Предлагаемые технические решения объединены единым изобретательским замыслом и относится к области радиотехники, а именно к области синхронизации сложных сигналов.
Предлагаемые способ и устройство синхронизации M-последовательности могут быть использованы для синхронизации сложных сигналов при малом отношении сигнал/шум на входе приемника.
Известны способы синхронизации M-последовательности, описанные, например, в книге: В.И.Журавлев "Поиск и синхронизация в широком полосных системах". -М. Радио и связь. 1986, с.86-102. Однако известные способы синхронизации предполагают предварительное квантование сигнала на два уровня, чем вносят дополнительные искажения, приводящие к потере информации, и не учитывают рекуррентных свойств M-последовательности по предсказанию значения очередного сигнала на основе ранее принятых сигналов, что приводит к увеличению времени синхронизации.
Известны устройства синхронизации M-последовательности, описанные, например, в книге: В.И.Журавлев "Поиск и синхронизация в широкополосных системах". -М.:Радио и связь. 1986, с.98. рис.3.7. Однако известные синхронизации предварительно квантуют сигнал на два уровня, чем вносят дополнительные искажения, приводящие к потере информации, и не учитывают рекуррентных свойств M-последовательности по предсказанию значения очередного сигнала на основе ранее принятых сигналов, что приводит к увеличению времени синхронизации.
Наиболее близким по своей сущности к заявленному способу синхронизации M-последовательности является известный способ, описанный в книге: В.И.Журавлев "Поиск и синхронизация в широкополосных системах". -М.: Радио и связь. 1986, с. 97. Способ-прототип синхронизации M-последовательности, заключающийся в разделении принятого информационного сигнала на две ветви обработки, временной задержки информационного сигнала в первой ветви, формировании оценочного сигнала и его задерживании во второй ветви, вычислении коэффициента корреляции между задержанной частью информационного сигнала первой ветви и оценочного значением информационного сигнала второй ветви, формировании управляющего сигнала и генерировании M-последовательности двоичных сигналов, с периодом (2n-1), где n - порядок порождающего полинома.
Недостатком прототипа заявленного способа является то, что информационный сигнал предварительно квантуют на два уровня, чем вносят дополнительные искажения, приводящие к потере информации, и не учитывают рекуррентных свойств M-последовательности по предсказанию значения очередного сигнала на основе ранее принятых сигналов, что приводит к увеличению времени синхронизации.
Наиболее близким по своей сущности к заявленному устройству синхронизации M-последовательности является устройство, показанное в книге: В.И. Журавлев "Поиск и синхронизация в широкополосных системах", -М.: Радио и связь. 1986, с. 98, рис. 3.7. Известное устройство-прототип включает блок формирования оценочных сигналов, каскадно соединенные по информационным входам линию задержки, коррелятор и устройство управления, выход которого подключен к первому управляющему входу регистра сдвига с обратными связями, выход которого является выходом устройства синхронизации.
Недостатком прототипа заявленного устройства является то, что информационный сигнал предварительно квантуют на два уровня, чем вносят дополнительные искажения, приводящие к потере информации, и не учитывают рекуррентных свойств M-последовательности по предсказанию значения очередного сигнала на основе ранее принятых по предсказанию значения очередного сигнала на основе ранее принятых сигналов, что приводит к увеличению времени синхронизации.
Целью изобретения заявленных технических решений является разработка способа синхронизации M-последовательности и устройства, его реализующего, обеспечивающих уменьшение времени синхронизации сложных сигналов.
Поставленная цель достигается тем, что в известном способе, заключающемся в разделении принятого информационного сигнала на две ветви обработки, временной задержке информационного сигнала в первой ветви, формировании оценочного сигнала и его задерживании во второй ветви, вычислении коэффициента корреляции между задержанной частью информационного сигнала первой ветви и оценочным значением информационного сигнала второй ветви, формировании управляющего сигнала и генерировании M-последовательности двоичных сигналов, с периодом (2n-1), где n - порядок порождающего полинома, принятый сигнал предварительно дискретизируют на k элементов, где k ≥ 2. Элементы дискретизированного сигнала разделяют на первые две ветви обработки, в первой ветви первого разделения элементы дискретизированного сигнала задерживают на время k×τ, а во второй ветви первого разделения последовательно, начиная с первого элемента дискретизированного сигнала, из каждого элемента вычитают предсказанное значение информационного сигнала. Полученный разностный сигнал умножают на весовой коэффициент, а затем умноженный сигнал суммируют с предсказанным значением информационного сигнала. Полученное оценочное значение сигнала задерживают на время τ, равное длительности одного элемента дискретизированного сигнала. Причем оценочное значение сигнала для k-го элемента дискретизированного сигнала разделяют на вторые две ветви обработки. В первой ветви второго разделения оценочное значение информационного сигнала преобразуют по рекуррентному правилу формирования M-последовательности, преобразованное значение оценочного сигнала разделяют на третьи две ветви обработки, в первой ветви преобразованное значение оценочного сигнала задерживают на время, равное k×τ×(n-1). Во второй ветви третьего разделения преобразованное значение оценочного сигнала квантуют на два уровня и задерживают на время, равное k×τ×n. Во второй ветви второго разделения оценочное значение информационного сигнала последовательно умножают на элементы дискретизированного информационного сигнала первой ветви первого разделения, задержанного на время k×τ, и полученные произведения суммируют. При достижении суммарным сигналом заданного порогового уровня формируют управляющий сигнал на начало генерации. Причем каждый сгенерированный сигнал M-последовательности последовательно умножают на элементы дискретизированного сигнала, задержанного на время k×τ, а полученные произведения суммируют, при превышении суммарным сигналом заданного порогового уровня генерацию продолжают, в противном случае генерацию прекращают. В качестве предсказанного значения информационного сигнала для первого элемента дискретизированного сигнала используют ранее полученное оценочное значение информационного сигнала, преобразованное по рекуррентному правилу формирования M-последовательности, задержанное на время, равное k×τ×(n-1) и умноженное на весовой коэффициент. А для i-го элемента (где i = 2,3,...k) в качестве предсказанного значения информационного сигнала используют оценочное значение сигнала, полученное для (i-1)-го элемента дискретизированного сигнала, задержанное на время τ, равное длительности одного элемента дискретизированного сигнала. Для преобразования оценочного значения информационного сигнала по рекуррентному правилу формирования M-последовательности его перемножают с (n-1) оценочными значениями информационных сигналов, полученных и записанных ранее и умноженных на соответствующий весовой коэффициент порождающего полинома. В качестве начальных условий для начала генерации M-последовательности используют преобразованные, квантованные, оценочные значения информационного сигнала, задержанные на время k×τ×n.
Указанная новая совокупность выполняемых действий за счет использования рекуррентных свойств M-последовательности по предсказанию значения очередного элемента сигнала на основе ранее принятых элементов сигналов и формирования оценочного сигнала без предварительного ограничения позволяет повысить вероятность правильного приема сложных сигналов и тем самым уменьшает время синхронизации M-последовательности.
Поставленная цель достигается тем, что в известном устройстве синхронизации M-последовательности, содержащем блок формирования оценочных сигналов, каскадно соединенные по информационным входам линию задержки, коррелятор и устройство управления, выход которого подключен к первому управляющему входу регистра сдвига с обратными связями, выход которого является выходом устройства синхронизации, дополнительно введены блок коммутации, выделитель тактовой частоты, квантователь и дискретизатор. Информационный вход дискретизатора в параллель соединен со входом выделителя тактовой частоты и является входом устройства синхронизации, а выход в параллель соединен с информационным входом линии задержки и с информационным входом блока формирования оценочного сигнала. Первый выход блока формирования оценочного сигнала соединен с первым информационным входом блока коммутации, а второй выход соединен со входом квантователя, выход которого соединен со вторым информационным входом блока коммутации. Первый выход блока коммутации соединен с информационным входом регистра сдвига с обратными связями, а второй выход соединен со вторым информационным входом коррелятора. Выход устройства управления в параллель соединен с управляющим входом блока коммутации и с первым управляющим входом регистра сдвига с обратными связями. Первый управляющий выход выделителя тактовой частоты в параллель соединен с управляющими входами дискретизатора, линии задержки, коррелятора и с первым управляющим входом блока формирования оценочного сигнала, а второй управляющий выход в параллель соединен со вторым управляющим входом регистра сдвига с обратными связями и со вторым управляющим входом блока формирования оценочного сигнала. Блок формирования оценочного сигнала состоит из первого и второго аналоговых сумматоров, первого и второго управляемых переключателей, линии задержки и накопителя. Первый выход накопителя соединен со входом первого умножителя на постоянный множитель, выход которого соединен с первым информационным входом первого управляемого переключателя. Управляющий вход первого управляемого переключателя в параллель соединен с управляющим входом второго управляемого переключателя и с управляющим входом накопителя и является вторым управляющим входом блока формирования оценочного сигнала, а выход первого управляемого переключателя в параллель соединен со вторым информационным входом второго аналогового сумматора и с первым информационным входом первого аналогового сумматора. Второй информационный вход первого аналогового сумматора является информационным входом блока формирования оценочного сигнала, а выход соединен со входом второго умножителя на постоянный множитель, выход которого соединен с первым информационным входом второго аналогового сумматора. Выход второго аналогового сумматора в параллель соединен со входом линии задержки и с информационным входом второго управляемого переключателя. Управляющий вход линии задержки является первым управляющим входом блока формирования оценочного сигнала, а выход линии задержки соединен со вторым информационным входом первого управляемого переключателя. Выход второго управляемого переключателя является первым информационным выходом блока формирования оценочного сигнала и соединен с информационным входом накопителя, второй выход которого является вторым информационным выходом блока формирования оценочного сигнала.
Указанная новая совокупность признаков заявленного устройства синхронизации за счет использования рекуррентных свойств M-последовательности по предсказанию значения очередного сигнала на основе ранее принятых элементов сигналов и формирования оценочного сигнала без предварительного ограничения позволяет повысить вероятность правильного приема сложных сигналов и тем самым уменьшает время синхронизации M-последовательности.
Проведенный заявителем анализ уровня техники позволяет установить, что аналоги, характеризующиеся совокупностями признаков, тождественным всем признакам заявленных способа и устройства синхронизации, отсутствуют. Следовательно, каждое из заявленных изобретений соответствует условию патентоспособности "Новизна".
Результаты поиска известных решений в данной и смежных областях техники с целью выявления признаков, совпадающих с отличительными от прототипов признаками каждого заявленного изобретения, показали, что они не следуют явным образом из уровня техники. Из определенного заявителем уровня техники не выявлена известность влияния предусматриваемых существенными признаками каждого из заявленных изобретений на достижение указанного технического результата. Следовательно, каждое из заявленных изобретений соответствует условию патентоспособности "Изобретательский уровень".
Заявленные объекты изобретения поясняются чертежами, на которых:
- на фиг. 1,2,3,4 - осциллограммы, поясняющие суть предлагаемого способа синхронизации M-последовательности;
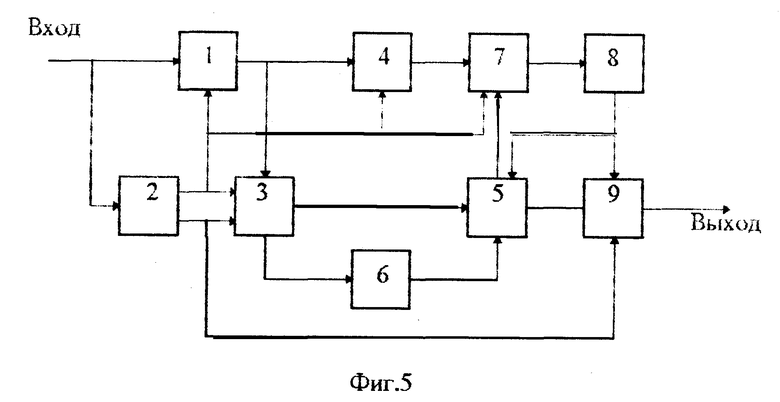
- на фиг. 5 - структурная схема устройства синхронизации M-последовательности;
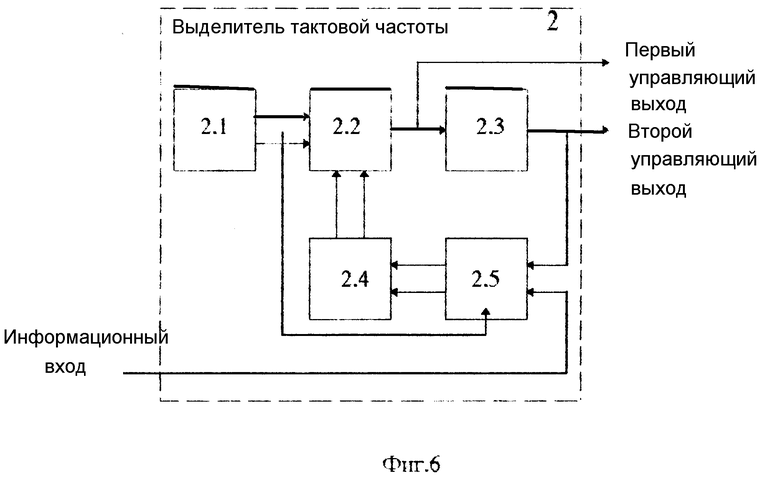
- на фиг.6 - структурная схема выделителя тактовой частоты 2;
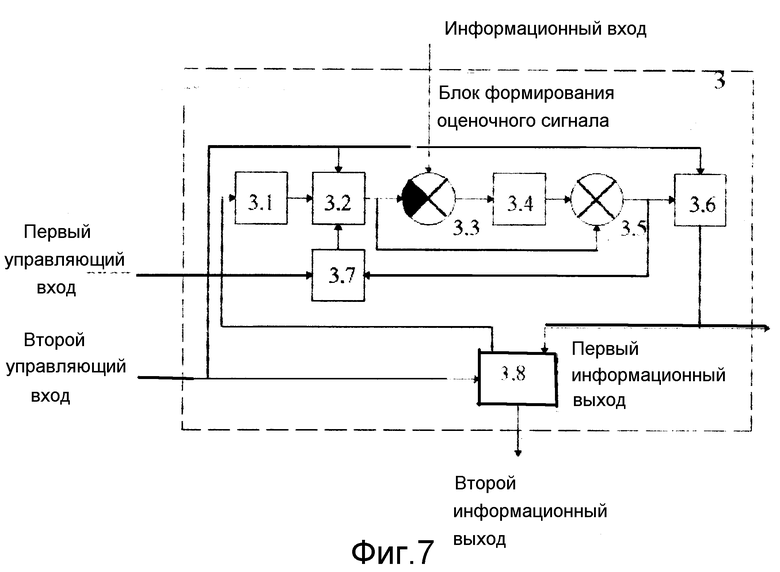
- на фиг.7 - структурная схема блока формирования оценочного сигнала 3;
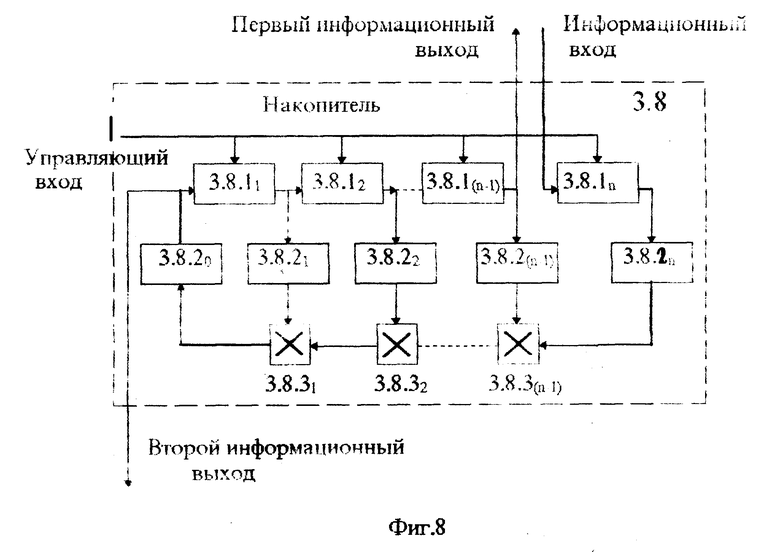
- на фиг.8 - структурная схема накопителя 3.8;
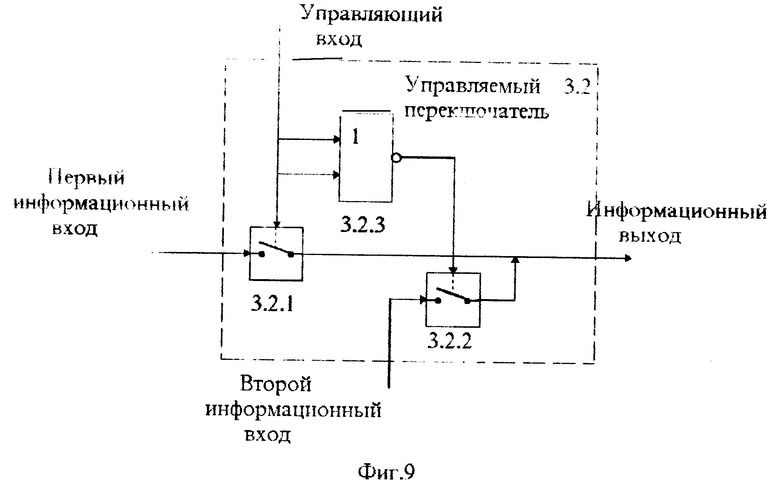
- на фиг. 9 - структурная схема первого управляемого переключателя, в блоке формирования оценочного сигнала 3.2;
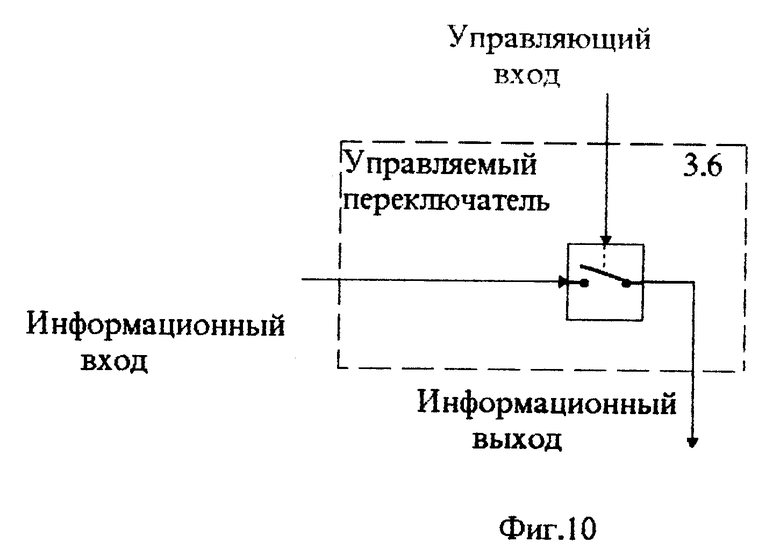
- на фиг. 10 - схема подключения второго управляемого переключателя, в блоке формирования оценочного сигнала 3.6;
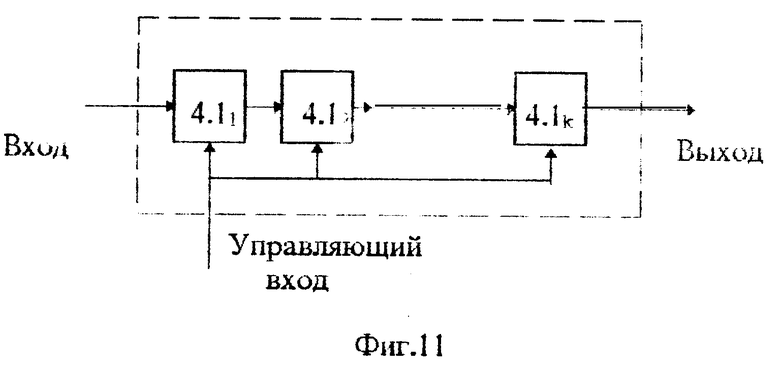
- на фиг.11 - структурная схема линии задержки 4;
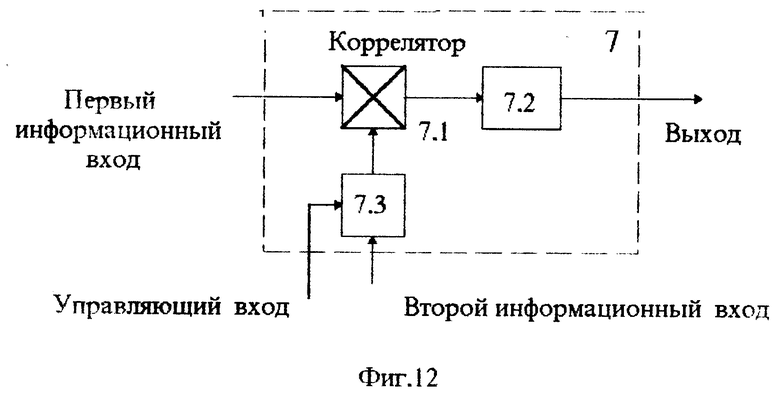
- на фиг.12 - структурная схема коррелятора 7;
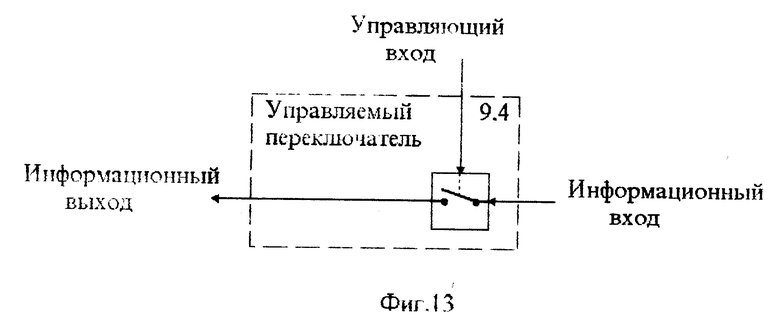
- на фиг. 13 - схема подключения управляемого переключателя в регистре сдвига с обратными связями 9.4;
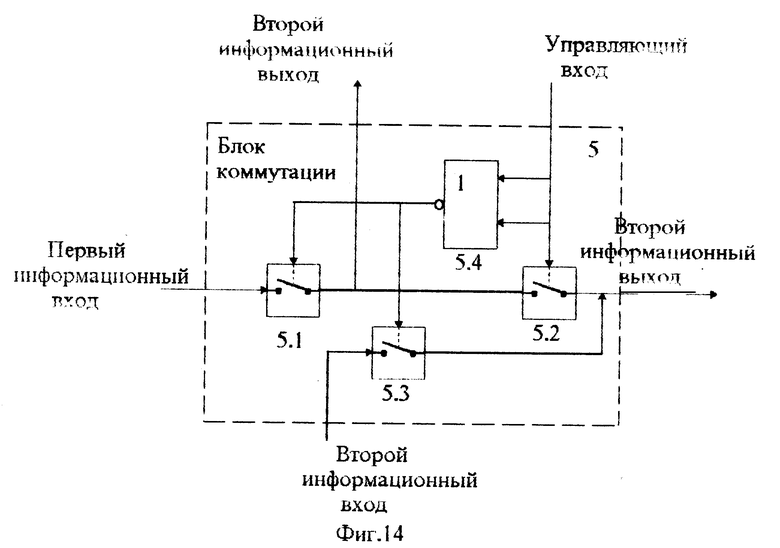
- на фиг.14 - структурная схема блока коммутации 5;
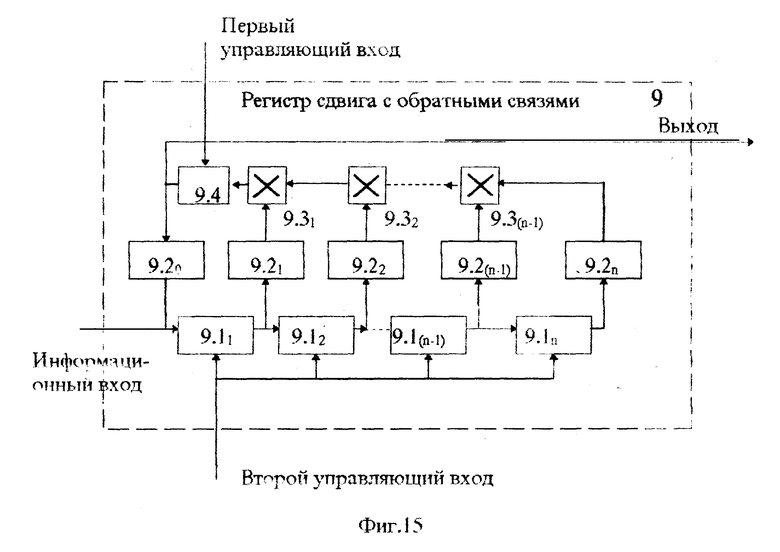
- на фиг.15 - структурная схема регистра сдвига с обратными связями 9;
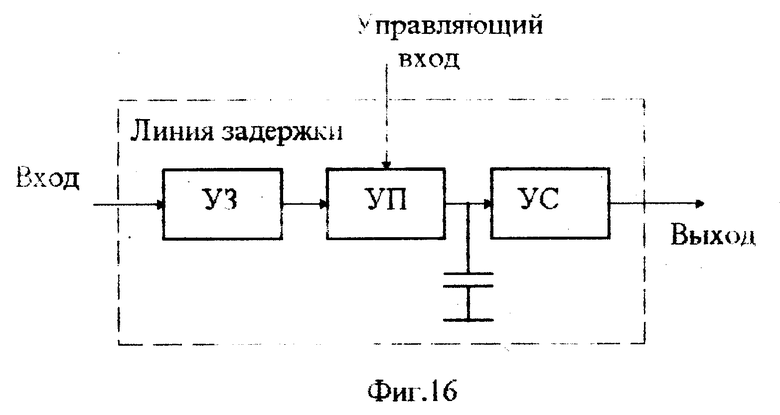
- на фиг.16 - структурная схема линии задержки;
- на фиг.17, 18 - графики, показывающие эффект заявленного способа.
Реализация заявленного способа заключается в следующем. При использовании сложных сигналов большое значение имеет частотно-временное согласование параметров. Процесс синхронизации может занимать достаточно большое время в зависимости от периода используемых псевдошумовых сигналов и их корреляционные свойства. Для формирования сложных сигналов широко применяют кодовые последовательности Хаффмана, которые называют еще M-последовательностями, последовательностями максимальной длины, псевдослучайными последовательностями. Рекуррентное правило формирования M-последовательности можно представить в виде рекуррентной формулы:
где dj - j-й элемент M- последовательности, образуемый сложением по модулю 2 некоторого числа предшествующих элементов, хранящихся в регистре, а именно тех из них, коэффициенты при которых равны 1.
Однако период M-последовательности, равный L=2n-1, где n - порядок порождающего полинома, может оказаться по времени больше, чем время сеанса связи, что значительно осложняет процесс установления синхронизации и, соответственно, значительно увеличивает время установления синхронизации M-последовательности. Кроме того, при использовании известных способов синхронизации отношение сигнал/шум на входе приемника оказывает большое влияние на время синхронизации.
Известно широкое применение генераторов M-последовательности на основе цифровых регистров сдвига с обратными связями. Подобные генераторы оперируют нулями и единицами, а в качестве преобразователя сигнала в регистре сдвига с обратными связями используют сумматоры по модулю два. Однако если произвести замену
а сумматоры по модулю два заменить на аналоговые умножители, то на выходе регистра сдвига с обратными связями можно получить последовательности сигналов, отличающихся по знаку. Такая последовательность обладает рекуррентными и корреляционными свойствами, как и цифровая M-последовательность. Однако использование аналоговых M-последовательностей дает ряд преимуществ при обработке искаженных сложных сигналов, за счет того, что нет необходимости внесения дополнительных искажений при квантовании сигнала.
Отрезок M-последовательности на передающей стороне имеет вид, представленный на фигуре 1(а). В процессе передачи сигналы искажаются под воздействием шумов и помех. На приемной стороне искаженный сигнал имеет вид, например, как показано на фигуре 1(б).
Из принимаемой смеси сигнала и шума с помощью известных способов выделяют тактовую частоту (Ft). Известны способы выделения тактовой частоты описаны, например, в книге: Е.М.Мартынов "Синхронизация в системах передачи дискретных сообщений". -М. : Связь, 1972, стр.107. Стробирующие импульсы с тактовой частотой информационных сигналов показаны на фигуре 1(в). Период следования импульсов с тактовой частотой равен T=1/Ft.
Используя известные способы деления частоты, получают частоту, в k раз превышающую тактовую fd=k • Ft, где k - количество дискретизированных отсчетов на длительности одного информационного сигнала. Значение k выбирают в пределах от 2 до 10, так как при k=1 получают вырожденный случай и эффект улучшения оценивания не наблюдается, при k > 10 значительно увеличивается время оценивания сигнала, а точность оценивания практически не увеличивается. Известные способы деления частоты описаны, например, в книге: М.Л.Лейнов, В.С.Качалуба, А.В.Рыжков "Цифровые делители частоты на логических элементах". -М. : Энергия. 1975, стр.93. Стробирующие импульсы с частотой, в k раз превышающей тактовую, показаны на фигуре 1(г). Период следования импульсов с частотой, в k раз превышающей тактовую, равен τ = 1/fd.
С целью избежания внесения дополнительных искажений принимаемый сигнал на входе демодулятора не квантуют на два уровня, а дискретизируют с частотой fd. Известные способы дискретизации сигналов описаны, например, в книге: Ж. Маркюс "Дискретизация и квантование". - М.: Энергия. 1969, стр. 45. Аналоговые дискретизированные отсчеты принятого сигнала показаны на фигуре 1 (д). После дискретизации каждый отсчет аналогового сигнала разделяют на первые две ветви обработки. В первой ветви первого разделения элементы дискретизированного информационного сигнала задерживают на время, равное периоду следования информационных сигналов T, а во второй ветви формируют оценочное значение информационного сигнала. Способы задерживания сигналов известны и описаны, например, в книге: И.А. Цыкин "Дискретно-аналоговая обработка сигналов". - М.: Радио и связь. 1982, стр. 19.
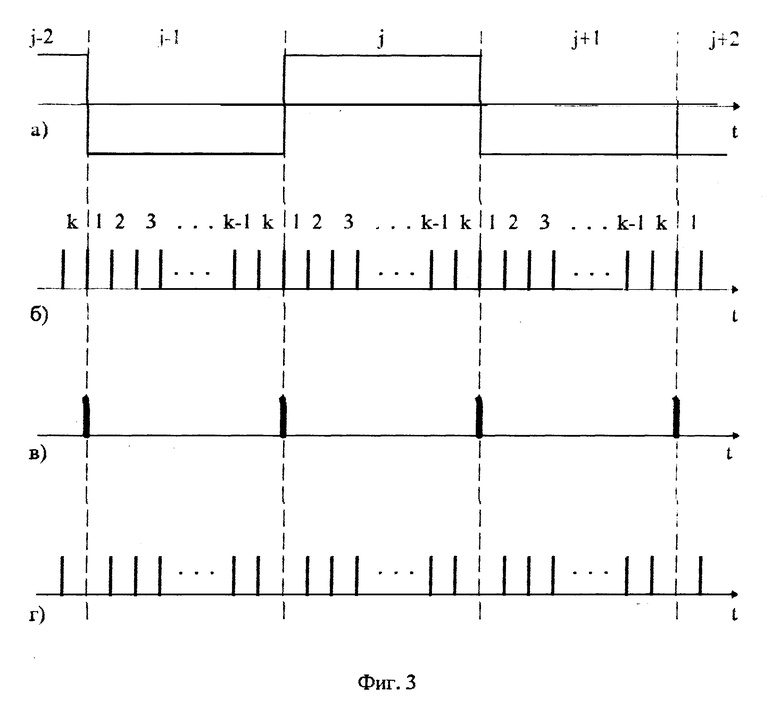
С целью наиболее точной оценки искаженного информационного сигнала различают обработку при смене тактовых интервалов информационного сигнала и внутри тактовых интервалов информационного сигнала. Последовательность информационных сигналов показана на фигуре 3(a). Частота дискретизации в k раз выше тактовой частоты информационных сигналов показана на фигуре 3(б).
В моменты смены тактовых интервалов формируют оценочное значение информационного сигнала на первом дискретизированном отсчете смеси сигнала и шума. Моменты смены тактовых интервалов показаны на фигуре 3(в). Для формирования оценочного значения информационного сигнала на первом дискретизированном отсчете смеси сигнала и шума используют умноженное на весовой коэффициент C2, предсказанное значение информационного сигнала, которое является преобразованным по рекуррентному правилу формирования M-последовательности, оценочным значением информационного сигнала, принятого и оцененного на (n - 1) тактов ранее. Эксперименты показали, что коэффициент C2 целесообразно выбирать в пределах от 0.1 до 0.5. В случае первоначального установления синхронизации в качестве предсказанного значения могут быть использованы произвольные начальные условия или значения оставшиеся от прошлого сеанса связи. Для формирования оценочного значения из первого дискретизированного отсчета смеси сигнала и шума вычитают умноженное на весовой коэффициент C2, предсказанное значение информационного сигнала. Дискретизированные значения отсчетов смеси сигнала и шума показаны на фигуре 1(д). Полученную разность умножают на весовой коэффициент C1 и суммируют с тем же, умноженным на весовой коэффициент C2, предсказанным значением информационного сигнала. Эксперименты показали, что коэффициент C1 целесообразно выбирать в пределах от 0.5 до 1. Известные способы сложения сигналов описаны, например, в книге: А. А. Сикарев, О.Н. Лебедев "Микроэлектронные устройства формирования и обработки сложных сигналов". - М.: Радио и связь. 1983, стр. 194. По физической сущности умножению сигнала на постоянный множитель соответствует усиление сигнала. Известные способы усиления сигналов описаны, например, в книге: А.А. Сикарев, О.Н. Лебедев "Микроэлектронные устройства формирования и обработки сложных сигналов". - М.: Радио и связь. 1983, стр. 184. После чего оценочное значение информационного сигнала, полученное на первом дискретизированном отсчете смеси сигнала и шума, задерживают на время τ , равное длительности дискретизированного отсчета. Способы задерживания сигналов известны и описаны, например, в книге: И.А. Цыкин "Дискретно-аналоговая обработка сигналов". - М.: Радио и связь. 1982, стр. 19. Оценочные значения информационного сигнала, полученные на каждом дискретизированном отсчете смеси сигнала и шума, показаны на фигуре 1 (е).
В моменты времени внутри тактовых интервалов формируют оценочное значение информационного сигнала из дискретизированных отсчетов смеси сигнала и шума, начиная со второго и до k-го. Моменты времени внутри тактовых интервалов показаны на фигуре 3 (г).
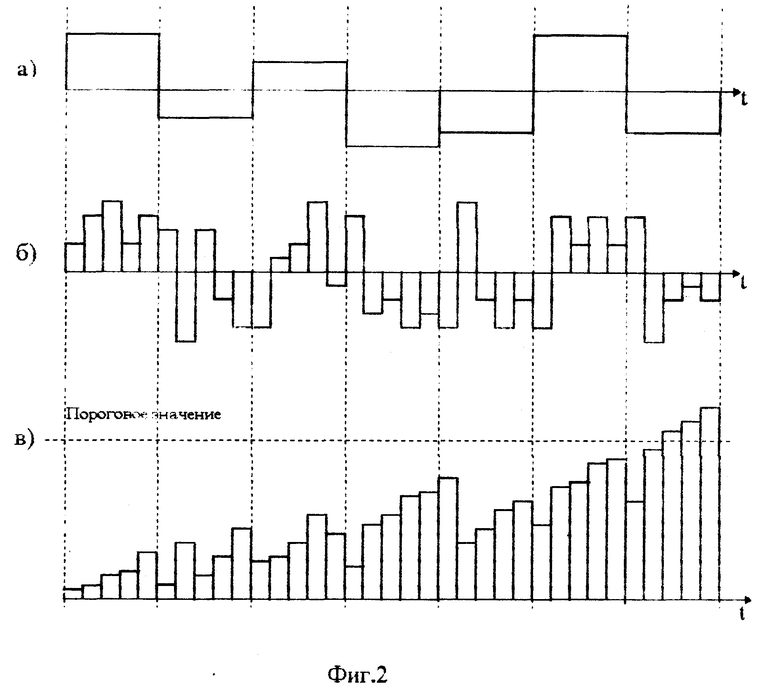
Для формирования оценочного значения информационного сигнала из последующих дискретизированных отсчетов смеси сигнала и шума, начиная со второго и до k-го, используют оценочное значение информационного сигнала, полученное из предыдущего дискретизированного отсчета смеси сигнала и шума, которое является уточненным значением предсказанного значения информационного сигнала. Для формирования оценочного значения сигнала из дискретизированных отсчетов смеси сигнала и шума, начиная со второго и до k-го, вычитают оценочное значение информационного сигнала, полученное из предыдущего дискретизированного отсчета. Затем полученную разность умножают на весовой коэффициент C1 и суммируют с тем же оценочным значением информационного сигнала, полученным из предыдущего дискретизированного отсчета информационного сигнала. Известные способы сложения сигналов описаны, например, в книге: А.А. Сикарев, О. Н. Лебедев "Микроэлектронные устройства формирования и обработки сложных сигналов". - М.: Радио и связь. 1983, стр. 194. По физической сущности умножению сигнала на постоянный множитель соответствует усиление сигнала. Известные способы усиления сигналов описаны, например, в книге: А.А. Сикарев, О. Н. Лебедев "Микроэлектронные устройства формирования и обработки сложных сигналов". - М.: Радио и связь. 1983, стр. 184. Полученное оценочное значение сигнала из каждого, начиная с первого и до (k - 1)-го, дискретизированного отсчета задерживают на время τ , равное длительности дискретизированного отсчета, для использования в дальнейшей оценке информационного сигнала. Способы задерживания сигналов известны и описаны, например, в книге: И.А. Цыкин "Дискретно-аналоговая обработка сигналов". - М.: Радио и связь. 1982, стр. 19. Полученное из k-го дискретизированного отсчета оценочное значение информационного сигнала считают оценочным значением информационного сигнала в целом. Оценочные значения информационных сигналов показаны на фигуре 2(a). Для оценки следующего информационного сигнала все описанные выше операции повторяют.
В аналитической форме данные действия можно записать следующим образом.
где: Si - i-й дискретизированный отсчет смеси сигнала и шума (где i = 1. ..k);
P - предсказанное значение информационного сигнала;
S
C1, C2 - весовые коэффициенты.
Эксперименты показали, что коэффициент C1 целесообразно выбирать в пределах от 0.5 до 1.0, а коэффициент C2 целесообразно выбирать в пределах от 0.1 до 0.5.
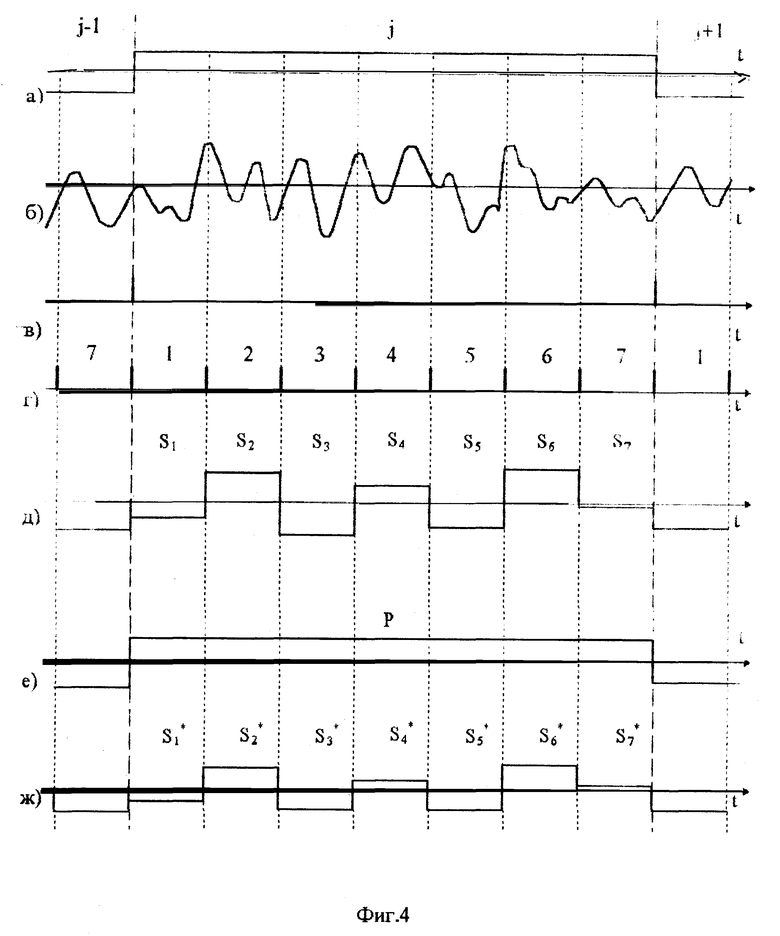
На фигуре 4 показаны временные диаграммы, поясняющие принцип получения оценочного значения информационного сигнала. На фигуре 4 (а) показан j-й информационный сигнал без искажений. На фигуре 4 (б) показан j-й информационный сигнал, искаженный под воздействием шумов и помех. На фигуре 4 (в) показаны стробирующие импульсы с периодом, равным периоду следования информационных сигналов. На фигуре 4 (г) показаны стробирующие импульсы с периодом, равным периоду следования дискретизированных отсчетов информационного сигнала. На фигуре 4 (д) показаны дискретизированные отсчеты информационного сигнала. Шумы и помехи не позволяют получить истинное значение информационного сигнала, используя известные способы обработки сигналов. Однако можно предположить, что имеется предсказанное значение информационного сигнала, по знаку равное истинному значению информационного сигнала, которое может быть получено путем преобразования по рекуррентному правилу формирования M-последовательности оценочных значений сигналов, ранее принятых и правильно оцененных. На фигуре 4 (е) показано предсказанное значение информационного сигнала. На фигуре 4 (ж) показаны оценочные значения информационного сигнала, полученные на каждом дискретизированном отсчете информационного сигнала. Оценочное значение информационного сигнала, полученное на k-м дискретизированном отсчете информационного сигнала, считается оценочным значением информационного сигнала в целом. Знак сигнала соответствует знаку истинного информационного сигнала, это означает, что оценка сигнала сделана правильно. Таким образом происходит исправление ошибочного информационного сигнала. Оценочное значение информационного сигнала после преобразования по рекурентному правилу формирования M- последовательности будет использовано как предсказанное значение для (j + n)-го информационного сигнала, где n - порядок порождающего полинома M-последовательности.
С целью определения правильности сделанных оценок вычисляют коэффициент корреляции между полученным оценочным значением информационного сигнала, показанного на фигуре 2(а), и каждым значением дискретизированных отсчетов оцененного информационного сигнала, задержанных на время T, равное длительности информационного сигнала, показанных на фигуре 2(б). Полученные значения коэффициентов суммируют. Суммарные значения, полученные при вычислении коэффициентов корреляции, показаны на фигуре 2(в). Суммирование продолжается на протяжении не менее чем n тактов, до тех пор пока не будет превышен заданный порог. Значение порога суммирования задают в зависимости от отношения сигнал/шум на входе приемника.
Кроме того, оценочные значения информационных сигналов после преобразования по рекуррентному правилу квантуют на два уровня "+1" или "-1", а потом задерживают на время, равное T • n.
В случае, когда суммарное значение коэффициента корреляции превысит заданный порог, подают управляющее воздействие на начало генерации М-последовательности. Способы формирования управляющего воздействия при превышении заданного порога известны и описаны, например, в книге: А.А.Сикарев, О.Н.Лебедев "Микроэлектронные устройства формирования и обработки сложных сигналов".-М.: Радио и связь. 1983, стр. 203.
В качестве начальных условий для генерации М- последовательности используют квантованные оценочные значения информационных сигналов, задержанные на время T • n. При этом получение оценочных значений информационных сигналов, их преобразование по рекуррентному правилу формирования М- последовательности и задерживание преобразованных значений на время, равное T (n-1), продолжают. Это позволит в дальнейшем получать более точную априорную информацию о значениях принимаемых сигналов. Структура генератора М-последовательности на приемной стороне должна соответствовать структуре генератора М- последовательности на передающей стороне. Если оценочные значения n информационных сигналов соответствовали истинным значениям n информационных сигналов, то сгенерированная М- последовательность будет синхронна с принимаемой.
При начале генерации М-последовательности вычисляют коэффициент корреляции между сгененированным значением М-последовательности и каждым значением дискретизированных отсчетов сигнала, задержанных на время T, равное длительности информационного сигнала. Способы формирования М- последовательности известны и приведены, например, в книге: А.А.Сикарев, О.Н.Лебедев "Микроэлектронные устройства формирования и обработки сложных сигналов". -М. : Радио и связь. 1983, стр. 149. Значение сумматора, накопленное за время до превышения порога, не обнуляют, а суммируют со значениями коэффициента корреляции, полученными после начала генерации.
В случае, если суммарное значение коэффициента корреляции будет не ниже значения коэффициента корреляции, при котором была начата генерация М-последовательности, то принимают решение об установлении истинного синхронизма и генерацию продолжают.
В случае, если суммарное значение коэффициента корреляции будет ниже значения коэффициента корреляции, при котором была начата генерация М-последовательности, то принимают решение об установлении ложного синхронизма, генерацию прекращают, а значение сумматора обнуляют. После этого предпринимается очередная попытка установления синхронизма и выполняют все описанные выше действия, но в качестве предсказанных сигналов используют преобразованные по рекуррентному правилу оценочные значения информационных сигналов, полученные за текущий сеанс связи. Это позволяет сократить время при повторной попытке установления синхронизации М- последовательности.
Возможность исправления информационного сигнала повышает вероятность (p) правильного приема сигнала. Для генерации М- последовательности, синхронной с принимаемой, необходимо без ошибок принять не менее n сигналов подряд. Следовательно, вероятность установления синхронизации при использовании заявленного способа синхронизации М-последовательности
P
При использовании предложенного способа синхронизации М- последовательности, для которого n > 50, даже малое увеличение вероятности правильного приема приводит к значительному увеличению вероятности установления синхронизации. Соответственно, значительно сокращается время установления синхронизации. Кроме того, применение данного способа позволит принимать сложные сигналы при отношениях сигнал/шум меньше единицы.
На основе заявляемого способа синхронизации М-последовательности был получен алгоритм обработки сложных сигналов и написана программа обработки сложных сигналов на ПЭВМ. В результате выполнения программы были получены результаты, представленные в виде графиков на фигуре 17. На фигуре 17 показана зависимость вероятности правильного приема одного элемента сложного сигнала от отношения сигнал/шум (h2 ) на входе демодулятора. График (а) построен для случая использования заявленного способа синхронизации, а график (б) для случая использования способа синхронизации по зачетному отрезку. Анализируя график можно сделать вывод, что использование заявленного способа синхронизации М- последовательности дает наибольшее улучшение вероятности правильного приема при отношении сигнал/шум от 0.1 до 1.0. Так как время установления синхронизации зависит от вероятности установления синхронизации, то эффективность заявляемого способа можно выразить коэффициентом улучшения времени синхронизации (Ky) при использовании заявленного способа относительно способа синхронизации по зачетному отрезку.
Kу= P
где P
Pc - вероятность установления синхронизации при использовании способа синхронизации М- последовательности по зачетнмоу отрезку.
На фигуре 18 показана зависимость коэффициента улучшения от порядка порождающего полинома, на основе которого строится генератор М- последовательности. Анализируя график, можно сделать вывод, что использование заявляемого способа синхронизации М- последовательности наиболее эффективно для длинных М- последовательностей.
Устройство синхронизации М- последовательности, показанное на фигуре 5, состоит из дискретизатора 1, выделителя тактовой частоты 2, блока формирования оценочного сигнала 3, линии задержки 4, блока коммутации 5, квантователя 6, коррелятора 7, устройства управления 8 и регистра сдвига с обратными связями 9. Выход устройства синхронизации М- последовательности в параллель соединен с информационными входами дискретизитора 1 и выделителя тактовой частоты 2. Информационный выход дискретизатора 1 в параллель соединен с информационными входами блока формирования оценочного сигнала 3 и линии задержки 4. Первый информационный выход блока формирования оценочного сигнала 3 соединен с первым информационным входом блока коммутации 5, а второй информационный выход блока формирования оценочного сигнала 3 соединен с входом квантователя 6, выход которого соединен со вторым информационным входом коммутатора 5. Выход линии задержки 4 соединен с первым информационным входом коррелятора 7, выход которого соединен с входом устройства управления 8. Управляющий выход устройства управления 8 в параллель соединен с управляющими входами коммутатора 5 и регистра сдвига с обратными связями 9. Первый информационный выход коммутатора 5 соединен с информационным входом регистра сдвига с обратными связями 9, а второй информационный выход коммутатора 5 соединен со вторым информационным входом коррелятора 7. Первый управляющий выход выделителя тактовой частоты 2 в параллель соединен с управляющими входами дискретизатора 1, линии задержки 4, коррелятора 7 и с первым управляющим входом блока формирования оценочного сигнала 3. Второй управляющий выход выделителя тактовой частоты 2 в параллель соединен со вторым управляющим входом блока формирования оценочного сигнала 3 и со вторым управляющим входом коммутатора 5. Выход регистра сдвига с обратными связями 9 является выходом устройства синхронизации М-последовательности.
Дискретизатор 1 предназначен для дискретизации информационного сигнала с частотой, в k раз превышающей тактовую частоту информационных сигналов (fd= k×Fτ), где k - количество необходимых дискретизированных отсчетов на длительности одного информационного сигнала. По физической сущности дискретизатор 1 является прерывателем. Схемы прерывателей, которые можно использовать в качестве дискретизатора 1, известны и приведены, например, в книге: Ж. Маркюс. "Дискретизация и квантование". - М.: Энергия, 1969, стр. 52, рис. 2.11.
Выделитель тактовой частоты 2, показанный на фигуре 6, предназначен для выделения тактовой частоты (Fτ) и частоты дискретизации (fd) из информационного сигнала. По физической сущности схема выделителя тактовой частоты 2 соответствует схеме фазового дискриминатора. Схеме фазового дискриминатора, который может быть использован в устройстве синхронизации М-последовательности, известна и приведена, например, в книге Е.М. Мартынова "Синхронизация в системах передачи дискретных сообщений". - М.: Связь. 1972, стр. 108, рис. 6.16. С учетом особенностей заявленного устройства схема выделителя тактовой частоты 2 может быть реализована, как показано на фигуре 6. Выделитель тактовой частоты 2 состоит из задающего генератора 2.1, управляющего элемента 2.2, делителя частоты 2.3, усредняющего устройства 2.4 и фазового дискриминатора 2.5. Информационный вход фазового дискриминатора 2.5 является информационным входом выделителя тактовой частоты 2. Первый и второй управляющий выход фазового дискриминатора 2.5 соединены соответственно с первым и вторым управляющими входами усредняющего устройства 2.4, первый и второй управляющий выход которого соединены соответственно с первым и вторым управляющими входами управляющего элемента 2.2. Первый управляющий выход задающего генератора 2.1 соединен с третьим управляющим входом управляющего элемента 2.2, а второй управляющий выход задающего генератора 2.1 в параллель соединен с четвертым управляющим входом управляющего элемента 2.2 и с первым управляющим входом фазового дискриминатора 2.5. Управляющий выход управляющего элемента 2.2 соединен с управляющим входом делителя частоты 2.3 и является первым управляющим выходом выделителя тактовой частоты 2. Управляющий выход делителя частоты соединен со вторым управляющим входом фазового дискриминатора 2.5 и является вторым управляющим выходом выделителя тактовой частоты 2.
Блок формирования оценочного сигнала 3, показанный на фигуре 7, предназначен для формирования оценочного значения информационного сигнала, искаженного под воздействием шумов и помех. Он состоит из первого и второго управляемых переключателей 3.2 и 3.5, первого и второго аналоговых сумматоров 3.3 и 3.5, линии задержки 3.7 и накопителя 3.8. Первый информационный выход накопителя 3.8 соединен со входом первого умножителя на постоянный множитель 3.1, выход которого соединен с первым информационным входом первого управляемого переключателя 3.2. Управляющий вход первого управляемого переключателя 3.2 в параллель соединен с управляющим входом второго управляемого переключателя 3.6 и с управляющим входом накопителя 3.8, и является вторым управляющим входом блока формирования оценочного сигнала 3. Выход первого управляемого переключателя 3.2 в параллель соединен со вторым информационным входом второго аналогового сумматора 3.5 и с первым информационным входом первого аналогового сумматора 3.3. Второй информационный вход первого аналогового сумматора 3.3 является информационным входом блока формирования оценочного сигнала 3, а выход соединен со входом второго умножителя на постоянный множитель 3.4, выход которого соединен с первым информационным входом второго аналогового сумматора 3.5. Выход второго аналогового сумматора 3.5 в параллель соединен со входом линии задержки 3.7 и с информационным входом второго управляемого переключателя 3.6. Управляющий вход линии задержки 3.7 является первым управляющим входом блока формирования оценочного сигнала 3, а выход линии задержки 3.7 соединен со вторым информационным входом первого управляемого переключателя 3.2. Выход второго управляемого переключателя 3.6 является первым информационным выходом блока формирования оценочного сигнала 3 и соединен с информационным входом накопителя 3.8, второй выход которого является вторым информационным выходом блока формирования оценочного сигнала 3. Схемы аналоговых сумматоров, которые могут быть использованы в блоке формирования оценочного сигнала, известны и приведены, например, в книге: А.А. Сикарев, О.Н. Лебедев "Микроэлектронные устройства формирования и обработки сложных сигналов". - М.: Радио и связь. 1983, стр. 194, рис. 7.6. Схемы умножителей на постоянный множитель 3.1 и 3.4 по физической сущности являются не инвертирующими усилителями. Схемы не инвертирующих усилителей известны и приведены, например, в книге: Ю.А. Мячин "180 аналоговых микросхем (справочник)". - М. : издательство Патриот, МП Символ-Р и редакция журнала Радио, 1993, стр. 7.
Накопитель 3.8, показанный на фигуре 8, предназначен для задерживания оценочных значений информационного сигнала и их преобразования в соответствии с рекуррентным правилом порождающего полинома. По физической сущности схеме накопителя 3.8 соответствует схема устройства формирования М-последовательности. Схемы устройств формирования М-последовательностей известны и приведены, например, в книге: А.А. Сикарев, О.Н. Лебедев "Микроэлектронные устройства формирования и обработки сложных сигналов". - М.: Радио и связь. 1983, стр. 152, рис. 6.1. Накопитель 3.8 состоит из n линий задержки 3.8.11. . . 3.8.1n, (n+1) умножителей на постоянный множитель 3.8.20. ..3.8.2n, (n-1) аналоговых перемножителей 3.8.31...3.8.3(n-1), где n - порядок порождающего полинома. Управляющий вход накопителя 3.8 в параллель соединен с управляющими входами всех линий задержек 3.8.11...3.8.1n. Выход i-й линии задержки 3.8.1i, где i - 1...(n-2), в параллель соединен со входами i-го умножителя на постоянный множитель 3.8.2i и с информационными входами (i+1)-й линии задержки 3.8.1(i+1). Выход (n-1) линии задержки 3.8.1(n-1) соединен со входом (n-1) умножителя на постоянный множитель 3.8.2(n-1) и является первым информационным выходом накопителя 3.8. Вход n-й линии задержки 3.8.1n является информационным входом накопителя 3.8, а выход соединен со входом n-го умножителя на постоянный множитель 3.8.2n. Выход j-го умножителя на постоянный множитель 3.8.2j, где j=1...(n-1), соединен с первым входом j-го аналогового перемножителя 3.8.3j. Выход n-го умножителя на постоянный множитель 3.8.2n соединен со вторым входом (n-1)-го аналогового перемножителя. Второй вход i-го аналогового перемножителя 3.8.3i, где i=1...(n-2), соединен с выходом (i+1)-го аналогового перемножителя 3.8.3(i+1), а выход первого аналогового перемножителя 3.8.31 соединен со входом нулевого умножителя на постоянный множитель 3.8.2о и является вторым информационным выходом накопителя 3.8. Схемы аналоговых перемножителей, которые могут быть использованы в накопителе, известны и приведены, например, в книге: А.А. Сикарев, О.Н. Лебедев "Микроэлектронные устройства формирования и обработки сложных сигналов". - М.: Радио и связь. 1983, стр. 200, рис. 7.11. Схемы умножителей на постоянный множитель 3.1. и 3.4 по физической сущности являются не инвертирующими усилителями. Схемы не инвертирующих усилителей известны и приведены, например, в книге: Ю.А. Мячин "180 аналоговых микросхем, справочник". - М.: издательство Патриот, МП Символ-Р и редакция журнала Радио, 1993, стр. 7.
Первый управляемый переключатель 3.2, показанный на фигуре 9, предназначен для регулировки поступления опорного сигнала при получении оценочных значений дискретных отсчетов информационного сигнала. С учетом особенностей заявленного устройства управляемый переключатель 3.2 может быть реализован, как показано на фигуре 9. Управляемый переключатель 3.2 содержит первый элементарный управляемый переключатель 3.2.1, второй управляемый переключатель 3.2.2 и инвертор. Первый информационный вход управляемого переключателя 3.2 соединен с информационным входом первого элементарного управляемого переключателя 3.2.1, выход которого в параллель соединен с выходом второго элементарного управляемого переключателя 3.2.2 и является информационным выходом управляемого переключателя 3.2. Информационный вход второго элементарного управляемого переключателя 3.2.2 является вторым информационным входом управляемого переключателя 3.2. Управляющий вход управляемого переключателя 3.2 в параллель соединен с управляющим входом первого элементарного управляемого переключателя 3.2.1 и с первым и вторым входами инвертора 3.2.3, выход которого соединен с управляющим входом второго элементарного управляемого переключателя 3.2.1. Схемы управляемых элементарных переключателей известны и приведены, например, в книге: В.Л. Шило "Популярные микросхемы КМОП, справочник". - М.: Ягуар. 1993, стр. 22. Инвертор по своей физической сущности соответствует схеме базового элемента ИЛИ-НЕ. Схемы подобных элементов известны и приведены, например, в книге: В.Л. Шило "Популярные микросхемы КМОП, справочник". - М.: Ягуар, 1993, стр. 14.
Второй управляемый переключатель 3.6, показанный на фигуре 10, предназначен для того, чтобы производить запись в накопитель только оценочного значения информационного сигнала, полученного на k-м дискретизированном отсчете информационного сигнала. По своей физической сущности второй управляемый переключатель представляет собой элементарный двухпозиционный управляемый переключатель. Схемы управляемых элементарных переключателей известны и приведены, например, в книге: В.Л. Шило "Популярные микросхемы КМОП, справочник". - М.: Ягуар, 1993, стр. 22.
Линия задержки 4, показанная на фигуре 11, предназначена для задерживания дискретных отсчетов информационного сигнала на время, равное периоду следования информационных символов Т. Линия задержки 4 состоит из k линий задержки 4.1.1...4.1k на время, равное периоду следования дискретных отсчетов информационного сигнала τ, где k - число дискретных отсчетов на длительности одного информационного сигнала. Вход линии задержки 4 является информационным входом линии задержки 4.11, выход которой является информационным входом последующей линии задержки 4.1. Выход k-й линии задержки является выходом линии задержки 4. Информационные входы линий задержки 4.1 в параллель соединены с управляющим входом линии задержки 4. Описание схемы линии задержки смотри ниже.
Блок коммутации 5, показанный на фигуре 14, предназначен для переключения режимов работы устройств синхронизации М - последовательности при поиске синхронизации и в режиме генерации. Блок коммутации 5 состоит из трех элементарных управляемых переключателей 5.1, 5.2, 5.3 и инвертора. Информационный вход первого элементарного управляемого переключателя 5.1 является первым информационным входом блока коммутации 5, а выход соединен с информационным входом второго элементарного управляемого переключателя 5.2 и является вторым информационным выходом блока коммутации 5. Выход второго элементарного управляемого переключателя 5.2 соединен с выходом третьего элементарного управляемого переключателя 5.3 и является первым информационным выходом блока коммутации 5. Информационный вход третьего элементарного управляемого переключателя 5.3 является вторым информационным входом блока коммутации 5. Управляющий вход второго элементарного управляемого переключателя 5.2 в параллель соединен с первым и вторым входами инвертора и является управляющим входом блока коммутации 5. Выход инвертора в параллель соединен с управляющими входами первого элементарного управляемого переключателя 5.1 и третьего элементарного управляемого переключателя 5.3. Схемы управляемых элементарных переключателей известны и приведены, например, в книге: В.Л. Шило "Популярные микросхемы КМОП, справочник". - М.: Ягуар, 1993, стр. 22. Инвертор по своей физической сущности соответствует схеме базового элемента ИЛИ-НЕ. Схемы подобных элементов известны и приведены, например, в книге: В. Л. Шило "Популярные микросхемы КМОП, справочник". - М.: Ягуар, 1993, стр. 14.
Квантователь 6 предназначен для сравнения преобразованного по рекуррентному правилу формирования М-последовательности оценочного значения информационного сигнала с нулевым значением и формирования квантованного оценочного значения информационного сигнала. По физической сущности квантователю на два уровня соответствует схема нуль-органа. Подобные схемы известны и приведены, например, в книге: М.У. Банк "Аналоговые интегральные схемы в радиоаппаратуре". - М.: Радио и связь. 1981, стр. 25, рис. 2. 16(а).
Коррелятор 7, показанный на фигуре 12, предназначен для вычисления коэффициента корреляции между информационным сигналом и его оценочным значением и для вычисления коэффициента корреляции между информационным сигналом и сгенерированным сигналом М-последовательности. Коррелятор 7 состоит из аналогового перемножителя 7.1, интегратора 7.2 и линии задержки 7.3 на время, равное периоду следования дискретных отсчетов информационного сигнала. Первый информационный вход коррелятора 7 является первым информационным входом аналогового перемножителя 7.1. Второй информационный вход коррелятора 7 является информационным входом линии задержки 7.3, управляющий вход которой является управляющим входом коррелятора 7. Выход линии задержки 7.3 соединен со вторым информационным входом аналогового перемножителя 7.1, выход которого соединен со входом интегратора 7.2. Выход интегратора 7.2 является выходом коррелятора 7. Схемы аналоговых перемножителей известны и приведены, например, в книге: А.А. Сикарев, О.Н. Лебедев "Микроэлектронные устройства формирования и обработки сложных сигналов".-М.: Радио и связь. 1983, стр. 200, рис. 7.11. Схемы интеграторов известны и приведены, например, в книге: А.А. Сикарев, О.Н. Лебедев "Микроэлектронные устройства формирования и обработки сложных сигналов". - М.: Радио и связь, 1983, стр. 198, рис. 7.10. Описание линии задержки смотри ниже.
Устройство управления 8 предназначено для формирования управляющего сигнала, который управляет переключением в блоке коммутации и режимом работы регистра сдвига с обратными связями при достижении значения коэффициента корреляции заданного порогового значения. По своей физической сущности устройство управления соответствует схеме аналогового компаратора. Подобный компаратор может быть построен на операционном усилителе без обратной связи. В качестве устройства управления можно использовать, например, интегральный компаратор серии 521СА2. Сущность выполняемых действий аналогового компаратора описана и показана, например, в книге: А.А. Сикарев, О.Н. Лебедев "Микроэлектронные устройства формирования и обработки сложных сигналов". - М.: Радио и связь. 1983, стр. 204, рис. 7.14.
Регистр сдвига с обратными связями 9, показанный на фигуре 15, предназначен для задерживания квантованных оценочных значений информационного сигнала и генерации М-последовательности в соответствии с рекуррентным правилом порождающего полинома. Подобные схемы известны и приведены, например, в книге: А.А. Сикарев, О.Н. Лебедев "Микроэлектронные устройства формирования и обработки сложных сигналов". - М.: Радио и связь. 1983, стр. 152, рис. 6.1. С учетом особенностей заявляемого устройства регистр сдвига с обратными связями 9 может быть реализован, как показано на фигуре 15. Регистр сдвига с обратными связями 9 состоит из линий задержки 9.11....9.1n, (n+1) умножителей на постоянный множитель 9.2o...9.2n, (n-1) аналоговых перемножителей 9.31. ..9.3n-1 и управляемого переключателя 9.4. Второй управляющий вход регистра сдвига с обратными связями 9 в параллель соединен с управляющими входами всех линий задержки 9.11...9.1n. Выход i-й линии задержки 9.1i, где i= 1. ..(n-1), в параллель соединен со входами i-го умножителя на постоянный множитель 9.2i и с информационными входами (i+1)-й линии задержки 9.1(i+1). Выход n-й линии задержки 9.1n соединен со входом n-го умножителя на постоянный множитель 9.2n. Выход i-го умножителя на постоянный множитель 9.2i соединен с первым входом i-го аналогового перемножителя 9.3i. Выход n-го умножителя на постоянный множитель 9.2n соединен со вторым входом (n-1)-го аналогового перемножителя. Второй вход j-го аналогового перемножителя 9.3i, где j=1...(n-2), соединен с выходом (j+1)-го аналогового перемножителя 9.3(j+1), а выход первого аналогового перемножителя 9.31 соединен с информационным входом управляемого переключателя 9.4, управляющий вход которого является первым управляющим входом регистра сдвига с обратными связями 9, а выход соединен со входом нулевого умножителя 9.2о и является информационным выходом регистра сдвига с обратными связями 9. Выход нулевого умножителя на постоянный множитель 9.2о соединен со входом первой линии задержки 9.11 и является информационным входом регистра сдвига с обратными связями 9. Схемы аналоговых перемножителей известны и приведены, например, в книге: А.А. Сикарев, О. Н. Лебедев "Микроэлектронные устройства формирования и обработки сложных сигналов". - М.: Радио и связь. 1983, стр. 200, рис. 7.11. Схемы умножителей на постоянный множитель известны и приведены, например, в книге: Ю.А. Мячин "180 аналоговых микросхем, справочник". - М.: издательство Патриот, МП Символ-Р и редакция журнала Радио, 1993, стр. 7. Описание схемы линии задержки смотри ниже.
Управляемый переключатель 9.4, показанный на фигуре 13, предназначен для управления режимом генерации регистра сдвига с обратными связями 9. Управляемый переключатель 9.4 по своей физической сущности соответствует схеме элементарного управляемого переключателя. Схемы управляемых элементарных переключателей известны и приведены, например, в книге: В.Л. Шило "Популярные микросхемы КМОП, справочник". - М.: Ягуар. 1993, стр.22.
Линия задержки предназначена для задерживания аналогового значения сигнала. Схемы линий задержки по своей физической сущности соответствуют аналоговым линиям задержки. Аналоговые линии задержки, которые могут быть использованы в блоке формирования оценочных сигналов 3, в линии задержки 4, в корреляторе 7, в регистре сдвига с обратными связями 9 и в накопителе 3.8 известны и показаны, например, в книге: И.А. Цыкин "Дискретно-аналоговая обработка сигналов". - М.: Радио и связь. 1982, стр. 19, рис. 2.3. С учетом особенностей заявленного устройства схема аналоговой линии задержки может быть реализована, как показана на фигуре 16. Линия задержки содержит усилитель записи (УЗ), управляемый переключатель (УП), усилитель считывания (УС). Выход усилителя записи У3 является входом линии задержки, а выход соединен с информационным входом управляемого переключателя УП, управляющий вход которого является управляющим входом линии задержки. Выход управляемого переключателя в параллель соединен с первым контактом конденсатора и со входом усилителя считывания, выход которого является выходом линии задержки. Второй контакт конденсатора соединен с земляной шиной.
Заявленное устройство синхронизации работает следующим образом. Смесь сигнала и шума поступает на вход устройства синхронизации М-последовательности, показанного на фигуре 5. Сначала сигнал параллельно поступает на информационный вход дискретизатора 1 и на информационный вход выделителя тактовой частоты 2. В выделите тактовой частоты 2, показанного на фигуре 6, с помощью фазового дискриминатора 2.5 определяют период следования информационных сигналов и на выходе управляющего элемента 2.2 получают стробирующие импульсы с тактовой частотой информационного сигнала. Этот выход является первым управляющим выходом выделителя тактовой частоты 2. А на выходе делителя частоты 2.3 с коэффициентом деления, равным k, получают стробирующие импульсы с частотой, в k раз превышающей тактовую частоту информационного сигнала. Этот выход является вторым управляющим выходом выделителя тактовой частоты 2. Кроме того, смесь сигнала и шума со входа устройства синхронизации М-последовательности поступает в дискретизатор 1. На управляющий вход дискретизатора 1 поступают стробирующие импульсы с частотой, в k раз превышающей тактовую частоту информационного сигнала. В дискретизаторе получают дискретизированные отсчеты информационного сигнала с частотой в k раз выше тактовой частоты информационного сигнала. На выходе дискретизатора осуществляется первое разделение на две ветви обработки. В первой ветви первого разделения элементы дискретизированного информационного сигнала поступают на информационный вход линии задержки 4, показанной на фигуре 11. На управляющий вход линии задержки 4 поступают стробирующие импульсы с частотой, в k раз превышающей тактовую частоту информационного сигнала. В линии задержки 4 каждый дискретизированный отсчет информационного сигнала задерживают на время T, равное длительности информационного сигнала. Это производится следующим образом. Под воздействием стробирующих импульсов с частотой, в k раз превышающей тактовую частоту информационного сигнала, производится запись очередного дискретизированного отсчета информационного сигнала в первую линию задержки 4.1, структурная схема которой показана на фигуре 16. При этом содержимое i-й линии задержки 4.1i, где i=1...(k-1), записывается в (i+1)-ю линию задержки 4.1(i+1). А содержимое k-й линии задержки 4.1k поступает на выход линии задержки 4. Во второй ветви первого разделения элементы дискретизированного информационного сигнала поступают на информационный вход блока формирования оценочного сигнала 3.
В случае поступления на второй управляющий вход блока формирования оценочного сигнала 3 стробирующего импульса со второго управляющего выхода выделителя тактовой частоты 2 с частотой, равной тактовой частоте информационного сигнала, на информационный вход блока формирования оценочного сигнала 3 поступает первый дискретизированный отсчет информационного сигнала. При этом стробирующий импульс одновременно поступает на управляющие входы управляемого переключателя 3.2, показанного на фигуре 9, управляемого переключателя 3.6, показанного на фигуре 10, и накопителя 3.8, показанного на фигуре 8. В управляемом переключателе 3.2 под воздействием стробирующего импульса замыкаются контакты элементарного управляемого переключателя 3.2.1, а под воздействием инверсного стробирующего импульса, сформированного в инверторе 3.2.3, размыкаются контакты элементарного управляемого переключателя 3.2.2. В результате первый информационный вход управляемого переключателя 3.2, проключается на его информационный выход. В управляемом переключателе 3.6 под воздействием стробирующего импульса замыкаются контакты элементарного управляемого переключателя. В результате информационный вход управляемого переключателя 3.6, проключается на его информационный выход.
В случае первоначального вхождения в синхронизм в линии задержки 3.8.1 накопителя 3.8 должны быть записаны произвольные не нулевые начальные условия или могут находиться значения, оставшиеся с предыдущего сеанса связи.
В накопителе 3.8 под воздействием стробирующего импульса, поступающего на управляющий вход накопителя 3.8 и на управляющий вход каждой линии задержки 3.8.1, содержимое линии задержки 3.8.1(n-1) считывается и одновременно поступает на первый информационный выход накопителя 3.8 и на вход умножителя на постоянный множитель 3.8.2(n-1), содержимое n-й линии задержки 3.8.1n поступает на вход n-го умножителя на постоянный множитель 3.8.2n, содержимое j-й линии задержки 3.8.1j, где j=1...(n-2), одновременно записывается в (j+1)-ю линию задержки 3.8.1(j+1) и поступает на вход j-го умножителя на постоянный множитель 3.8.2j, выход i-го умножителя на постоянный множитель 3.8.2i, где i=1...(n-1), поступает на первый вход i-го аналогового перемножителя 3.8.3i. а выход n-го умножителя на постоянный множитель 3.8.2n поступает на второй вход (n-1)-го аналогового перемножителя 3.8.3(n-1), выход i-го аналогового перемножителя 3.8.3i является вторым входом (i-1)-го аналогового перемножителя 3.8.3(i-1), выход первого аналогового перемножителя 3.8.31 является входом умножителя на постоянный множитель 3.8.2o. Значение сигнала с выхода умножителя на постоянный множитель 3.8.2o является преобразованным по рекуррентному правилу оценочным значением информационного сигнала, полученным на предыдущем такте. Значение сигнала с выхода умножителя на постоянный множитель 3.8.2o одновременно поступает на вход линии задержки 3.8.11 и на второй информационный выход накопителя 3.8, который является вторым информационным выходом блока формирования оценочного сигнала 3. В умножителе на постоянный множитель 3.8.2 производится усиление сигнала на коэффициент, определяемый структурой порождающего полинома, и может принимать значения "0" или "1". Если коэффициент порождающего полинома равен единице, то обратная связь с соответствующей линией задержки существует, если равен нулю - то обратная связь с соответствующей линией задержки не существует. В аналоговом перемножителе 3.8.3 осуществляется аналоговое перемножение значений, поступающих на первый и второй входы. В результате сдвига в линиях задержки 3.8.1, умножения на соответствующий коэффициент в умножителе на постоянный множитель 3.8.2 и перемножения в аналоговых перемножителях 3.8.3 получают значение, сформированное по рекуррентному правилу формирования М-последовательности. Таким образом на первый информационный выход накопителя поступает предсказанное значение информационного сигнала, первый дискретизированный отсчет которого поступил на информационный вход блока формирования оценочного сигнала. С первого информационного выхода накопителя 3.8 предсказанное значение информационного сигнала поступает на вход умножителя на постоянный множитель 3.1 с коэффициентом усиления С2. Эксперименты показали, что коэффициент С2 целесообразно выбирать в пределах от 0.1 до 0.5. Предсказанное значение информационного сигнала, усиленное в C2, поступает на вход управляемого переключателя 3.2. Через замкнутые контакты элементарного управляемого переключателя 3.2.1 предсказанное значение информационного сигнала, усиленное в C2 раз, одновременно поступает на первый информационный вход первого аналогового сумматора 3.3. и на второй информационный вход второго аналогового сумматора 3.5. В первом аналоговом сумматоре 3.3 происходит вычитание предсказанного значения информационного сигнала, усиленного в C2 раз из первого дискретизированного отсчета информационного сигнала, поступившего на второй информационный вход первого аналогового сумматора 3.3. В результате вычитания получают значение, равное ошибке принятого дискретизированного отсчета информационного сигнала относительно предсказанного значения информационного сигнала, усиленного в C2 раз. С выхода первого аналогового сумматора 3.3 получения разность поступает на вход умножителя на постоянный множитель 3.4 с коэффициентом усиления C1. Эксперименты показали, что коэффициент C1 целесообразно выбирать в пределах от 0.5 до 1. С выхода умножителя на постоянный множитель 3.4 усиленное значение разностного сигнала поступает на первый информационный вход второго аналогового сумматора 3.5. На выходе второго аналогового сумматора 3.5 получают значение, которое является исправленным значением первого дискретизированного отсчета информационного сигнала с учетом предсказанного значения информационного сигнала, усиленного в C2 раз. С выхода второго аналогового сумматора 3.5 полученное оценочное значение информационного сигнала на первом дискретизированном отсчете одновременно поступает информационный вход второго управляемого переключателя 3.6 и на информационный вход линии задержки 3.7, где задерживается на время τ, равное длительности дискретизированного отсчета информационного сигнала. Так как контакты второго управляемого переключателя 3.6 находятся в разомкнутом состоянии, то сигнал дальше не проходит.
При поступлении последующих дискретизированных отсчетов сигнала, начиная со второго и до k-го, стробирующие импульсы с частотой, равной частоте следования информационных сигналов, на второй управляющий вход не поступают. Следовательно, управляющие сигналы на управляющие входы первого управляемого переключателя 3.2, второго управляемого переключателя 3.6 и накопителя 3.8 не поступают. При этом контакты элементарного управляемого переключателя 3.2.1 размыкаются, контакты элементарного управляемого переключателя 3.6 размыкаются, а под воздействием инверсных стробирующих импульсов, сформированных в интервалах 3.2.3, контакты элементарного управляемого переключателя 3.2.2 замыкаются. Следовательно, второй информационный вход управляемого переключателя 3.2 проключается на информационный выход управляемого переключателя 3.2. Оценочное значение информационного сигнала, полученное на предыдущем дискретизированном отсчете сигнала и записанного в линии задержки 3.7, является предсказанным значением информационного сигнала для очередного дискретизированного отсчета информационного сигнала. Предсказанное значение информационного сигнала для очередного дискретизированного отсчета информационного сигнала поступает на вход первого управляемого переключателя 3.2. Через замкнутые контакты элементарного управляемого переключателя 3.2.2 одновременно поступает на первый информационный вход первого аналогового сумматора 3.3 и на второй информационный вход второго аналогового сумматора 3.5. В первом аналоговом сумматоре 3.3 происходит вычитание предсказанного значения информационного сигнала, для очередного дискретизированного отсчета информационного сигнала, из очередного дискретизированного отсчета информационного сигнала, поступившего на второй информационный вход первого аналогового сумматора 3.3. В результате вычитания получают значение, равное ошибке принятого дискретизированного отсчета информационного сигнала относительно предсказанного значения информационного сигнала, для очередного дискретизированного отсчета информационного сигнала. С выхода первого аналогового сумматора 3.3 получения разность поступает на вход умножителя на постоянный множитель 3.4 с коэффициентом усиления C1. С выхода умножителя на постоянный множитель 3.4 усиленное значение разностного сигнала поступает на первый информационный вход второго аналогового сумматора 3.5. На выходе второго аналогового сумматора 3.5 получают значение, которое является исправленным значением очередного дискретизированного отсчета информационного сигнала с учетом предсказанного значения информационного сигнала. С выхода второго аналогового сумматора 3.5 полученное оценочное значение информационного сигнала на очередном дискретизированном отсчете одновременно поступает на информационный вход второго управляемого переключателя 3.6 на информационный вход линии задержки 3.7, где задерживается на время τ, равное длительности дискретизированного отсчета информационного сигнала. Полученное оценочное значение сигнала на k-м дискретизированном отсчете информационного сигнала, считают оценочным значением информационного сигнала в целом. При поступления очередного стробирующего импульса с частотой, равной тактовой частоте следования информационных сигналов, производятся действия, описанные выше для данного случая. Кроме того, оценочное значение информационного сигнала в целом через замкнутые контакты второго управляемого переключателя 3.6 поступает на первый информационный выход блока формирования оценочного сигнала 3.
Оценочное значение информационного сигнала в целом с первого информационного выхода блока формирования оценочного сигнала 3 поступает на первый информационный вход блока коммутации 5, показанного на фигуре 14. Преобразованное по рекуррентному правилу оценочное значение информационного сигнала, полученное на предыдущем такте, со второго информационного выхода блока формирования оценочного сигнала 3 поступает на первый информационный вход квантователя 6. Квантователь выполняет функции нуль-органа по сравнению входного сигнала с нулевым значением. Если входное значение сигнала больше нуля, то на выходе значение сигнала равно "+1", если входное значение сигнала меньше нуля, то на выходе значение сигнала равно "-1". Квантование выполняется с целью формирования значения сигналов, пригодных для заполнения регистра сдвига с обратными связями 9. С выхода квантователя квантованное значение сигнала поступает на второй информационный вход блока коммутации 5.
В режиме поиска синхронизации управляющее воздействие на управляющий вход блока коммутации 5 не поступает, следовательно, управляющее воздействие на управляющий вход элементарного управляемого переключателя 5.2 не поступает и его контакты разомкнуты. Управляющее воздействие, сформированное инвертором 5.4, поступает одновременно на управляющие входы элементарных управляемых переключателей 5.1 и 5.3, при этом их контакты замкнуты. Следовательно, когда управляющее воздействие на управляющий вход блока коммутации 5 не поступает, то первый информационный вход блока коммутации 5 проключается на его второй информационный выход, а второй информационный вход проключается на первый информационный выход.
С первого информационного выхода блока коммутации 5 квантованное значение сигнала поступает на информационный вход регистра сдвига с обратными связями 9, показанного на фигуре 15. При отсутствии управляющего воздействия на первый управляющий вход регистра сдвига с обратными связями 9 управляющее воздействие не поступает на управляющий вход управляемого переключателя 9.4, показанного на фигуре 13, и его контакты разомкнуты. При этом при поступлении стробирующего импульса с частотой, равной частоте информационных сигналов, на управляющие входы i-й линии задержки 9.1i, где i-1...(n-1), содержимое i-й линии задержки одновременно поступает на входы i-го умножителя на постоянный множитель 9.2i и записывается в (i+1)-ю линию задержки 9.1(i+1). Значение n-й линии задержки 9.1n поступает на вход n-го умножителя на постоянный множитель 9.2n. Значение сигнала с выхода i-го умножителя на постоянный множитель 9.2i поступает на первый вход i-го аналогового перемножителя 9.3i, а значение сигнала с выхода n-го умножителя на постоянный множитель 9.2n поступает на второй вход n-го аналогового перемножителя 9.3n. Выход j-го аналогового перемножителя 9.3j, где j=2...(n-1), поступает на вход (j-1)-го аналогового перемножителя 9.3(j-1). Сигнал с выхода первого аналогового перемножителя 9.31 поступает на информационный вход управляемого переключателя 9.4. Но так как его контакты разомкнуты, то сигнал дальше не проходит.
С выхода линии задержки 4 дискретизированные отсчеты информационного сигнала поступают на первый информационный вход коррелятора 7, показанного на фигуре 12.
На управляющий вход линии задержки 7.3 поступает стробирующие импульсы с тактовой частотой, равной частоте дискретизированных отсчетов информационного сигнала. Со второго информационного выхода блока коммутации 5 оценочное значение информационного сигнала в целом поступает на второй информационный вход коррелятора 7, показанного на фигуре 12. Оценочное значение информационного сигнала записывается в линию задержки 7.3 и считывается при поступлении каждого стробирующего импульса с частотой, равной частоте дискретизированных отсчетов информационного сигнала. С выхода линии задержки 7.3 оценочное значение информационного сигнала поступает на второй информационный вход аналогового перемножителя 7.1. В аналоговом перемножителе 7.1 каждое значение дискретизированного отсчета информационного сигнала, задержанное на время, равное длительности следования информационного сигнала в линии задержки 4, умножают на оценочное значение информационного сигнала. Результаты каждого перемножителя суммируют в интеграторе 7.2. Выход интегратора 7.2 является выходом коррелятора 7. Суммарное значение с выхода интегратора 7.2 поступает на вход устройства управления 8.
В устройстве управления на основе компаратора производят сравнение входного значения сигнала с пороговым. Значение порога выбирают в зависимости от отношения сигнал/шум на входе демодулятора и при этом должно быть оценено не менее n информационных сигналов, в этом случае все линии задержки регистра сдвига с обратными связями будут заполнены оценочными значениями информационных сигналов. Если пороговое значение не превышено, то управляющего воздействия с выхода устройства управления 8 не поступает, если пороговое значение превышено, то управляющее воздействие с выхода устройства управления 8 одновременно поступает на управляющий вход блока коммутации 5 и на первый управляющий вход регистра сдвига с обратными связями 9.
При поступлении управляющего воздействия на управляющий вход блока коммутации 5 управляющее воздействие поступает на управляющий вход элементарного управляемого переключателя 5.2 и замыкает его контакты. При этом инверсное управляющее воздействие, сформированное в инверторе 5.4, поступает на управляющие входы элементарных управляемых переключателей 5.1 и 5.3, контакты которых размыкаются. Следовательно, первый информационный выход блока коммутации 5 проключается на его второй информационный выход.
При поступлении управляющего воздействия на первый управляющий вход регистра сдвига с обратными связями 9 управляющее воздействие поступает на управляющий вход управляемого переключателя 9.4, показанного на фигуре 13, и его контакты замкнуты. При этом при поступлении стробирующего импульса с частотой, равной частоте информационных сигналов, на управляющие входы i-й линии задержки 9.1i, где i=1...(n-1), содержимое i-й линии задержки, показанной на фигуре 16, одновременно поступает на входы i-го умножителя на постоянный множитель 9.2i и записывается в (i+1)-ю линию задержки 9.1(i+1). Значение n-й линии задержки 9.1n поступает на вход n-го умножителя на постоянный множитель 9.2n. Значение сигнала с выхода i-го умножителя на постоянный множитель 9.2i поступает на первый вход i-го аналогового перемножителя 9.3i, а значение сигнала с выхода n-го умножителя на постоянный множитель 9.2n поступает на второй вход n-го аналогового перемножителя 9.3n. Выход j-го аналогового перемножителя 9.3j, где j=2...(n-1), поступает на вход (j-1)-го аналогового перемножителя 9.3(j-1). Сигнал с выхода первого аналогового перемножителя 9.31 поступает на информационный вход управляемого переключателя 9.4. Через замкнутые контакты управляемого переключателя 9.4 сигнал одновременно поступает на выход регистра сдвига с обратными связями 9, который является выходом устройства синхронизации М-последовательности, и на вход умножителя на постоянный множитель 9.2o, выход которого соединен с информационным входом первой линии задержки 9.11. При поступлении управляющего воздействия на первый управляющий вход регистра сдвига с обратными связями 9 начинается генерация М-последовательности, синхронной с принимаемой. Каждое сгенерированное значение М-последовательности с выхода умножителя на постоянный множитель 9.2o через замкнутые контакты элементарного управляемого переключателя 5.2 блока коммутации 5 поступает на второй информационный выход блока коммутации 5.
На управляющий вход линии задержки 7.3 поступают стробирующие импульсы с тактовой частотой, равной частоте дискретизированных отсчетов информационного сигнала. Со второго информационного выхода блока коммутации 5 сгенерированное значение М-последовательности поступает на второй информационный вход коррелятора 7, показанного на фигуре 12. Сгенерированное значение М-последовательности записывается в линию задержки 7.3 и считывается при поступлении каждого стробирующего импульса с частотой, равной частоте дискретизированных отсчетов информационного сигнала. С выхода линии задержки 7.3 сгенерированное значение М-последовательности поступает на второй информационный вход аналогового перемножителя 7.1. В аналоговом перемножителе 7.1 каждое значение дискретизированного отсчета информационного сигнала, задержанное на время, равное длительности следования информационного сигнала в линии задержки 4, умножают на сгенерированное значение М-последовательности. Результаты каждого перемножения суммируют в интеграторе 7.2. Причем значение интегратора, накопленное за период поиска синхронизации, не обнуляют, а вновь полученное значение суммируют с накопленными ранее. Выход интегратора 7.2 является выходом коррелятора 7. Суммарное значение с выхода интегратора 7.2 поступает на вход устройства управления 8.
В устройстве управления на основе компаратора производят сравнение входного значения сигнала с пороговым. Если значение коэффициента корреляции на выходе коррелятора 7 больше или равно значению порога, то управляющее воздействие на выход устройства управления 8 продолжает поступать и, соответственно, генерация М-последовательности продолжается. В этом случае считают, что был установлен истинный синхронизм. Если значение коэффициента корреляции на выходе коррелятора 7 меньше значения порога, то управляющее воздействие на выход устройства управления 8 не поступает и, соответственно, генерации М-последовательности прекращается. В этом случае считают, что был установлен ложный синхронизм. В этом случае попытка вхождения в синхронизм повторяется, но в линиях задержки 3.8.1 накопителя 3.8 блока формирования оценочного сигнала 3 записаны оценочные значения ранее принятых информационных сигналов. Это позволит сделать более точные оценки поступающих информационных сигналов М-последовательности, что значительно сократит время повторного вхождения в синхронизм.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО СИНХРОНИЗАЦИИ М-ПОСЛЕДОВАТЕЛЬНОСТИ | 2002 |
|
RU2244384C2 |
| СПОСОБ И УСТРОЙСТВО СИНХРОНИЗАЦИИ М-ПОСЛЕДОВАТЕЛЬНОСТИ С ПОВЫШЕННОЙ СЛОЖНОСТЬЮ | 1999 |
|
RU2153230C1 |
| СПОСОБ СКРЕМБЛИРОВАНИЯ АНАЛОГОВОГО СИГНАЛА И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ | 1997 |
|
RU2123764C1 |
| СПОСОБ И УСТРОЙСТВО СИНХРОНИЗАЦИИ ПСЕВДОСЛУЧАЙНЫХ ПОСЛЕДОВАТЕЛЬНОСТЕЙ | 2005 |
|
RU2320080C2 |
| СПОСОБ (ВАРИАНТЫ) И УСТРОЙСТВО (ВАРИАНТЫ) ОЦЕНИВАНИЯ НЕСУЩЕЙ ЧАСТОТЫ | 1998 |
|
RU2137143C1 |
| СПОСОБ ОЦЕНИВАНИЯ НЕСУЩЕЙ ЧАСТОТЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2100812C1 |
| ГЕНЕРАТОР НЕСУЩИХ КОЛЕБАНИЙ | 1997 |
|
RU2115166C1 |
| ОБНАРУЖИТЕЛЬ СИГНАЛОВ | 1997 |
|
RU2110150C1 |
| РАДИОЛИНИЯ С АМПЛИТУДНО-ФАЗОМАНИПУЛИРОВАННЫМИ ШУМОПОДОБНЫМИ СИГНАЛАМИ | 1996 |
|
RU2101871C1 |
| ВЕКТОРНЫЙ ГЕНЕРАТОР | 1995 |
|
RU2100842C1 |
Способ синхронизации М-последовательности предусматривает получение оценочного значения информационного сигнала путем аналоговой обработки дискретизированных отсчетов информационного сигнала с учетом предсказанного значения сигнала, полученного на основе рекуррентного преобразования ранее приятных и оцененных информационных сигналов. В устройство синхронизации М-последовательности дополнительно введены дискретизатор 1, выделитель тактовой частоты 2 и квантователь 6, а блок формирования оценочных сигналов 3 преобразован для получения оценочных значений информационного сигнала на каждом дискретизированном отсчете информационного сигнала в аналоговой форме с учетом предсказанного значения информационного сигнала. Технический результат заключается в уменьшении времени синхронизации сложных сигналов. 2 с. и 4 з.п.ф-лы, 18 ил.
5. Устройство синхронизации М-последовательности, содержащее блок формирования оценочных сигналов, каскадно соединенные по информационным входам линию задержки, коррелятор и устройство управления, выход которого подключен к первому управляющему входу регистра сдвига с обратными связями, выход которого является выходом устройства синхронизации, отличающееся тем, что дополнительно введены блок коммутации, выделитель тактовой частоты, квантователь и дискретизатор, информационный вход которого в параллель соединен с входом выделителя тактовой частоты и является входом устройства синхронизации, а выход в параллель соединен с информационным входом линии задержки и информационным входом блока формирования оценочного сигнала, первый выход которого соединен с первым информационным входом блока коммутации, а второй выход соединен с входом квантователя, выход которого соединен со вторым информационным входом блока коммутации, первый выход которого соединен с информационным входом регистра сдвига с обратными связями, а второй выход соединен со вторым информационным входом коррелятора, выход устройства управления в параллель соединен с управляющим входом блока коммутации и первым управляющим входом регистра сдвига с обратными связями, первый управляющий выход выделителя тактовой частоты в параллель соединен с управляющими входами дискретизатора, линии задержки, коррелятора и первым управляющим входом блока формирования оценочного сигнала, а второй управляющий выход в параллель соединен со вторым управляющим входом регистра сдвига с обратными связями и вторым управляющим входом блока формирования оценочного сигнала.
| Журавлев В.И | |||
| Поиск и синхронизация в широкополосных системах | |||
| - М.: Радио и связь, 1986, с | |||
| Бесколесный шариковый ход для железнодорожных вагонов | 1917 |
|
SU97A1 |
| Способ синхронизации последовательности | 1976 |
|
SU674232A1 |
| Устройство для синхронизации -последовательностей с инверсной модуляцией | 1976 |
|
SU576667A1 |
| Устройство для синхронизации м-последовательности | 1975 |
|
SU544156A1 |
| SU 532968 A, 28.03.77 | |||
| Устройство синхронизации м-последовательности | 1975 |
|
SU566377A1 |
| Способ синхронизации м-последовательности | 1974 |
|
SU605325A1 |
| Устройство для определения фазы псевдослучайного сигнала | 1975 |
|
SU559423A1 |
| Сикарев А.А | |||
| Микроэлектронные устройства формирования и обработки сложных сигналов | |||
| - М.: Радио и связь, 1983, с | |||
| Кран машиниста для автоматических тормозов с сжатым воздухом | 1921 |
|
SU194A1 |
