Изобретение относится к вычислительной технике и может быть использовано в системах цифровой обработки информации с высокими требованиями к частотной избирательности выполнения фильтрации для выделения полезного сигнала в условиях действия мощных широкополосных помех.
Известны способы цифровой рекурсивной фильтрации сигналов, позволяющие выделять полезный сигнал в условиях действия помех [1; 2]. Указанные способы цифровой фильтрации основаны на сравнении фильтруемого цифрового сигнала xi с выходным сигналом  , путем определения разностного сигнала
, путем определения разностного сигнала  , а выходной сигнал
, а выходной сигнал  формируют в виде суммы предыдущего значения
формируют в виде суммы предыдущего значения  , и дополнительного сигнала Δi, причем дополнительный сигнал Δi выбирают равным значению Δ, если Δxi≥Δ, значению (-Δ), если Δxi≤Δ, и нулю, если -Δ<Δi<Δ, где Δ соответствует максимально допустимому превышению сигнала помехи над полезным сигналом [1] или цене единицы младшего разряда цифрового кода xi [2].
, и дополнительного сигнала Δi, причем дополнительный сигнал Δi выбирают равным значению Δ, если Δxi≥Δ, значению (-Δ), если Δxi≤Δ, и нулю, если -Δ<Δi<Δ, где Δ соответствует максимально допустимому превышению сигнала помехи над полезным сигналом [1] или цене единицы младшего разряда цифрового кода xi [2].
Недостатком этих способов является невозможность выполнения цифровой рекурсивной полосовой фильтрации, так как в них используют преобразования сигнала первого порядка на основе формирования первых разностей xi-xi-1 с задержками на один период частоты дискретизации. Такое преобразование обеспечивает сглаживание фильтруемого сигнала на фоне помех, лежащих в более низкочастотной области, чем полезный сигнал, и не решает задачи полосовой фильтрации, для которой в самом простейшем варианте требуется выполнение преобразования в соответствии с разностным управлением второго порядка.
В том случае, когда требуется высокая избирательность полосовой фильтрации для выделения полезного сигнала из помех, используют преобразование более высокого порядка.
Наиболее близким к предлагаемому является способ цифровой фильтрации, использующий последовательное (каскадное) преобразование фильтруемого сигнала [3], принимаемый в качестве прототипа предлагаемого способа. Известный способ цифровой рекурсивной фильтрации включает r последовательных ступеней преобразования фильтруемого сигнала, в каждой из которых выполняют весовое суммирование задержанных значений входного (xn) и выходного (yn) сигналов так, что отфильтрованный сигнал i-ой ступени фильтрации (i=0, 1, …r) является входным сигналом для (i+1)-ой ступени преобразования. Преобразование сигнала i-ой ступени в способе-прототипе выполняют по правилу:

где xni, yni - значения входного и выходного сигналов i-ой ступени преобразования;
βki, αki - значения весовых коэффициентов i-ой ступени преобразования.
Преобразованию (1) соответствует передаточная функция ([3], стр.52),

Для фильтра с числом ступеней преобразования, равном r, передаточная функция фильтра:

Недостатком известного способа является низкое быстродействие при выполнении полосовой фильтрации из-за необходимости выполнять в каждом i-ом звене преобразование вида: β1ixn-1, i, α1iyn-1,i, причем увеличение времени при выполнении фильтрации тем больше, чем выше требования к избирательности полосовой фильтрации (чем больше требуется число ступеней преобразования r). Так, например, при выполнении полосовой рекурсивной фильтрации известным способом с четырьмя ступенями преобразования, при котором каждая ступень выполняет преобразование сигнала по правилу (1), крутизна скатов амплитудно-частотной характеристики (АЧХ) составляет всего 40 децебел на октаву ([3], стр.144, 145). При этом требуется выполнение двадцати операций умножения многоразрядных чисел и шестнадцати операций арифметического сложения, из-за чего быстродействие известного способа фильтрации оказывается низким.
Известен программно-управляемый цифровой фильтр [4], реализующий известный способ фильтрации. Фильтр содержит блок задания коэффициентов, два блока памяти, арифметический блок, два мультиплексора, сумматор, выходной регистр, блок управления, счетный триггер, инвертор, элементы И и ИЛИ. Программно-управляемый цифровой фильтр выполнен в соответствии с каскадной формой реализации цифровых рекурсивных фильтрах на звеньях второго порядка. Каждое звено этого фильтра производит преобразование сигнала в соответствии с разностным уравнением (1). Фильтр, в зависимости от загружаемых в его память весовых коэффициентов, может выполнять фильтрацию нижних частот, верхних частот и полосовую фильтрацию.
Недостатком этого фильтра является большой объем необходимого оборудования для его реализации. Кроме того, при реализации полосовой фильтрации быстродействие фильтра оказывается низким, так как при этом используется последовательное включение звеньев нижних и верхних частот, что приводит к необходимости выполнения большего числа арифметических операций.
Известен рекурсивный полосовой фильтр [5]. Этот фильтр содержит два блока задержки, три сумматора и три умножителя. Фильтр работает в соответствии с разностным уравнением второго порядка. Для выполнения полосовой фильтрации в этом устройстве есть возможность взаимно независимой перестройки фильтра по полосе пропускания и по резонансной частоте путем изменения значений его весовых коэффициентов.
Недостатком такого фильтра является его низкая избирательность, ограниченная избирательными возможностями фильтров второго порядка, которая для полосового фильтра не превышает крутизны скатов АЧХ 10 децибел на октаву (10 дБ/окт).
Наиболее близким к предлагаемому цифровому рекурсивному полосовому фильтру является программируемый цифровой фильтр [6], который выбирается в качестве прототипа устройства. Этот фильтр содержит регистр хранения текущего значения входного сигнала, четыре блока умножения, четыре сумматора, два элемента задержки, два мультиплексора, четыре преобразователя кода, дешифратор, блок вычисления коэффициента передачи, регистр хранения состояния фильтра, два инвертора и блок синхронизации, обеспечивающий управление работой фильтра. Фильтр-прототип перед началом выполнения фильтрации настраивается на фильтрацию нижних частот, полосовую или режекторную фильтрацию путем выбора одного из четырех уравнений второго порядка.
Недостатком фильтра-прототипа является низкая избирательность при выполнении полосовой фильтрации. Кроме того, фильтр-прототип сложен в реализации и имеет низкое быстродействие.
Фильтр-прототип [6] так же, как известные фильтры [4; 5], реализует известный способ цифровой фильтрации [3].
Задачей изобретения является создание нового способа рекурсивной цифровой полосовой фильтрации и цифрового фильтра для реализации этого способа, позволяющих повысить быстродействие выполнения полосовой фильтрации при обеспечении высокой избирательности и простоты реализации.
Сущность изобретения состоит в том, что предлагается способ, включающий r последовательных ступеней преобразования фильтруемого сигнала, в каждой из которых выполняют весовое суммирование задержанных значений входного (xni) и выходного (yni) сигналов так, что отфильтрованный фигнал i-ой ступени фильтрации (i=0, 1, …r) является входным сигналом для (i+1)-ой ступени, отличающийся тем, что преобразование сигнала i-ой ступени выполняют по правилу:

причем, предварительно вычисленные весовые коэффициенты фильтрации выбирают исходя из требуемых значений полосы пропускания Δf и центральной полосы пропускания fц, а значения частоты дискретизации задают в четыре раза больше центральной частоты полосы пропускания.
Значения весовых коэффициентов фильтрации вычисляют по формулам:
К0=(K1+К2+1)2,
В отличие от известного способа-прототипа [3] в предложенном способе в каждой ступени преобразования выполняют преобразование четвертого порядка (3), причем для формирования отфильтрованного сигнала i-ой ступени требуется меньшее число арифметических операций, чем в прототипе для выполнения преобразования второго порядка (в прототипе - 5 умножений и четыре арифметических сложения многоразрядных чисел, в предлагаемом способе - три умножения многоразрядных чисел, одно умножение на 2 и четыре арифметических сложений многоразрядных чисел).
В результате одна ступень преобразования в предлагаемом способе обеспечивает существенно большую избирательность и при этом требует меньшего времени на выполнение вычислительных операций. Для достижения одинаковой избирательности предлагаемого способа и способа-прототипа в способе-прототипе требуется использовать в несколько раз большее число ступеней преобразования, что обеспечивает предлагаемому способу существенный выигрыш в быстродействии.
В предлагаемом способе преобразованию сигнала (3) при выполнении фильтрации соответствует передаточная функция, получаемая путем применения z-преобразования к (3). С учетом r последовательных ступеней преобразования, передаточная функция определяется выражением:

АЧХ цифрового фильтра с такой передаточной функцией, определяемая как H(f)=|H(Z)| при  , представляется следующим выражением:
, представляется следующим выражением:

где  - нормированная частота;
- нормированная частота;
f - частота сигнала;
fД=4fц - частота дискретизации;
fц - центральная частота полосы пропускания;
К0, K1, К2 - коэффициенты, определяющие значения полосы пропускания и центральной частоты полосы пропускания, вычисляются по формулам (4).
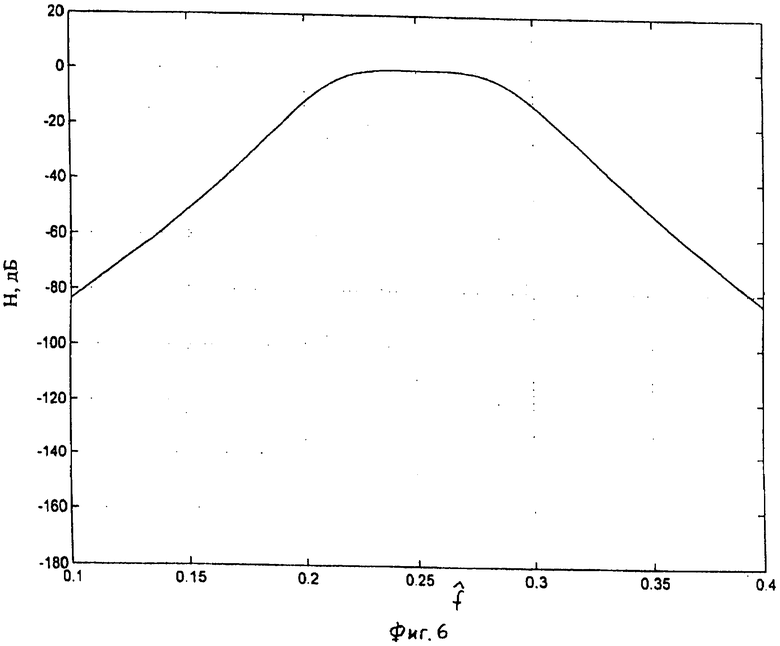
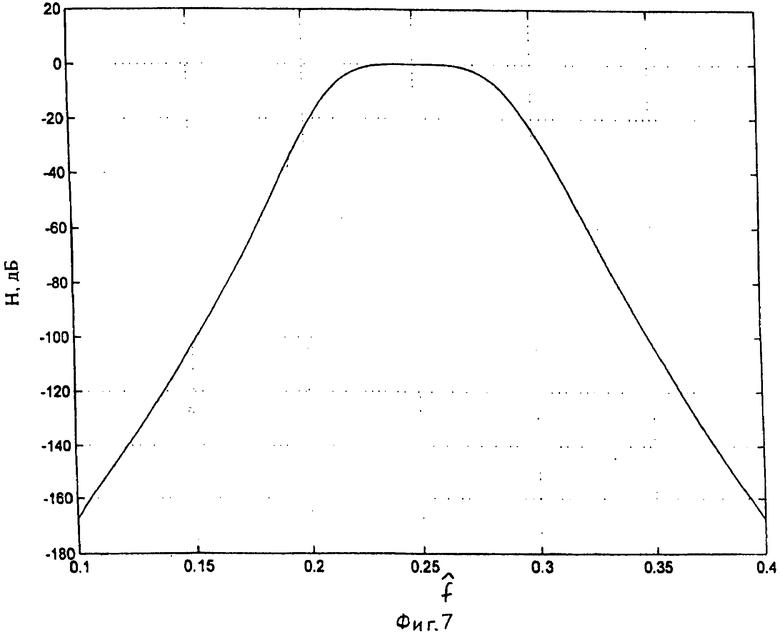
Примеры АЧХ, рассчитанных по выражениям (6) и (4), приведены на фиг.6 и фиг.7.
Из рассмотрения АЧХ видно, что предлагаемый способ позволяет обеспечить чрезвычайно высокую частотную избирательность полосовой фильтрации. Так две ступени преобразования (фиг.6) обеспечивают крутизну скатов АЧХ около 75 дБ/окт. Уже при четырех ступенях преобразования фильтруемого сигнала (3) (фиг.7) в предлагаемом способе крутизна скатов АЧХ составляет примерно 130 дБ/окт, что превышает величину в 100 дБ/окт, обеспечивающую требуемую высокую степень выделения полезного сигнала из помех.
Как было указано выше, в известном способе-прототипе четыре ступени преобразования (1) обеспечивают при полосовой фильтрации крутизну скатов АЧХ 40 дБ/окт, т.е. примерно в 3,25 раза меньшую избирательность при меньшем быстродействии. Чтобы достигнуть избирательности в 100 дБ/окт в способе-прототипе необходимо не менее десяти ступеней преобразования. В этом случае быстродействие способа -прототипа оказывается, примерно, в 5,2 раза ниже, чем быстродействие предлагаемого способа при одинаковой избирательности.
В результате решается поставленная задача создания нового способа, позволяющего повысить быстродействие выполнения полосовой фильтрации при обеспечении высокой избирательности.
Для реализации нового способа предлагается цифровой фильтр.
Техническая задача, решаемая предлагаемым цифровым фильтром, заключается в повышении быстродействия и упрощении фильтра при выполнении полосовой фильтрации.
Указанная техническая задача достигается тем, что предлагается цифровой, рекурсивный полосовой фильтр, содержащий три блока умножения, два сумматора, два регистра, мультиплексор и блок управления, первый выход которого соединен с входом записи первого регистра, информационный вход которого является входом фильтра, выход мультиплексора соединен с первым входом первого сумматора, а выход первого блока умножения соединен с первым входом второго сумматора, отличающийся тем, что в него введены два блока хранения выборочных значений сигнала, блок умножения на два, третий регистр, и блок хранения коэффициентов, три выхода которого соединены с первыми входами первого, второго и третьего блоков умножения, вторые входы которых соответственно с первым выходом второго блока хранения выборочных значений сигнала, выходом первого сумматора и вторым выходом второго блока хранения выборочных значений сигнала, выходы второго и третьего блоков умножения соединены со вторым и третьим входами второго сумматора, выход которого соединен с входом второго регистра, выход которого соединен с информационным входом второго блока хранения выборочных значений сигнала, с входом третьего регистра и первым входом мультиплексора, подключенного вторым входом к выходу первого регистра, управляющим входом - ко второму входу блока управления, а выходом - к информационному входу первого блока хранения выборочных значений сигнала, первый выход которого через блок умножения на два соединен со вторым входом первого сумматора, второй выход - с третьим входом первого сумматора, управляющий вход - с управляющим входом второго блока хранения выборочных значений сигнала и третьим входом блока управления, а вход записи - с четвертым выходом блока управления, вход которого является входом установки номера фильтра, а пятый, шестой, седьмой и восьмой выходы блока управления соединены соответственно с входом блока хранения коэффициентов, входом записи второго регистра, входом записи второго блока хранения выборочных значений сигнала и входом записи третьего регистра, выход которого является выходом фильтра.
Сущность изобретения состоит в новом построении схемы цифрового фильтра, позволяющей обеспечить реализацию любого заданного количества последовательно включаемых ступеней фильтрации четвертого порядка путем многократного использования набора одних и тех же блоков, состав которых и связи между ними отличаются от прототипа, при этом в фильтре реализован новый заявляемый способ полосовой фильтрации, что обеспечивает повышение быстродействия, а сокращенный состав блоков обеспечивает упрощение фильтра.
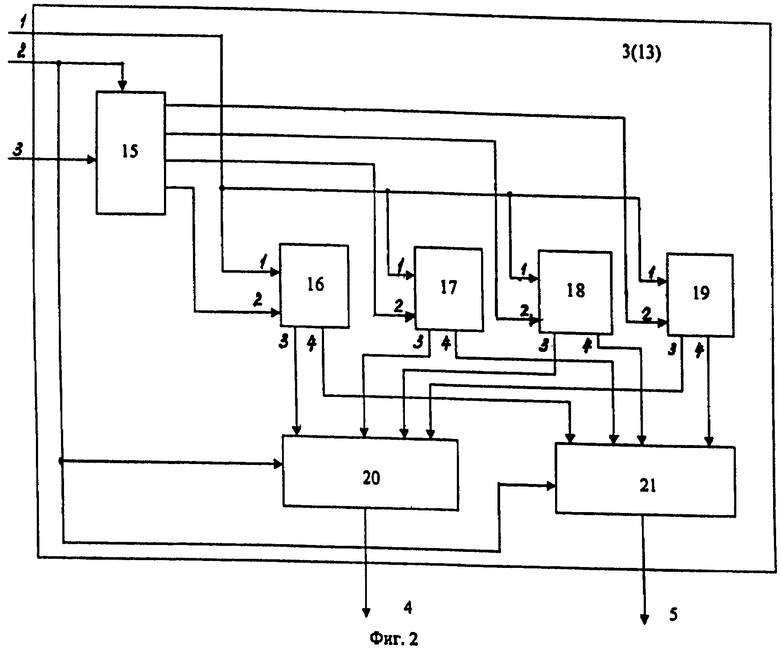
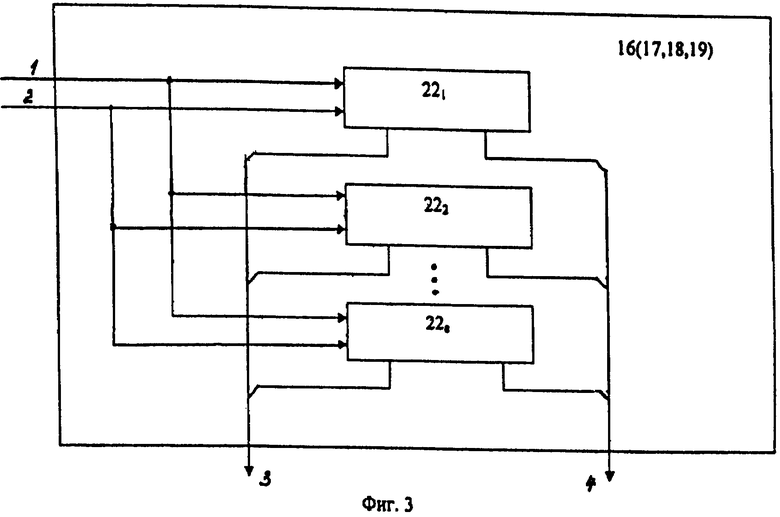
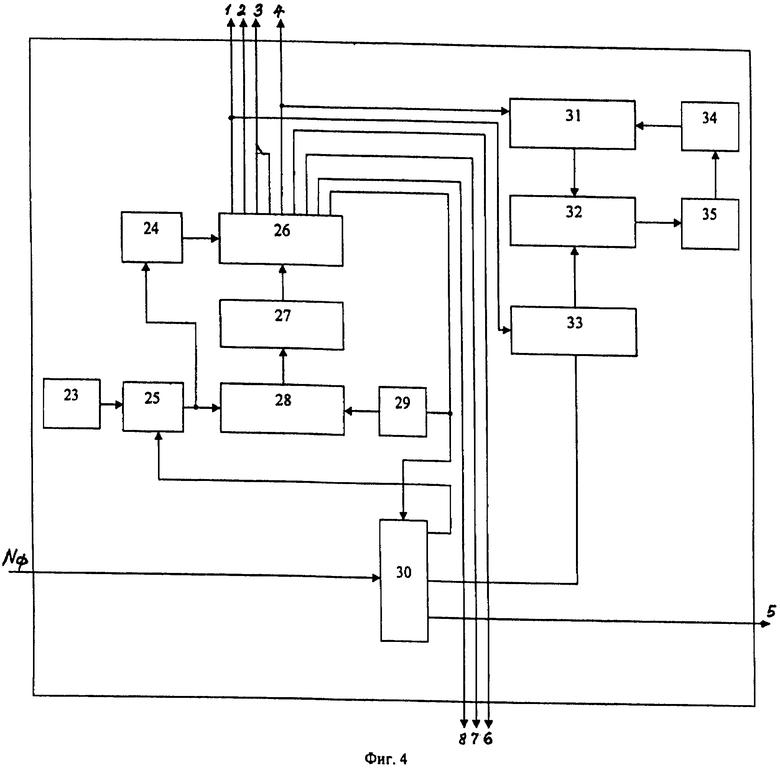
На фиг.1 представлена структурная схема цифрового рекурсивного полосового фильтра, на фиг.2 - структурная схема блока хранения выборочных значений сигнала, на фиг.3 - структурная схема блока регистров сдвига, на фиг.4 - структурная схема блока управления, на фиг.5 - временные диаграммы работы цифрового фильтра.
На фиг.6 и фиг.7 приведены АЧХ цифрового фильтра, состоящего из двух и четырех ступеней преобразования соответственно.
На фиг.1 обозначены:
1, 12, 14 - регистры;
2 - мультиплексор;
3, 13 - блоки хранения выборочных значений сигнала;
4 - умножитель на 2;
5, 11 - сумматоры;
6 - блок управления;
7 - блок хранения коэффициентов;
8, 9, 10 - блоки умножения.
На фиг.2 обозначены:
15 - демультиплексор;
16, 17, 18, 19 - блоки регистров сдвига;
20, 21 - мультиплексоры.
На фиг.3 обозначены:
221 - 22е - регистры сдвига.
На фиг.4 обозначены:
23 - генератор импульсов;
24, 29, 34 - элементы задержки;
25 - делитель частоты;
26, 30, 33 - регистры;
27 - постоянное запоминающее устройство (ПЗУ);
28, 31 - счетчики;
32 - блок вычитания;
35 - дешифратор нуля.
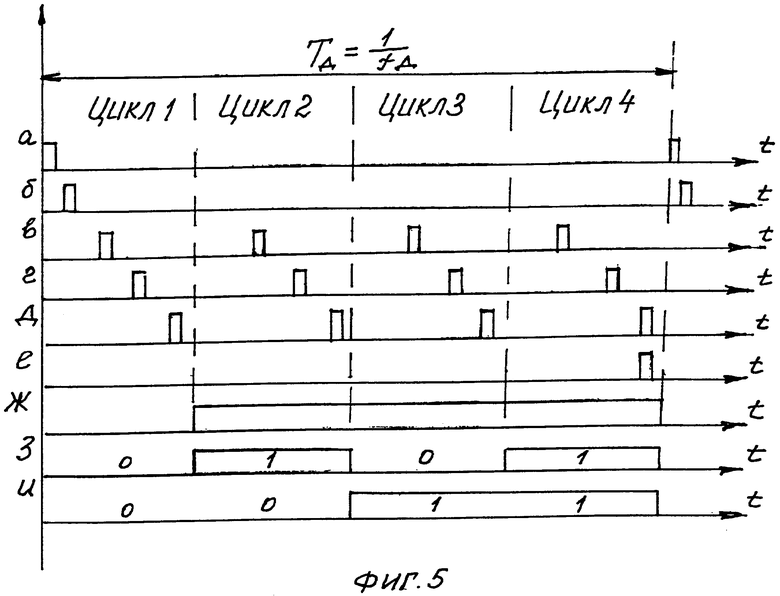
На фиг.5 обозначены:
а - сигнал записи номера фильтра в регистр 30;
б - сигнал записи в регистр 1;
в - сигнал записи в блок 3 хранения выборочных значений сигнала;
г - сигнал записи в регистр 12;
д - сигнал записи в блок 13 хранения выборочных значений сигнала;
е - сигнал записи в регистр 14;
ж - сигнал управления мультиплексором 2;
з, и - двухразрядный (цифровой) сигнал управления блоками 3 и 13 хранения выборочных значений сигнала (з - сигнал младшего разряда, и - сигнал старшего разряда).
Цифровой рекурсивный полосовой фильтр (фиг.1) содержит регистр 1 хранения текущего значения входного сигнала, информационный вход которого является входом фильтра, вход записи подключен к первому выходу блока 6 управления, а выход соединен с первым входом мультиплексора 2. Второй вход мультиплексора 2 соединен с выходом регистра 12, входами блока 13 хранения выборочных значений сигнала и регистра 14, управляющий вход мультиплексора 2 соединен со вторым выходом блока 6 управления. Выход мультиплексора 2 соединен с первым входом сумматора 5 и информационным входом блока 3 хранения выборочных значений сигнала, управляющий вход которого объединен с управляющим входом блока 13 хранения выборочных значений сигнала и подключен к третьему выходу блока 6 управления, четвертый выход которого соединен с входом записи блока 3 хранения выборочных значений сигнала. Первый выход блока 3 хранения выборочных значений сигнала через умножитель на два связан со вторым входом сумматора 5, третий вход которого соединен со вторым выходом блока 3 хранения, а выход - со вторым входом блока 9 умножения, подключенного первым входом ко второму выходу блока 7 хранения коэффициентов, первый и третий выходы которого соединены с первыми входами блоков 8 и 10 умножения соответственно, а вход соединен с пятым выходом блока 6 управления. Вторые входы блоков 8 и 10 умножения соединены с первым и вторым выходами блока 13 хранения выборочных значений сигнала. Выходы умножителей 8, 9, 10 соединены соответственно с первым, вторым и третьим входами сумматора 11, выход которого соединен с информационным входом регистра 12, подключенного входом записи к шестому выходу блока 6 управления. Вход блока 6 управления является входом установки номера фильтра. Седьмой и восьмой выходы блока 6 управления соединены соответственно с входами записи блока 13 хранения выборочных значений сигнала и регистра 14, выход которого является выходом фильтра.
В сумматоре 5 первый и третий входы суммирующие, а второй вход вычитающий.
В сумматоре 11 первый и третий входы вычитающие, а второй вход суммирующий.
Блоки 3 и 13 хранения выборочных значений сигнала имеют одинаковый состав и структуру (фиг.2).
Блок 3 (13) хранения выборочных значений сигнала содержит демультиплексор 15, управляющий вход которого объединен с управляющими входами мультиплексоров 20, 21 и является управляющим входом 2 блока 3 (13). Информационный вход демультиплексора 15 является входом 3 записи блока 3(13) хранения выборочных значений сигнала.
Четыре выхода демультиплексора 15 соединены соответственно с входами 2 синхронизации блоков 16, 17, 18, 19 регистров сдвига, информационные входы 1 которых объединены и подключены к информационному входу 1 блока 3 (13) хранения выборочных значений сигнала.
Выходы 3 блоков 16, 17, 18, 19 регистров сдвига соединены с входами мультиплексора 20, выход которого является выходом 4 блока 3 (13) хранения выборочных значений сигнала. Выходы 4 блоков 16, 17, 18, 19 регистров сдвига соединены с входами мультиплексора 21, выход которого является выходом 5 блока 3 (13) хранения выборочных значений сигнала.
Каждый из блоков 16, 17, 18, 19 регистров сдвига содержит е четырехразрядных регистров сдвига 22 (221 22е) (e - разрядность двоичных чисел при выполнении фильтрации) (фиг.3). Информационные входы регистров 221-22е сдвига образуют многоразрядный информационный вход 1 блока 16 (17, 18, 19) регистров сдвига.
Объединенные входы синхронизации регистров 221-22е сдвига образуют вход синхронизации 2 блока 16 (17, 18, 19) регистров сдвига. Выходы вторых разрядов регистров 221-22е образуют многоразрядный выход 3 блока 16. 17, 18, 19 выходы четвертых разрядов регистров 221-22е образуют многоразрядный выход 4 блока 16 (17, 18, 19).
В блоке 6 управления (фиг.4) выход генератора 23 импульсов соединен с входом делителя частоты 25. Выход делителя 25 соединен со счетным входом счетчика 28 и через элемент 24 задержки подключен к входу записи регистра 26. Выход счетчика 28 соединен с адресным входом постоянного запоминающего устройства 27, выход которого соединен с входом регистра 26. Выход старшего разряда регистра 26 соединен с входом записи регистра 30 и через элемент задержки 29 подключен к входу установки в ноль счетчика 28. Вход регистра 30 является входом номера цифрового фильтра (Nф). Выходы первых m разрядов регистра 30 соединены с входом установки коэффициента деления делителя частоты 25 (максимальный коэффициент деления равен 2m). Выходы двух следующих разрядов регистра 30 подключены к входу регистра 33. Выходы остальных разрядов регистра 30 образуют пятый выход блока 6 управления. Вход записи регистра 33 соединен с выходом первого разряда регистра 26, являющимся первым выходом блока 6 управления. Выход регистра 33 соединен с первым входом блока 32 вычитания, второй вход которого соединен с выходом счетчика 31, а выход через дешифратор нуля 35 и элемент задержки 34 подключен к входу установки нуля счетчика 31. Счетный вход счетчика 31 соединен с выходом пятого разряда регистра 26, являющимся четвертым выходом блока управления. Выход второго разряда регистра 26 является вторым выходом блока 6 управления. Выходы третьего и четвертого разрядов регистра 26 образуют третий двухразрядный выход блока 6 управления. Выходы шестого, седьмого и восьмого разрядов регистра 26 являются соответственно шестым, седьмым и восьмым выходами блока 6 управления.
Цифровой фильтр реализует предложенный способ цифровой фильтрации. Фильтр выполнен в соответствии с каскадной реализацией. Каждая ступень преобразования в фильтре работает по правилу, определенному разностным уравнением четвертого порядка (3).
В цифровом фильтре обеспечена возможность задания работы с необходимыми полосой пропускания, центральной частотой полосы пропускания и крутизной скатов АЧХ, путем хранения в блоке 7 набора коэффициентов для различных фильтров и выбора номера фильтра перед началом выполнения фильтрации. В соответствии с выражением (6) для получения требуемой АЧХ должны быть заданы наборы коэффициентов, рассчитываемые по формулам (4), и параметр r. Рассчитанные наборы коэффициентов для разных значений полосы пропускания и центральной частоты полосы пропускания хранятся в блоке 7 хранения коэффициентов. Так как при любом количестве ступеней преобразования для получения фильтра с любым конкретным значением полосы пропускания и центральной частоты полосы пропускания требуется всего три коэффициента, то при использовании современных элементов памяти, на которых выполняется блок 7 хранения коэффициентов, в нем может храниться необходимое количество наборов коэффициентов для реализации практически любых требований к перестройке характеристик фильтра.
Информация о требуемых характеристиках фильтра содержится в информационном слове «номер фильтра» (Nф), поступающем на вход блока 6 управления. В информационном слове Nф содержатся следующие данные.
1) Двоичное число, определяющее во сколько раз частота дискретизации фильтра меньше максимально возможной (первые m разрядов информационного слова). Это позволяет задавать требуемое значение частоты дискретизации фильтра.
2) Двоичное число, определяющее число ступеней преобразования r, выполняемое фильтром (разряды m+1, m+2 в информационном слове; на практике r≤4, что обеспечивает реализацию фильтров до 16 порядка включительно). Это позволяет задать требуемое высокое значение крутизны скатов АЧХ фильтра.
3) Двоичное число, определяющее номер набора коэффициентов фильтра (старшие разряды в информационном слове). Это позволяет задать требуемое значение полосы пропускания и центральной частоты полосы пропускания фильтра.
Работа цифрового фильтра состоит из нескольких циклов. Число циклов работы фильтра определяется значением параметра r, определяющего крутизну скатов АЧХ. На фиг.5 временная диаграмма, поясняющая последовательность выполнения фильтрации, приведена для r=4. Сигналы, представленные на фиг.5, формируются блоком 6 управления.
Принцип формирования сигналов управления следующий.
Импульсы, генерируемые генератором импульсов 23, поступают через делитель частоты 25 в счетчик 28. Число на выходе счетчика 28 является адресом постоянного запоминающегося устройства 27. Число разрядов постоянного запоминающегося устройства 27 равно числу формируемых сигналов управления, а количество ячеек определяется минимальным интервалом между формируемыми импульсами. В ячейках постоянного запоминающего устройства записаны сигналы логической единицы в тех разрядах, для которых соответствующее значение сигнала управления принимает высокий уровень. В остальных разрядах ячеек записаны сигналы логического нуля. Содержимое ячеек постоянного запоминающего устройства 27 последовательно записывается в регистр 26 сигналом с делителя частоты 25, задержанным элементом 24 задержки. После записи содержимого последней ячейки в регистр 26 на выходе его последнего разряда появляется сигнал логической единицы, которым через элемент 29 задержки производится установка счетчика 28 в исходное состояние, после чего процесс формирования управляющих сигналов повторяется.
В первом цикле работы информационное слово «номер фильтра» Nф, поступающее на вход блока управления, записывается в регистр 30 сигналом записи (сигнал а на фиг.5). При этом устанавливается коэффициент деления делителя частоты 25, определяющий значение частоты дискретизации при работе фильтра, параметр r, определяющий крутизну скатов АЧХ, и число, определяющее номер фильтра. На выходе 5 блока 6 управления устанавливается число, определяющее номер набора коэффициентов, являющееся адресом блока 7 хранения коэффициентов. Фильтр готов к приему входного сигнала. Очередное значение входного сигнала записывается в регистр 1 сигналом с первого выхода блока 6 управления (сигнал 6 на фиг.5). Этим же сигналом производится запись параметра r в регистр 33 блока 6 управления. На выходе блока 32 вычитания формируется разность между числом, записанным в счетчике 31 и регистре 33. По величине этой разности в фильтре автоматически определяется, является или нет данный цикл работы последним в этом периоде дискретизации. Цикл работы фильтра последний, если разность равна нулю. Значение фильтруемого сигнала из регистра 1 поступает через мультиплексор 2, открытый на это направление (см. сигнал ж на фиг.5, формируемый на втором выходе блока 6 управления), в блок 3 хранения выборочных значений сигнала.
Демультиплексор 15 блока 3 хранения выборочных значений сигнала скомутирован таким образом (см. сигналы з, и на фиг.5 управления демультиплексором 15 и мультиплексорами 20, 21, формируемые на третьем выходе блока 6 управления), что сигнал записи с четвертого выхода блока 6 управления (сигнал в на фиг.5) поступает на вход записи блока 16 регистров сдвига. Происходит сдвиг поступившего значения поразрядно в регистрах 22 сдвига блока 16 регистров сдвига. Настоящее (xn, 1) и предыдущие значения, задержанные на два (xn-2, 1) и четыре периода частоты дискретизации (xn-4, 1), хранящиеся соответственно в регистре 1 и регистрах сдвига 22 блока 16 регистров сдвига блока 3, поступают непосредственно и через мультиплексоры 20 и 21 на первый вход сумматора 5, вход умножителя на два 4 и третий вход сумматора 5. Так как первый и третий входы сумматора 5 суммирующие, а второй вход вычитающий, то на выходе сумматора 5 оказывается сформированным значение нерекурсивной части разностного уравнения (3) для первой ступени преобразования xn, 1-2хn-2, 1+xn-4, 1. Блоки умножения 8 и 10 выполняют умножения предыдущих значений, задержанных на два (yn-2, 1) и четыре (yn-4, 1) периода частоты дискретизации, хранящихся в блоке 13 хранения выборочных значений сигнала, на коэффициенты K1 и К2 соответственно, хранящиеся в блоке 7 хранения коэффициентов. Блок 9 умножения выполняет умножение числа, поступающего с сумматора 5 на коэффициент К0, хранящийся в блоке 7 хранения коэффициентов. После суммирования чисел, поступающих с выходов блоков 8, 9, 10 умножения, на выходе сумматора 11 оказывается сформированным результат фильтрации первой ступени преобразования (yn1). Сформированное значение yn1 записывается в регистр 12 сигналом записи, поступающим с шестого выхода блока 6 управления (сигнал г на фиг.5). Значение yn1 вдвигается в блок 16 регистров сдвига блока 13 хранения выборочных значений сигнала для использования в следующем периоде частоты дискретизации. Сигналы управления и записи в демультиплексор 15 блока 13 поступают соответственно с третьего и седьмого выходов блока 6 управления. На этом первый цикл работы фильтра заканчивается.
В последующих циклах работа фильтра данного периода дискретизации происходит аналогично. При этом мультиплексор 2 переключается сигналом, поступающим со второго выхода блока 6 управления в состояние, при котором информационный вход блока 3 хранения выборочных значений сигнала оказывается подключенным к выходу регистра 12 (сигнал ж на фиг.5), а управляющий сигнал, поступающий с третьего выхода блока 6 управления изменяется при переходе к следующему циклу, принимая значения 10, 01, 11 (сигналы з, и на фиг.5). В результате таких переключений сигналов управления мультиплексором 2 и блоками хранения 3 и 13 выборочных значений сигнала отфильтрованные на первом цикле работы фильтра значения сигнала записываются:
- на втором цикле в блоки 17 регистров сдвига;
- на третьем цикле в блоки 18 регистров сдвига;
- на четвертом цикле в блоки 19 регистров сдвига.
При переходе от цикла к циклу в счетчике 31 блока 6 управления добавляется единица сигналом, поступающим с пятого выхода регистра 26. В последнем цикле число в счетчике 31 становится равным r. На выходе блока 32 разности формируется число, равное нулю, означающее, что данный цикл последний. На выходе дешифратора нуля 35 формируется сигнал, который через элемент 34 задержки устанавливает счетчик 31 в нулевое состояние.
В конце четвертого цикла отфильтрованный сигнал из регистра 12 записывается сигналом, поступающим с восьмого выхода блока 6 управления (сигнал е на фиг.5), в регистр 14, выход которого является выходом цифрового фильтра.
В последующих периодах частоты дискретизации работа фильтра происходит аналогично.
По сравнению с известными техническими решениями предложенный способ и цифровой фильтр для реализации этого способа обеспечивают повышение быстродействия и упрощение фильтра при выполнении полосовой фильтрации.
Повышение указанных технических характеристик достигается следующими новыми решениями, заложенными в изобретение.
1. При выполнении фильтрации каждая ступень преобразования сигнала выполняется в соответствии с разностным уравнением четвертого порядка, содержащим члены только при четных степенях для выборочных значений сигнала. В результате количество операций умножения и сложения сокращается примерно в два раза. Это обеспечивает повышение быстродействия и сокращение количества блоков умножения.
2. Весовые коэффициенты К0, К1, K2, для конкретных значений полосы пропускания и центральной частоты полосы пропускания одинаковы во всех ступенях фильтрации. Это упрощает выполнение фильтрации, сокращает объем памяти для хранения коэффициентов и позволяет хранить необходимое количество наборов коэффициентов, обеспечивая реализацию большого числа вариантов полос пропускания и центральных частот полос пропускания.
3. Обеспечена реализация практически любого заданного количества последовательно включенных ступеней фильтрации путем многократного использования набора одних и тех же блоков, что позволяет обеспечить высокую избирательность без усложнения фильтра.
Предлагаемая совокупность признаков в рассмотренных автором решениях не встречалась для решения поставленной задачи и не следует явным образом из уровня техники, что позволяет сделать вывод о соответствии технического решения критериям "новизна" и "изобретательский уровень".
Цифровой фильтр для реализации предложенного способа выполняется на стандартной элементной базе для вычислительной техники, выпускаемой серийно отечественной промышленностью.
Используемые источники
1. Патент на изобретение РФ №2188499, кл. H03H 17/02, 07.04.2000.
2. Патент на изобретение РФ №2187883, кл. H03H 17/02, 19.06.2000.
3. Л.М.Гольденберг, Б.Д.Матюшкин, М.Н.Поляк. Цифровая обработка сигналов. Справочник. М.: Радио и связь, 1985, стр.52, 94, 144, 145 - прототип способа.
4. Авторское свидетельство СССР №1338006, кл. H03H 17/04, 22.07.1985.
5. Авторское свидетельство СССР №1224980, кл. H03H 17/04, 13.12.1984.
6. Патент на изобретение РФ №2057364, кл. G06F 17/14, 25.11.1992 - прототип устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЦИФРОВОЙ РЕКУРСИВНОЙ ПОЛОСОВОЙ ФИЛЬТРАЦИИ И ЦИФРОВОЙ ФИЛЬТР ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2014 |
|
RU2579982C2 |
| Рекурсивный цифровой фильтр | 1990 |
|
SU1732433A1 |
| ПРОГРАММИРУЕМЫЙ ЦИФРОВОЙ ФИЛЬТР | 1992 |
|
RU2057364C1 |
| ПРОГРАММИРУЕМЫЙ ЦИФРОВОЙ ФИЛЬТР | 1994 |
|
RU2097828C1 |
| ПРОГРАММИРУЕМЫЙ ЦИФРОВОЙ ФИЛЬТР | 1991 |
|
RU2006936C1 |
| Цифровой фильтр | 1979 |
|
SU898592A1 |
| Программно-управляемый цифровой фильтр | 1985 |
|
SU1338006A1 |
| Программируемый цифровой фильтр | 1986 |
|
SU1374244A1 |
| Программно-управляемый цифровой фильтр | 1979 |
|
SU877787A1 |
| Цифровой фильтр | 1976 |
|
SU638969A1 |
Изобретение относится к вычислительной технике и может быть использовано в системах цифровой обработки информации с высокими требованиями к частотной избирательности выполнения фильтрации. Техническим результатом является повышение быстродействия выполнения полосовой фильтрации. Способ цифровой фильтрации позволяет выделить полезный сигнал в условиях действия мощных широкополосных помех и может быть реализован в цифровом фильтре. При реализации способа производится последовательное преобразование фильтруемого сигнала так, что в каждой ступени фильтрации выполняется преобразование четвертого порядка, содержащее члены преобразования только при четных ступенях для выборочных значений сигнала. В результате такого преобразования сигнала сокращается количество операций, повышается быстродействие при выполнении фильтрации. Цифровой фильтр имеет простую структуру и может быть реализован на стандартной элементной базе. 2 н. и 1 з.п. ф-лы, 7 ил.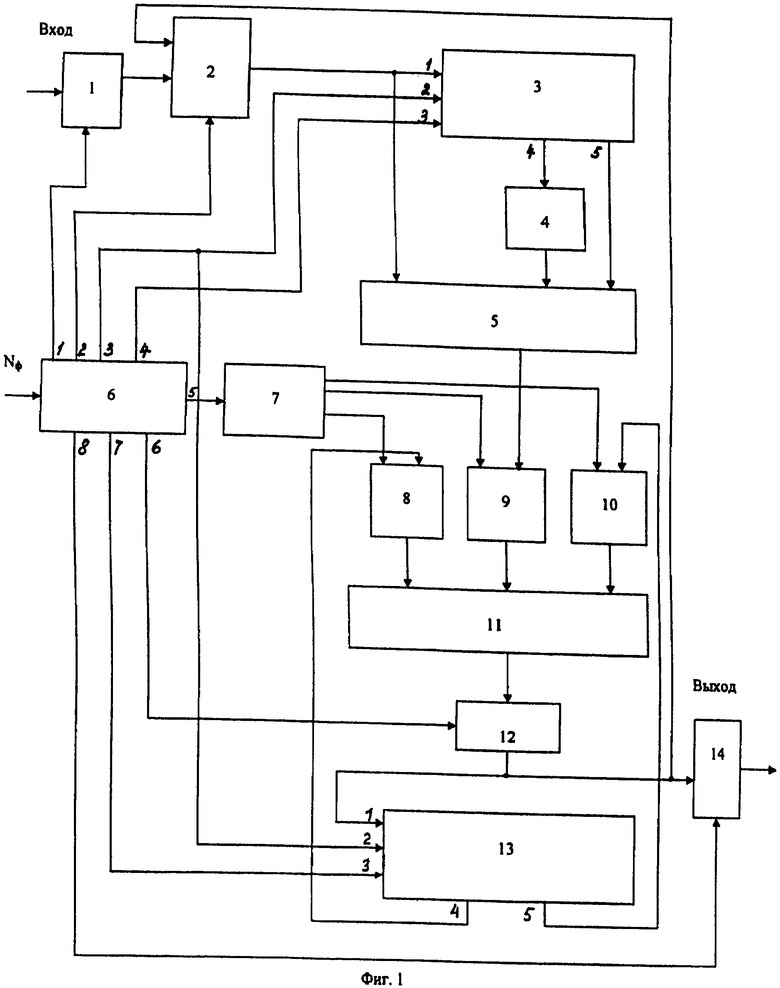
1. Способ цифровой рекурсивной полосовой фильтрации, включающий r последовательных ступеней преобразования фильтруемого сигнала, в каждой из которых выполняют весовое суммирование задержанных значений входного (xni) и выходного (yni) сигналов так, что отфильтрованный сигнал i-й ступени фильтрации (i=0, 1, …r) является входным сигналом для (i+1)-й ступени, отличающийся тем, что преобразование сигнала i-й ступени формируют по правилу
yni=K0(xni-2xn-2,i+xn-4,i)-K1yn-2,i-K2yn-4,i,
причем предварительно вычисленные весовые коэффициенты фильтрации выбирают, исходя из требуемых значений полосы пропускания Δf и центральной полосы пропускания fц, а значения частоты дискретизации задают в четыре раза больше центральной частоты полосы пропускания.
2. Способ по п.1, отличающийся тем, что весовые коэффициенты фильтрации вычисляют по формулам:
K0=(К1+К2+1)2.
3. Цифровой рекурсивный полосовой фильтр, содержащий три блока умножения, два сумматора, два регистра, мультиплексор и блок управления, первый выход которого соединен с входом записи первого регистра, информационный вход которого является входом фильтра, выход мультиплексора соединен с первым входом первого сумматора, а выход первого блока умножения соединен с первым входом второго сумматора, отличающийся тем, что в него введены два блока хранения выборочных значений сигнала, блок умножения на два, третий регистр и блок хранения коэффициентов, три выхода которого соединены с первыми входами первого, второго и третьего блоков умножения, вторые входы которых соединены соответственно с первым выходом второго блока хранения выборочных значений сигнала, выходом первого сумматора и вторым выходом второго блока хранения выборочных значений сигнала, выходы второго и третьего блоков умножения соединены со вторым и третьим входами второго сумматора, выход которого соединен с входом второго регистра, выход которого соединен с информационным входом второго блока хранения выборочных значений сигнала, с входом третьего регистра и первым входом мультиплексора, подключенного вторым входом к выходу первого регистра, управляющим входом - ко второму выходу блока управления, а выходом - к информационному входу первого блока хранения выборочных значений сигнала, первый выход которого через блок умножения на два соединен со вторым входом первого сумматора, второй выход - с третьим входом первого сумматора, управляющий вход - с управляющим входом второго блока хранения выборочных значений сигнала и третьим входом блока управления, а вход записи - с четвертым выходом блока управления, вход которого является входом установки номера фильтра, а пятый, шестой, седьмой и восьмой выходы блока управления соединены соответственно с входом блока хранения коэффициентов, входом записи второго регистра, входом записи второго блока хранения выборочных значений сигнала и входом записи третьего регистра, выход которого является выходом фильтра.
| RU 94038957 A1, 20.07.1996 | |||
| ЦИФРОВОЙ ИНТЕЛЛЕКТУАЛЬНЫЙ РЕКУРСИВНЫЙ ФИЛЬТР | 2007 |
|
RU2357357C2 |
| Способ получения -хлорэтиловых эфиров замещенных спиртов | 1976 |
|
SU643488A1 |
| Устройство обработки информации | 1986 |
|
SU1363238A1 |

