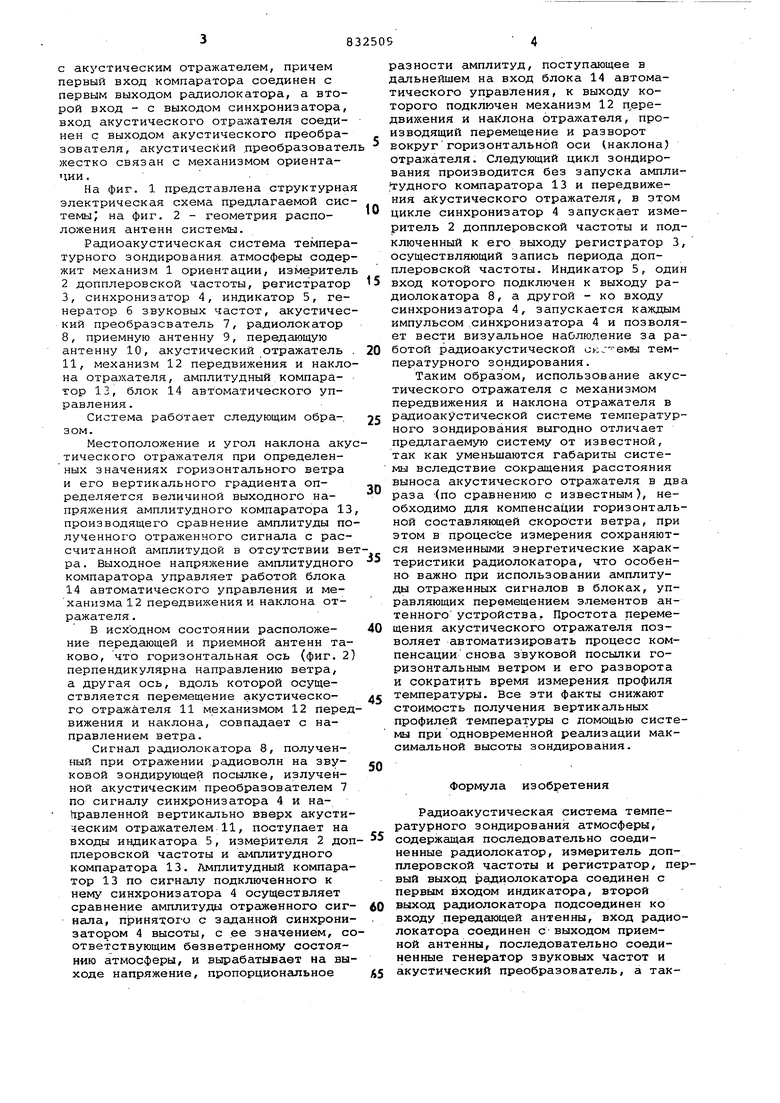
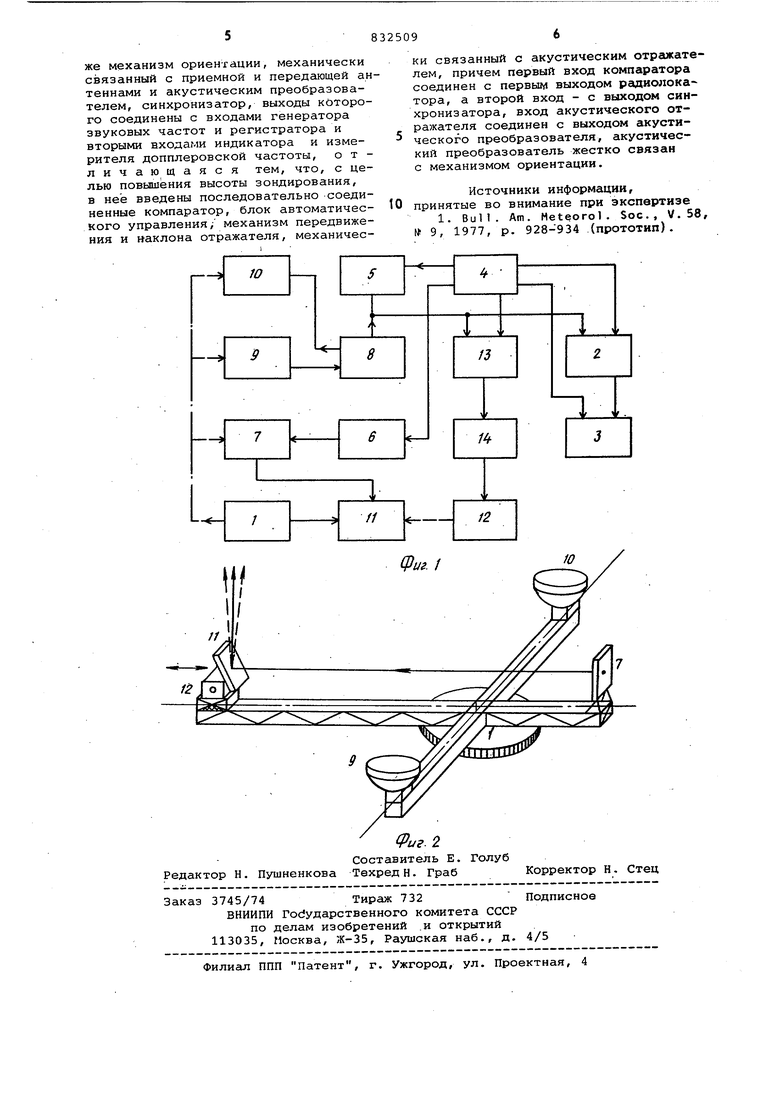
Изобретение относится к технике радиометеорологии и может использоваться в метеообеспечении работ по защите атмосферного воздуха от загрязнения, в исследованиях условий распространения ультракоротких волн в атмосфере, при составлении прогнозов погоды. Известна радиоакустическая система температурного зондирования атмос феры, содерзхгицая последовательно сое диненные радиолокатор, измеритель допплеровской частоты и регистратор первый выход радиолокатора соединен с первым входом индикатора, второй выход радиолокатора подсоединен ко входу передающей |антенны, вход радиолокатора соединен с выходом приемной антенны, последовательно соединенные генератор звуковых частот и акустический преобразователь, а та же механизм ориентации, механически связанный с приемной и передающей а теннами и акустическим преобразовате лем, синхронизатор, выходы которого соединены с выходами генератора зву ковых частот и регистраторами и вто рыми входами индикатора и измерителя допплерской частоты l. Однако известная система имеет низкую высоту зондирования. Цель изобретения - повьапение высоты зондирования. Поставленная цель достигается тем, что в радиоакустическую систему температурного зондирования атмосферы, содержащую последовательно соединенные радиолокатор, измеритель допплеровской частоты и регистратор, первый выход радиолокатора соединен с первым входом индикатора, второй выход радиолокатора подсоединен ко входу передающей антенны, вход радиолокатора соединен с выходом приемной антенны, последовательно соединенные генератор звуковых частот и акустический преобразователь, а также механизм ориентации, механически связанный с приемной и передающей антеннами и акустическим преобразователем, синхронизатор, выходы которого соединены с входами генератора звуковых частот и регистратора и вторь1ми входами индикатора и иЗмерителя допплеровской частоты, в нее введены последовательно соединенные компаратор, блок автоматического управления, механизм передвижения и наклона отражателя, механически связанный с акустическим отражателем, причем первый вход компаратора соединен с первым выходом радиолокатора, а второй вход - с выходом синхронизатора, вход акустического отражателя соединен с выходом акустического преобразователя, акустический преобразовате жестко связан с механизмом ориентации . На фиг. 1 представлена структурна электрическая схема предлагаемой сис темы; на фиг. 2 - геометрия расположения антенн системы. Радиоакустическая система темпера турного зондирования атмосферы содер жит механизм 1 ориентации, измерител 2 допплеровской частоты, регистратор 3, синхронизатор 4, индикатор 5, генератор б звуковых частот, акустичес кий преобразователь 7, радиолокатор 8, приемную антенну 9, передающую антенну 10, акустический отражатель 11, механизм 12 передвижения и накло на отра): ателя, амплитудный . компаратор 13, блок 14 автоматического управления. Система работает следующим образом. Местоположение и угол наклона аку тического отражателя при определенных значениях горизонтального ветра и его вертикального градиента определяется величиной выходного напряжения амплитудного компаратора 13 производящего сравнение амплитуды по лученного отраженного сигнала с рассчитанной амплитудой в отсутствии ве ра. Выходное напряжение амплитудного компаратора управляет работой блока 14 автоматического управления и механизма12 передвижения и наклона отражателя . В исходном состоянии расположение передающей и приемной антенн таково, что горизонтальная ось (фиг. 2 перпендикулярна направлению ветра, а другая ось, вдоль которой осуществляется перемещение акустического отражателя 11 механизмом 12 перед вижения и наклона, совпадает с направлением ветра. Сигнал радиолокатора 8, полученный при отражении радиоволн на звуковой зондирующей посылке, излученной акустическим преобразователем 7 по сигналу синхронизатора 4 и направленной вертикально вверх акустическим отражателем 11, поступает на входы индикатора 5, измерителя 2 доп плеровской частоты и агШлитудного компаратора 13. Амплитудный компаратор 13 по сигналу подключенного к нему синхронизатора 4 осуществляет сравнение амплитуды отраженного сигнала, принятого с заданной синхронизатором 4 высоты, с ее значением, со ответствующим безветренному состоянию атмосферы, и вырабатывает на выходе напряжение, пропорционгшьное разности амплитуд, поступающее в дальнейшем на вход блока 14 автоматического управления, к выходу которого подключен механизм 12 цередвижения и наклона отражателя, производящий перемещение и разворот вокруггоризонтальной оси нaклoнa) отражателя. Следующий цикл зондирования производится без запуска амплитудного компаратора 13 и передвижения акустического отражателя, в этом цикле синхронизатор 4 запускает измеритель 2 допплеровской частоты и подключенный к его выходу регистратор 3, осуществляющий запись периода допплеровской частоты. Индикатор 5, один вход которого подключен к выходу радиолокатора 8, а другой - ко входу синхронизатора 4, запускается каждым импульсом .синхронизатора 4 и позволяет вести визуальное наблюдение за работой радиоакустической температурного зондирования. Таким образом, использование акустического отражателя с механизмом передвижения и наклона отражателя в радиоакустической системе температурного зондирования выгодно отличает предлагаемую систему от известной, так как уменьшаются габариты системы вследствие сокращения расстояния выноса акустического отражателя в два раза -(по сравнению с известным), необходимо для компенсации горизонтальной составляющей скорости ветра, при этом в процессе измерения сохраняются неизменныг/1и энергетические характеристики радиолокатора, что особенно важно при использовании амплитуды отраженных сигналов в блоках, управляющих перемещением элементов антенного устройства. Простота перемещения акустического отражателя позволяет автоматизировать процесс компенсации снова звуковой посылки горизонтальным ветром и его разворота и сократить время измерения профиля температуры. Все эти факты снижают стоимость получения вертикальных профилей температуры с помощью системы при одновременной реализации максимальной высоты зондирования. Формула изобретения Радиоакустическая система температурного зондирования атмосферы, содержащая последовательно соединенные радиолокатор, измеритель допплеровской частоты и регистратор, первый выход радиолокатора соединен с первым входом индикатора, второй выход радиолокатора подсоединен ко входу передающей антенны, вход радиолокатора соединен С выходом приемной антенны, последовательно соединенные генератор звуковых частот и акустический преобразователь, а так
| название | год | авторы | номер документа |
|---|---|---|---|
| Радиоакустический способ определения влажности воздуха | 1989 |
|
SU1670641A1 |
| Способ определения влажности воздуха радиоакустическим зондированием атмосферы | 1990 |
|
SU1780071A1 |
| Радиоакустический способ зондирования атмосферы | 1989 |
|
SU1658105A1 |
| Способ радиоакустического зондирования атмосферы | 1980 |
|
SU883837A1 |
| Радиоакустическое устройство для измерения сдвига ветра | 1989 |
|
SU1689899A1 |
| СПОСОБ РАДИОАКУСТИЧЕСКОГО НАКЛОННОГО ЗОНДИРОВАНИЯ АТМОСФЕРЫ | 1999 |
|
RU2152055C1 |
| РАДИОКОМПЛЕКС РОЗЫСКА МАРКЕРОВ | 1994 |
|
RU2108596C1 |
| КОМБИНИРОВАННАЯ РАДИО-И АКУСТИЧЕСКАЯ АНТЕННА | 1999 |
|
RU2168818C1 |
| Акустический локатор | 1981 |
|
SU991345A1 |
| Радиоакустический способ измерения параметров ветра и устройство для его осуществления | 1989 |
|
SU1672386A1 |
