iSi} АКУСТИЧЕСКИЙ ЛОКАТОР


| название | год | авторы | номер документа |
|---|---|---|---|
| Акустический локатор для измерения скорости ветра | 1980 |
|
SU940119A2 |
| АКУСТИЧЕСКИЙ ЭХОЛОКАТОР | 2002 |
|
RU2288484C2 |
| АКУСТИЧЕСКИЙ ЭХОЛОКАТОР | 2002 |
|
RU2205421C1 |
| МОНОИМПУЛЬСНАЯ РЛС МИЛЛИМЕТРОВОГО ДИАПАЗОНА | 2015 |
|
RU2600109C1 |
| РАДИОЛОКАЦИОННЫЙ ПРИЕМНИК С КАНАЛАМИ ВЫСОКОГО РАЗРЕШЕНИЯ | 2007 |
|
RU2344436C1 |
| НЕЛИНЕЙНЫЙ РАДАР ДЛЯ ДИСТАНЦИОННОГО МОНИТОРИНГА ПРОДУКТОПРОВОДОВ | 2007 |
|
RU2343499C1 |
| ЦИФРОВОЙ ПРИЕМНЫЙ МОДУЛЬ АКТИВНОЙ ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЕТКИ | 2019 |
|
RU2722408C1 |
| ИМПУЛЬСНО-ДОПЛЕРОВСКАЯ МОНОИМПУЛЬСНАЯ РЛС | 2011 |
|
RU2497146C2 |
| ЦИФРОВОЙ ПРИЕМНИК СПУТНИКОВОЙ НАВИГАЦИИ | 1995 |
|
RU2090902C1 |
| СИСТЕМА ОБНАРУЖЕНИЯ И РАСПОЗНАВАНИЯ ОБЪЕКТОВ, ВКЛЮЧАЮЩИХ ЭЛЕМЕНТЫ С НЕЛИНЕЙНЫМИ ВОЛЬТАМПЕРНЫМИ ХАРАКТЕРИСТИКАМИ | 2000 |
|
RU2166769C1 |
Изобретение относится к метеорологии и может быть использовано для дистанционного измерения профилей температуры, скорости и направления ветра в атмосфере.
Известны акустические локаторы для определения скорости ветра в атмосфере, основанные на измерении доплеровского сдвига частоты сигнала, рассеянного на движущихся под действием ветра неоднородностях атмосферы, относительно частоты излучаемого сигнала и состоящие из антенны, задающего генератора, усилителя мощности, синхронизатора, переключателя прием-передача входного антенного усилителя, полосового фильтра, спектроанализатора и ЭВМ l 3.
Принимаемый сигнал подвергается спектральному анализу: в начале определяется его энергетический спектр (спектр мощности), а затем - средняя частота fcp как средневзвешенная
1по энергетическому спектру, и далее находится скорость радиального ветра V по известной формуле Доплера: С (fcp- fp) (, J
2f.
где fj - частота излучаемого сигнала;С - средняя скорость звука в
рассеивающем объеме.
to При этом С полагают равной скорости звука на уровне земли, которую всегда можно определить, зная температуру на уровне земли,по формуле:
C 20,05fr,(2)
15
где Т - абсолютная температура, в К.
Допускаемой погрешностью при замене в выражении (,1 } значения скорости звука в рассеивающем объеме на ее
20 значение на уровне земли обычно пренебрегают .
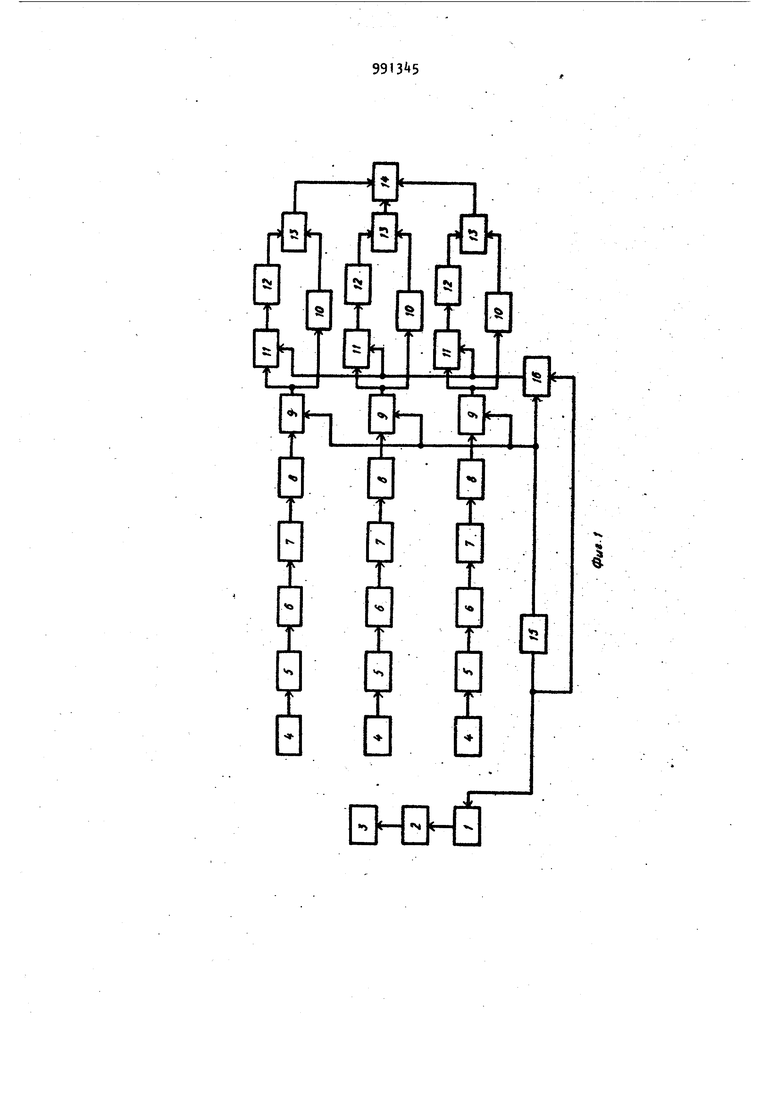
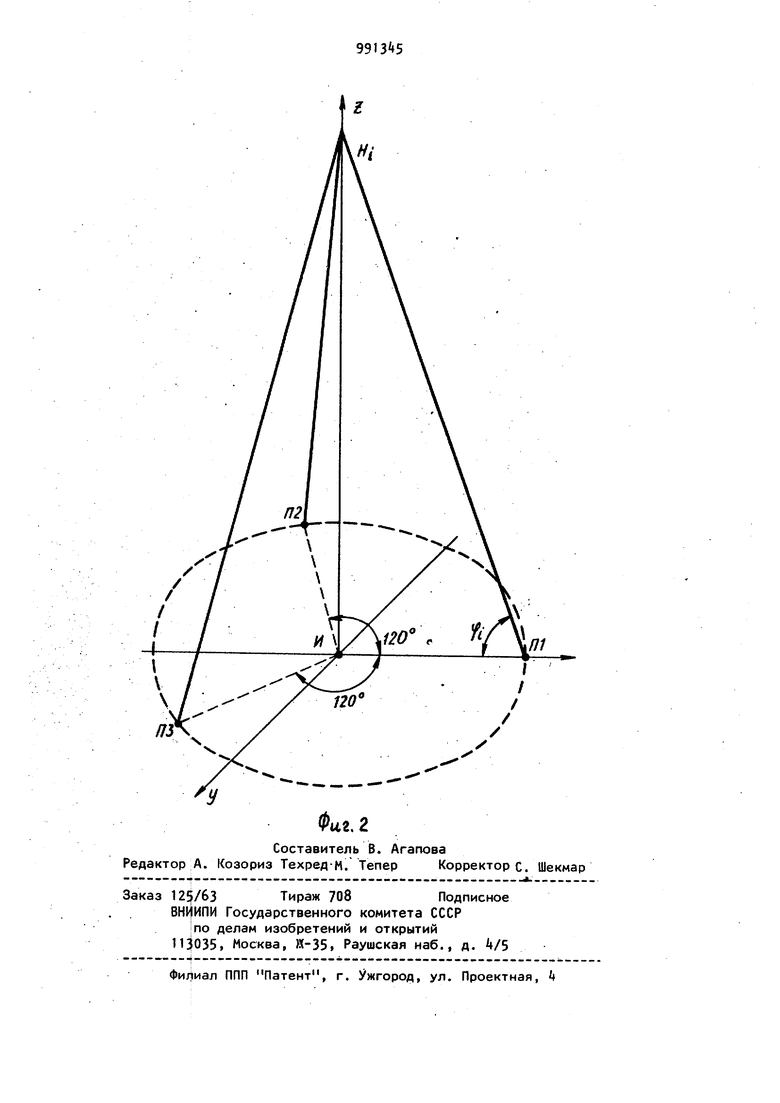
Наиболее близким по технической сущности является акустический локатор, содержащей последовательно соединенные задафщий генератор, усилитель мощности передающую антенну и три приемных фанала, каждый из которых выполней в виде аналого-цифрового преобразователя и последователь но соединенных приемной антенны, входного антенного усилителя и полосового фильтр, а также синхронизатор, соединенный с задающим генератаром и аналог о-цифровыми преобразователями, иiсчетно-решающую схему. При этом передающая антенна ориентирована верт1 кально вверх, а три приемные антеНны расположены на окружности некоторого радиуса с центро в месте распо/|ожения передатчика и разнесены на |гол 120 относите/ibHO друг друга. Ое|и направленности всех трех .приемных |антенн наклонены к горизонтали подjопределенным углом, которым зaдaetcя высота центра рассеивающего объема, и ориентированы н осевую линию передающей антенны. Излученный передатчиком акустический Сигнал рассеифается атмосферой, поСтупает на вход приер1ников и после спектрального:анализа определяются оплеровские фдвиги частоты в каждом приемном анале, и далее по определенным фо|(мулам оценивается полный вектор скорости ветра 2. Недостатком акустического локатора является невозможность измерения температурного) профиля атмосферы, так как эффект1 влияния изменений по высоте темперфуры-на допплеровский сдвиг (.1 ) мал ;по сравнению с влияние изменений скорости ветра. Цель изобре|тения - расширение функциональных возможностей акустического локатора, а именно измерение наряду с направлением и скорость ветра температурного профиля атмосфе ры. Для достижения указанной цели аку тический локатор, содержащий последовательно соединенные задающий гене ратор, усилитель мощности, передающую антенну и три приемных канала, каждый из которых выполнен в виде аналого-цифрового преобразователя и последовательно соединенных приемной антенны, входного антенного усилител и .полЪсового фИльтра, а также синхро низатор, соединенный с задающим гене ратором и аналрго-цифровыми преобразователями, и Ьчетно-решающую схему, 9 5 он снабжен квадратичным детектором, фильтром низкой частоты, умножителем, двумя сумматорами и делителем, введенными s каждый канал, причем квадратичный детектор и фильтр низкой частоты соединены последовательно, вход квадратичного детектора соединен с выходом полосового фильтра, выход фильтра низкой частоты - с входом аналого-цифрового преобразователя, последовательно соединенные умножитель и первый сумматор соединены параллельно с вторым сумматором, их вход соединен с выходом аналого-цифрового преобразователя, а выход - с входом делителя, выходы которых соединены с входом счетнорешающей схемы, два входа- введенного счетчика соединены с двумя выходами синхронизатора, а его выход с умножителями. На фиг. 1 приведена структурная схема акустического локатора; на фиг. 2 - геометрия зондирования, где И - передатчик, П. - j-ый приемник, ,3. Акустический локатор содержит последовательно соединенные задающий генератор 1, усилитель 2 мощности, передающую антенну 3 три приемных канала, каждый из которых содержит последовательно соединенные приемную антенну , входной антенный усилитель 5 полосовой фильтр 6, квадратичный детектор 7, фильтр 8 низкой частоты и аналого-цифровой преоб разователь 9. втОрой сумматор 10, соедигненный параллельно с последовательно соединенными умножителем 11 и первым сумматором 12, причем их вход соединен с выходом аналого-цифрового преобразователя 9 а выход - с входом делителя 13 выходы которых соединены с входом счетно-решающей схемы 14. Устройство содержит также синхронизатор 15, соединенный с задающим генератором 1 и аналого-цифровыми преобразователями 9, и счетчик 16, два входа которого соединены с двумя выходами синхронизатора 15, а его выход - с умножителями 11. Работа предлагаемого устройства осуществляется следующим образом. Задающий генератор 1 формирует последовательность импульсных электрических колебаний выбранной частоты и задаваемой синхронизатором 15 длительности и периода посылки, которые усиливаются усилителем 2 мощности, прербразуются передающей антенной 3 в акустические и посылаются в атмосферу Рассеянный на атмосферных неоднородностях в объеме выбранной высоты, акустический сигнал пос,тупает к приемным, антеннам k-и преобразуется в электрический сигналг усиливается входным и антенными усилителями 5 фильтруется полосовыми фильтрами 6 по несущей частоте на фоне шумовых помех, подвергается не1линейному преобразованию в квадра тичных детекторах 7 и после прохШде |ния фильтров 8 низкой частоты выде1ленная огибающая сигнала в аналогоцифровых преобразователях 9 дискретизируе ся во времени с помощью импульсов запуска аналого-цифровых пре образователей 9 с синхронизатора 15 и квантуется по амплитуде. Закодированные отсчеты сигнала X (К)поступают в два параллельных канала: в од ном из них они суммируются во втором сумматоре 10, а в другом перемножаются в умножителе И с их номером К, поступающим со счетчика 16, который считает импульсы запуска аналого-циф ровых преобразователей 9 в пределах каждого периода посылки Т(,, и полученные произведения (К)суммируются в первом сумматоре 12. После этоfo результат второго канала делится а результат первого канала в делителе 13 и на его выходе будет средне . взвешенное значение R где д1 -KZUf Q,) - интервал дискретизации; wMf максимально возможная ширина, спектра огибающей сигнала. Числа К с выхода Делителей 13 каж дого из трех приемных каналов посту. пают на счетно-решающую схему 1, гд находится время прихода рассеянного на высоте Н, сигнала в j приемник с момента посылки передатчиком зондирукидего импульса t.- «К,; - 1,и опре деляется в произвольном слое атмосферы средняя температура Т и ортогональные составляющие скорости ветра V в горизонтальной плоскоети V)t-i и Vj по формулам (фиг.2). TI (,,,)(20,05Г,т)3 И) ,Ч(-1-Н,и)ГЯ,у/Пт (5) 9 5 ()U,V, 4T t4i-H:2,i+4.i fer x4-f+- .O-t- it. , л C-«4vtn-tiH.yViH -.- IJ- о l-1,T (4t 4i-i4i) 4s-Yi(,) В случае использования геометрии зондирования, отличающейся от пока-i занной на фиг. 2, соотношения (6 изменяются. Условием возможности измерения всех искомых параметров-(Т,Уу| Vy) является требование, чтобы три приемных канала были располснкены не на одной прямой. Работа основана на возможности сжределения скорости звука, определяемой абсолютной температурой Т и проекцией скорости ветра V вдоль направления распространения звуковой волны известной зависимостью С 20.05-/Т tV (7) по измерениям времени прохождения звукового сигнала по известной трассе.. I Учитывая, что Т-скаляр, а v -вектор, можно разделить их вклады в вы ражении ,(7) используемой геометрией зондирования. Предлагаемый акустический локатор позволяет наряду с измерением направления и скорости ветра определять также температурный атмосферы. Формула изобретения Акустический лакатор,содержащий .последовательно соединенные задающий |генерзтор, усилитель мощности, переда бщую антенну и три приемных канала, каждый из которых выполнен в виде аналого-цифрового преобразователя и последовательно соединенных приемной антенны; входного антенного усилителя и полосового фильтра, а также синхронизатор, соединенный с за-. дающим генератором и аналого-цифровыми преобразователями, и счетно-решаю1цую схему, отличающийс я тем, что, с целью расширения функциональных возможностей, ои снабжен квадратичным детектором, фильтром низкой частоты, умножителем, двумя сумматорами и делителем, введенными в каждый канал, причем квад7ЭЭ З 5
ратичный детектор и фильтр низкой частоты соединены последовательно, вход квадратичного детектора соединен с выходом полосового фильтра, выход фильтра низкой частоты - с входом s аналого-цифрового преобразователя, последовательно соединенные умножитель и первый сумматор соединены параллельно с вторым сумматором, их вход соединен с выходом аналого-циф- О рового преобразователя, а выход - с ,входом делителя, выходы которых соединены с входом счетно-решающей схе8
мы, два входа введенного счетчика соединены с двумя выходами сиихрони-i затора, а его выход - с умножителями.
Источники информации, принятые во внимание при экспертизе
