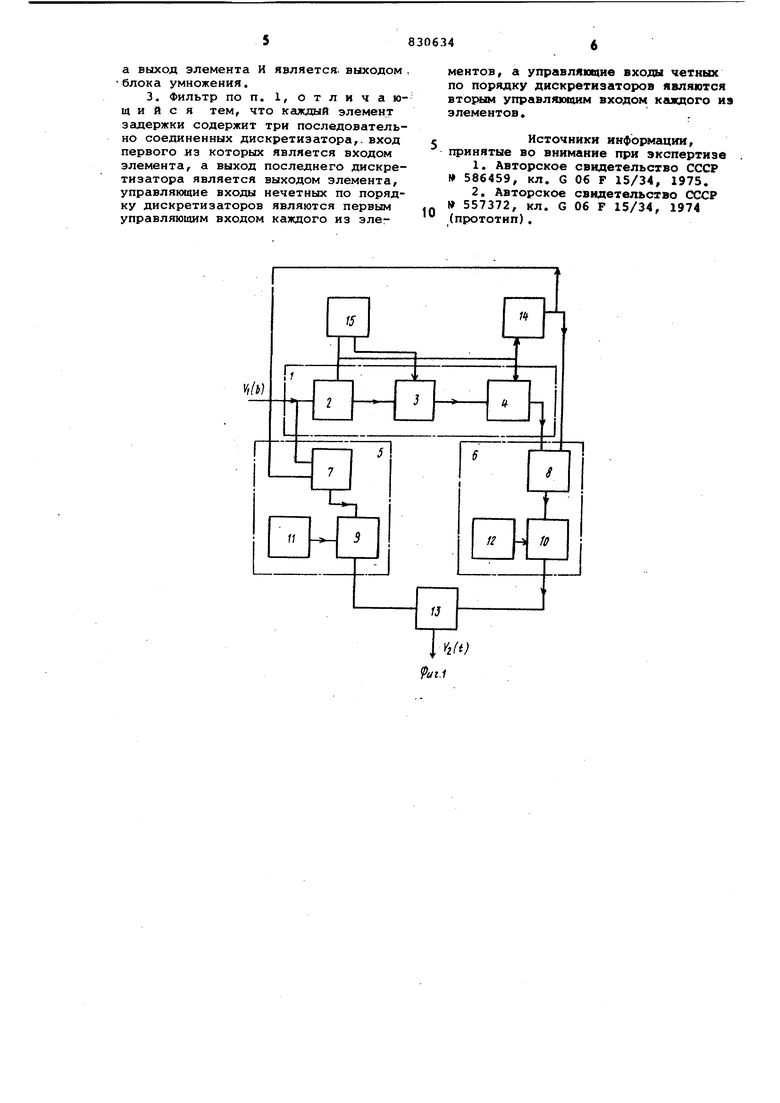
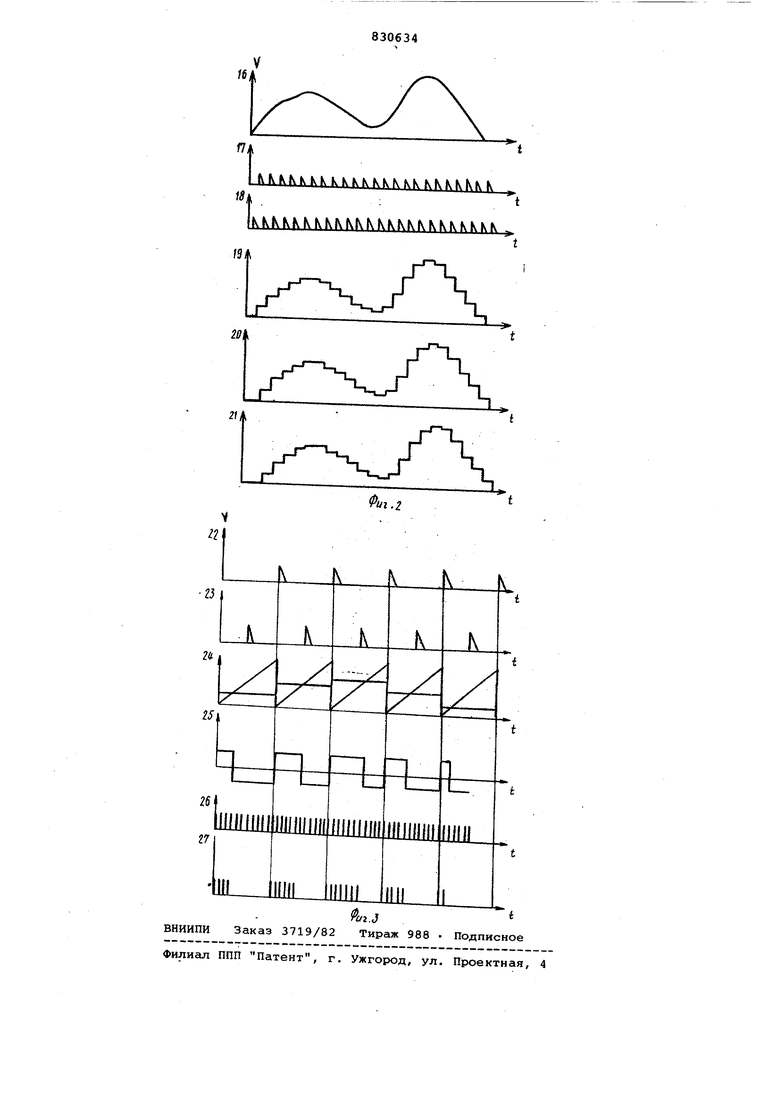
Изобретение относится к вычислительной технике и может быть исполь зовано для фильтрации электрических сигналов, Известен цифровой фильтр, содержа щий блок хранения весовых коэффициен тов, запоминающее устройство, блок перемножения, накапливающий сумматор коммутатор и блок фиксации переполне ния 1. Недостатком этого фильтра является наличие значительного количества сложных электронных узлов. Известен также цифровой фильтр, содержащий блок дискретизации, анало го-цифровой преобразователь, I элементов задержки, I умножителей на постоянный коэффициент, сумматор. преобразователь аналог-частота и сче чик 2 . Однако из-за наличия таких сложных узлов, как аналого-цифровой прео цифровые элементы згшерж разователь, цифровые умножители на постоянки, ный коэффициент и преобразователь анёшог-частота, этот фильтр, оказывается чрезвычайно сложным. Цель изобретения - упрощение устройства. Поставленная цель достигается тем, что цифровой фильтр, содержащий п последовательно соединенных элементов задержки, вход первого из которых является входом фильтра, п блоков умножения и сумматор, входы которого соединены соответственно с выходами п блоков умножения, при этом вькоды элементов задержки подключены к первым входам соответствующих блоков умножения, содержит блок синхронизации и генератор пилообразного напряжения, выход которого соединен со вторымк входгими блоков умножения, первый выход блока синхронизации соединен с первьвФ управлякшими входами элементов задержки и входом генератора пилообразного напряжения, а второй выход блока синхронизации соединен со вторым : управляющими входами элементов задержки. Кроме того, каждый блок умножения содержит нуль-орган, генератор импульсов и элемент И, при этом первый и второй входы нуль-органа являются соответственно первым и вторым входом блока умножения, выход нуль-органа соединен с первым входом элемента И, второй вход которого соединен с выходом генератора импульсов, а. выход элемента И является выходом блока умножения. При этом каждый элемент задержки содержит три последова тельно соединенных дискретизатора, вход первого из которых является вхо дом элемента, а выход последнего дис ретизатора является выходом элемента управляющие входы нечетных по порядку дискретиэаторов являются первым управляющим входом каждого из элементов, а управляющие входы четных по порядку дискретизаторов являются вторым управляющим входом каждого из элементов, На фиг, 1 показана блок-схема фильтра; на фиг. 2 и 3 - временные диаграммы. Цифровой фильтр содержит элемент 1 задержки, включающий дискретизаторы 2-4, умножители 5 и 6 на постоянный коэффициент, включающие нуль-органы 7 и 8, элементы И 9 и 10 и генераторы 11 и 12 импульсов, сумматор 13, генератор 14 пилообразного напряжения, блок 15 синхронизации. На диаграммах-обозначены входнойсигнал 16 V (t) , импульсы 17 и 18 на первом и втором выходах блока синхронизации, напряжения 19-21 на выходах первого, второго и третьего дискретизаторов соответственно (фиг. 2). На диаграммах (фиг. 3) обозначены импульсы 22 и 23 на выходах блока синхронизации, напряжение 24 на выходах нуль-органа, выходные напряжения 25-27 нуль-органа, генератора импульсов и элемента И. Работа фильтра происходит по известному алгоритму для нерекурсивного фильтра Vrj, ( КТ ) .. a,j V, (KT-JT), где V ( КТ)-входная последовательност Vjj (КТ) - выходная последовательность а: - весовые коэффициенты.Для реали зации этого алгоритма необходима дис кретная задержка сигнала и суммирование взвешенных значений задержанно го сигнала. В устройстве задержка си нала осуществляется с помощью элемен .тов 1 задержки, выполненных на дискретизаторах 2-4. Задержка получается потому, что моменты срабатывания чет ных по порядку дискретизаторов сдвинуты на половину периода дискретизации относительно моментов срабатывания нечетных дискретизаторов (фиг.2) Взвешивание задержанного сигнала осуществляется с помощью умножителей 5 и 6 на постоянный коэффициент,состоящих из нуль-органов 7 и 8, управляемых элементов И 9 и 10 и генераторов 11 и 12 импульсов. С этой целью амплитуды сигналов на выходах дискретизаторов сначала преобразуются в длительность управляющих импульсов, Последнее осуществляется с помощью генератора 14 пилообразного напряжения и нуль-органа (фиг.З), Полученные сигналы открывают элементы И 9 и 10. На входы элементов И поступают импульсы от генераторов 11 и 12, частота следования которых пропорциональна весовым коэффициентам а:. Поскольку длительность управляющих импульсов пропорциональна амплитуде задержанного сигнала, а частота следования импульсов от генератора пропорциональна весовому коэффициенту, то на выходе элемента И образуются пачки импульсов, количество импульсов в которых пропорционально произведению амплитуды задержанного сигнала на соответствующий весовой коэффициент (фиг. 3). Суммирование взвешенных значений задержаннога сигнала осуществляется .сумматором 13. Таким образом, за счет исключения таких сложных узлов, как аналого-цифровой преобразователь, цифровая линия задержки, преобразователь ана-лог-частота, предлагаемое устройство оказывается значительно проще известных. Максимальное значение входного сигнала определяется амплитудой пилообразного напряжения. Стоикюсть предлагаемого устройства в несколько десятков раз ниже стоимости известных. Изобретение используется при создании бортовой аппаратуры для измерения ускорений автомобилей. Формула изобретения 1.Цифровой фильтр, содержащий п последовательно соединенных элементов задержки, вход первого из которых является входом фильтра, п блоков умножения и сумматор, входы которого соединены соответственно с выходами п блоков умножения, при этом выходы элементов задержки подключены к первым входам соответствующих блоков умножения, отличающийся тем, что, с целью упрощения устройства, он содержит блок синхронизации и генератор пилообразного напряжения, выход которого соединен со вторыми входами блоков умножения, первый выход блока синхрониэации соединен с первыми управляющими входами элементов згщержки и входом генератора пилообразного напряжения, а второй выход блока синхронизации соединен со вторыми управляющими входами элементов задержки. 2.Фильтр по п. 1, отличающ и и с я тем, что каждый блок умножения содержит нуль-орган, генератор импульсов и элемент И, при этом первый и второй входы нуль-органа являются соответственно первым и вторым входами блока умножения, выход нульоргана соединен с первым входом элемента И, второй вход которого соединен с выходом генератора импульсов, |
а выход элемента И является, выходом блока умножения.
3. Фильтр по п. 1, отличающийся тем, что каждый элемент задержки содержит три последовательно соединенных дискретиэатора,. вход первого из которых является входом элемента, а выход последнего дискретиэатора является выходом элемента, управляющие входы нечетных по порядку дискретиэаторов являются первым управляющим входом каждого из элементов, а управляющие входы четных по порядку дискретизаторов являются вторым управляющим входом кгикдого иэ элементов,
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР 586459, кл. G 06 F 15/34, 1975.
2.Авторское свидетельство СССР 557372, кл. G 06 F 15/34, 1974
(прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровой фильтр | 1979 |
|
SU900410A2 |
| Цифровой фильтр | 1984 |
|
SU1262690A1 |
| СПОСОБ И УСТРОЙСТВО СИНХРОНИЗАЦИИ М-ПОСЛЕДОВАТЕЛЬНОСТИ | 1997 |
|
RU2127954C1 |
| СПОСОБ И УСТРОЙСТВО СИНХРОНИЗАЦИИ М-ПОСЛЕДОВАТЕЛЬНОСТИ | 2002 |
|
RU2244384C2 |
| СПОСОБ И УСТРОЙСТВО СИНХРОНИЗАЦИИ М-ПОСЛЕДОВАТЕЛЬНОСТИ С ПОВЫШЕННОЙ СЛОЖНОСТЬЮ | 1999 |
|
RU2153230C1 |
| СПОСОБ ЦИФРОВОЙ РЕКУРСИВНОЙ ПОЛОСОВОЙ ФИЛЬТРАЦИИ И ЦИФРОВОЙ ФИЛЬТР ДЛЯ РЕАЛИЗАЦИИ ЭТОГО СПОСОБА | 2011 |
|
RU2460130C1 |
| ПРОГРАММИРУЕМЫЙ ЦИФРОВОЙ ФИЛЬТР | 1992 |
|
RU2057364C1 |
| Адаптивный нерекурсивный цифровой фильтр | 1988 |
|
SU1578806A1 |
| Умножитель частоты | 1982 |
|
SU1095345A1 |
| Адаптивный дискретный согласован-Ный фильТР | 1979 |
|
SU813699A1 |
hKAKKKKKKKKKKNNKKKKKKKK
t
-.
fS
