Прсдметол 1гзобрето1пг5 яиляетгя нидукциоишпЛ латчшл с якорем. распо.чо/кепиым шю элсктромагнито. Taiviie датчики niiipoiai iiiiiuHTUM ijo лрнмеиотпио irx л следящих устроИгтпах.
С це.тью унеличепля чулст1Я1тел11Иост11 иидукцпоштого датчика и ио«|)1Л1еи11я точиости остаионки 11ОД1И1и;и1,1х чаете уирап.чяемых .мехапи;; мов. и предлагаемом датчшсе сердечиики ;)лектромагиит()1 сде.чаШ) секци()||11|5()ваииы.111. а якори-peopiieTi.iMii. Для огушестилепия /кч остаиои|;и управ.чяемого мехаиизма в иее1хОЛ1,к11х задаи|п.1х иоло 1чЧииях датчик спаб/каотея ii()/ii KnMii якорями.
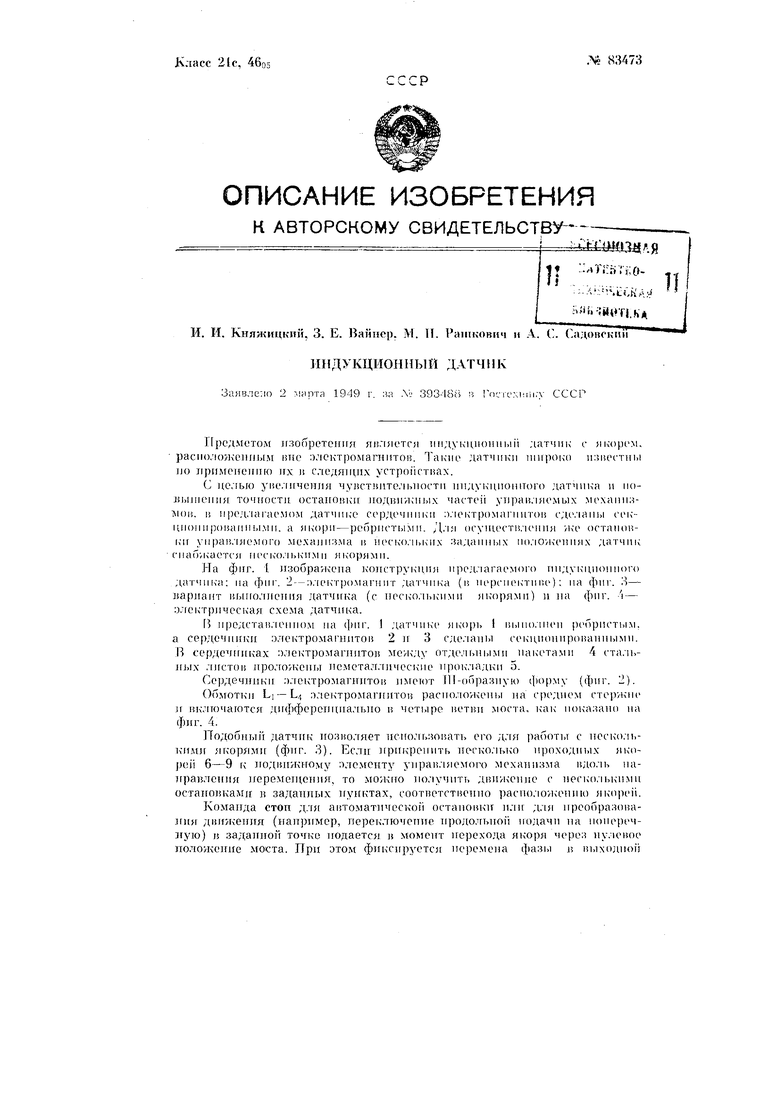
На фиг. 1 нзображсч1а 011струки,ия )еллагаемого ппдукциопиого датчшча: иа фиг. 2 - ;)лект1К)мап11гг датчика (и иерсиоктипе); на фиг. о- ла)лаит 1 Ь гголле1111я датчика (с ттесколысими якорями) и iia фиг. i - электрическая схема датчика.
5 иредстав.теииом иа фиг. 1 датчикч якорь I вмпо.чиеи )еорпетым. а сердсчилк электромагнитои 2 л 3 сделалы (Л1иро1 аииыми. И сердечниках :)лектрол1агилто меичду отдельиыми .ми 4 гта.и.iij)ix гпгсто лро.гожеиы неметаллические лрокладки о.
Сердечлики ;)лектрома1литои илгетот Ш-оораяиую форму (фиг. 2).
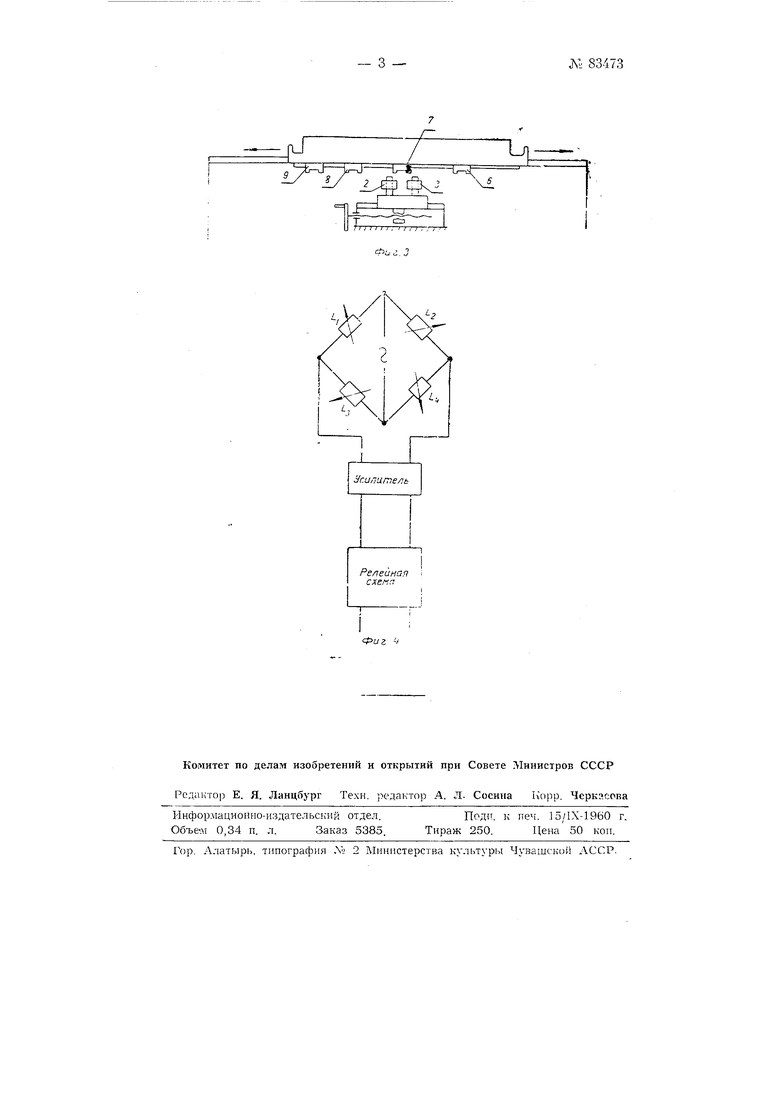
Оолготки LI - L плектромагилтои расиоложеиы иа среднем стер/кне и включаются дифферепциальло в четыре ветш моста, как пока.чало иа фиг. 4.
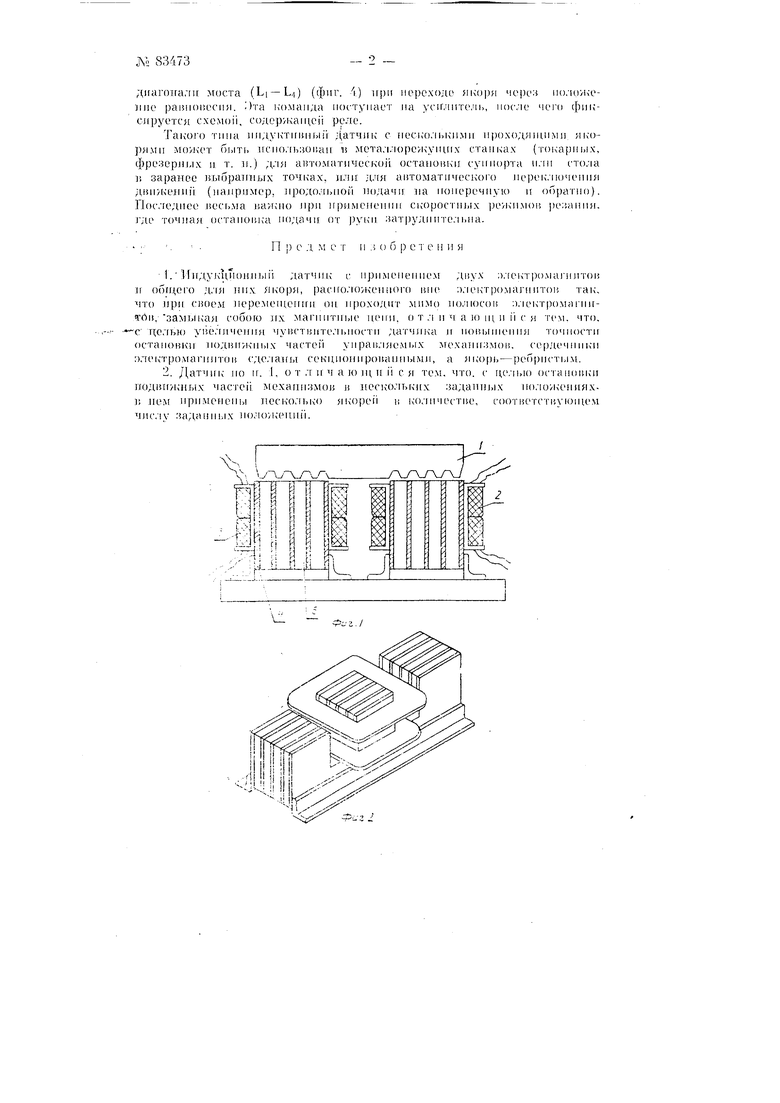
Подобный датчик иояио.тяет исиолыювать его д.чя работы с иескольi-vifAur якорями (фиг. 3). грикреиить иесколько ироходиых якоpoii 6-9 к иоднижному ix-ieiteKTy уираиляемого мохатпкпта вдоль иатгравлеиия перемещения, то мо/кгто получить движоиие с иесколькл.ми оста1гонками ji заданных иунктах, соотпетствонио расио. jiKopeii.
Команда стоп для автоматической остаиовки и.ти д.чя преобразования дви/коиня (иаиример, нероключетпте иродо.чьио иод,ачи на иоиеречлую) J задатгиои точке тгодается н момент иерехода якоря через ну.чевое положение моста. Нрп этом фиксируето неремена фазы js ныходнот
диаготгагпг моста (L| -L-i) (фиг. Л) ii)i iiopoxoju як())я через iio/io/i eiiJie раипоиесия. :)та ьомапда поступает па ччмг.мпте.мь, после чет фиксируется cxcMoii, co;iep/Kani,eii роле.
Такого типа nii;iyi-;Tniini iii с fiecKoniiKii.Mii про.одя111.пм11 яко)ямп моичет Di.iTi, : гспол1,;К) li мотал.1О()е купи1 станках (токарных, фречериых п т. и.) д.тя автоматической остаповкп суппорта п.-щ сто.па 1 заранее libiopainibrx точках, или лля автоматического переключеппя Д1И1/кеип1 | (иалример, лродольпон подачи на поперечпую п оГ))атио). Иоследпее весьма важпо при нримепеиии ci;opocTnjjix ре/кп.мо1 ре:,аппя. J;ie точная ocTaiioi i;a подачи от |)укп затрудп11тел1,па.
) с .1, м с т п .i С) б р с т е 11 и я
I. 11иду.1лиТ1онньп 1 датчпк с иримепеппем Днух ;)ле1п-ромаг11ито1 н ,его для нпх лкоря, располо/кен.юго вис- ;)лектрома)-иитои та:;, что при ciioeM неремеп1еггии ои проходит .мимо нолюсои п.чектролиичпгчОв, замыкая собою нх магнитные цемп, о т л и ч а ю и( и ii с я тем. что, С де.тью увеличения чу1 ств11те.11,11()сти датчика и по1 | 1И1еппя точностп остановки нодвпилиых частей управляемых лгеханизмов, се)деч11ик-п ;)лектролгагннтов сдела1Г1л секнноннропаиными, а якорь-рео1)нсты.м.
2. Датчик IK) II. 1, о т л н ч а К) HI, и 11 с я тем. что. с Г1,елы() осташниш (х частеЛ механизмо н нескольких задан1п,1х ноложеииях) нелг нрнменепы несколько якоре в количестве, соответствующем 4J1C.-1V заданных ноложе
V..V
Mlifjri tj
M|:MFi J
Ш1:1 j ti .
WfiMi Й
; :4i. j