В ОСНОВНОМ авторском свидетельстве описан индуктивный датчик линейных перемещений с электромагнитной системой, полюса которой имеют форму гаек, и с якорем в виде винта.
Настоящее изобретение является дальнейщим развитием индуктивного датчика согласно авт. св. № 95261 и обеспечивает повыщение точности отсчета перемещений. Достигается это тем, что поворотный винтообразный якорь датчика жестко соединен с кольцеобразным зубчатым якорем индуктивного преобразователя вращательного движения, у которого поворотная электромагнитная система имеет полюса в виде зубчатых венцов.
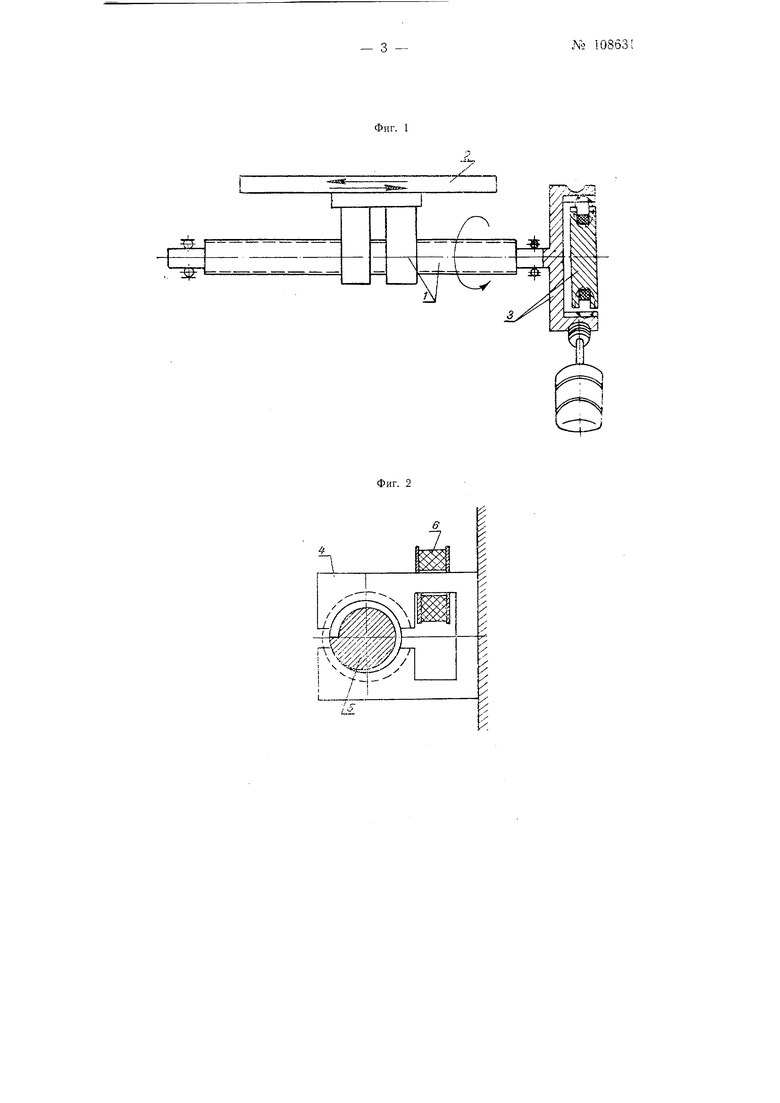
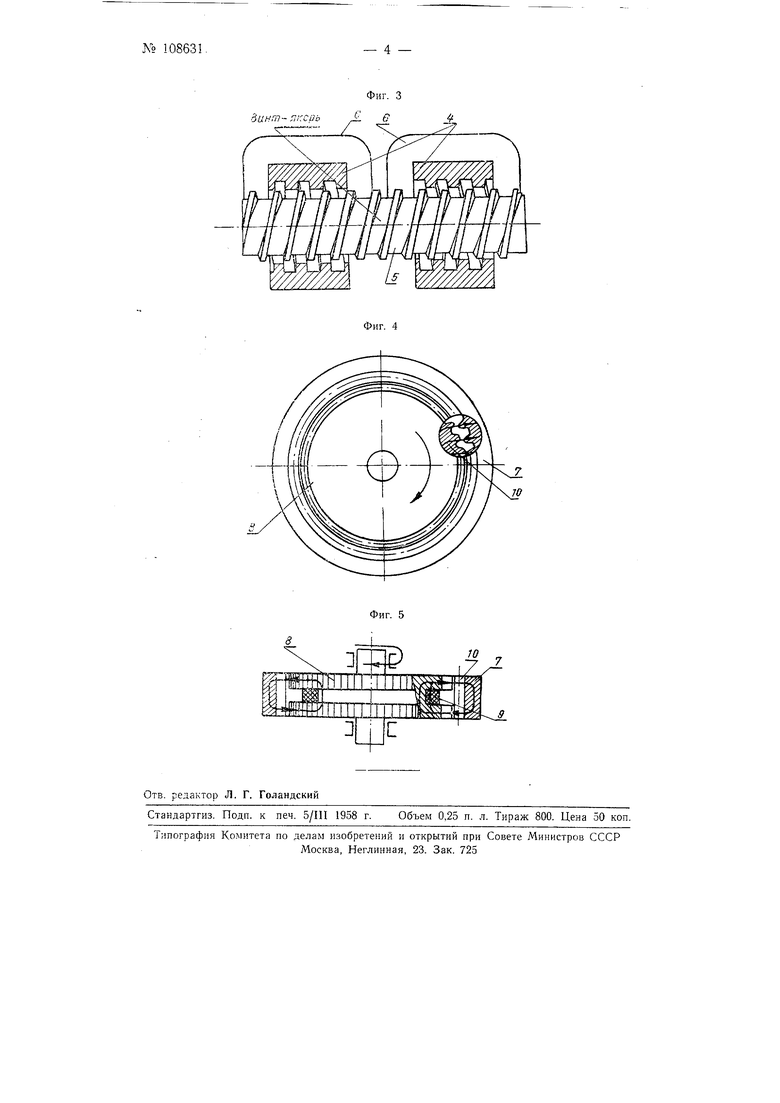
На фиг. 1 изображена принципиальная схема предлагаемого датчика; на фиг. 2 и 3 -схема его узла, обеспечивающего грубый отсчет линейных перемещений; на фиг. 4 и 5-схема узла датчика, обеспечивающего более точный их отсчет.
Предлагаемый датчик представляет собой комбинацию двух индуктивных датчиков, якори которых жестко связаны между собой. Первый датчик / (фиг. 1) с поворотным якорем производит грубый отсчет линейных перемещений какой-либо детали (например стола 2 металлообрабатывающего станка). Второй датчик 3 представляет собой индуктивный преобразователь вращательного движения и осуществляет более точный отсчет линейных перемещений стола 2 путем отсчета долей поворота якоря датчика /.
Электромагнитная система датчика / (фиг. 2) имеет полюса 4, выполненные в форме гаек, и поворотный якорь 5 в виде винта. На каждом полюсе расположена катущка(.
Полюса 4 установлены так, что их зубцы сдвинуты один относительно другого на произвольное число плюс толщина зубца якоря 5. Такой сдвиг создает дифференциальность индуктивной системы, а
следовате.ЛзНС, и повышенную чувствительность в работе.
При перемещении винтообразного якоря 5 вдоль оси или повороте вокруг оси грапи его резьбы (зубцы) приближаются к зубцам одного полюса 4 и отдаляются от зубцов другого полюса. При этом равновесие в плечах электрической схемы моста, куда включены обмотки полюсов, нару1нается.
Когда воздушный зазор между зубцами якоря и обоих полюсов становится одинаковым, в схеме наступает равновесие, что регистрируется нулевым положением стре.лки электроизмерительного прибора - электроиндикатора, при этом подается командный импульс иа исполнительный механизм.
Для повышепия моихности и чувствительности датчика необходимо, чтобы в каждом полюсе располагалось примерно 8-10 зубцов. Это увеличивает проводимость магнитного потока и устраняет ои1ибки при изготовлении якоря.
Шаг нарезки якоря и сердечников одинаков и может быть принят 5 мм, а толщииа нитки 1,25 мм.
Электромагнитная система датчика 5 (фиг. 4 и 5) имеет поворотный зубчатый якорь, выполненный в виде шестерни, и неподвижный полюс 7 - в виде зубчатого венца.
На якоре 8 расположена катушка Я включенная в измерительную схему. При прохождении тока катушка 9 создает магнитный поток JO, который замыкается через зубцы шестерни и венца по всей окружности.
Однако величина лгагнитного потока 10, а следовательно, и тока в катушке 9 при повороте шестерни будет изменяться пропорционально изменению воздушного промежутка между зубьями шестерн ; и венца.
Таким образом, каждому положению шестерни в пределах одного шага соответствует определенная величина магнитного потока и тока в катушке 9.
Для осуществления углового отсчета в измерительную схему введена вспомогательная катушка, имеющая постоянные индуктивность и ток, соответствующие одному определенному взаимному расположению шестерни и венца датчика 5 в пределах одного щага. Когда шестерня будет находиться в этом положении, сопротивления катушки 9 и вспомогательной бздут одинаковыми, что регистрируется нулевым положением стрелки электроиндикатора. При дальнейшем повороте шестерни электрическая симметричность измерительной схемы нарушается и стрелка электроиндикатора отклоняется соответственно угл} и направлению поворота в ту или иную сторону от нуля.
Таким o6pa30 ii, создается возможность деления окружности на столько равных частей, сколько зубьев содержат в себе шестерня и венеп датчика 3.
Предмет изобретения
Индуктивный датчик линейных перемещений, выполненный согласно авт. св. № 95261, т. е. с электромагнитной системой, полюса которой имеют форму гаек, и с якорем в виде винта, отличающийся тем, что, с целью повышения точности отсчета перемещения, поворотный винтообразный якорь жестко соединен с кольцеобразным зубчатым якорем индуктивного преобразователя вращательного движения, поворотная электромагнитная система которого имеет полюса в виде зубчатых венцов.
Ж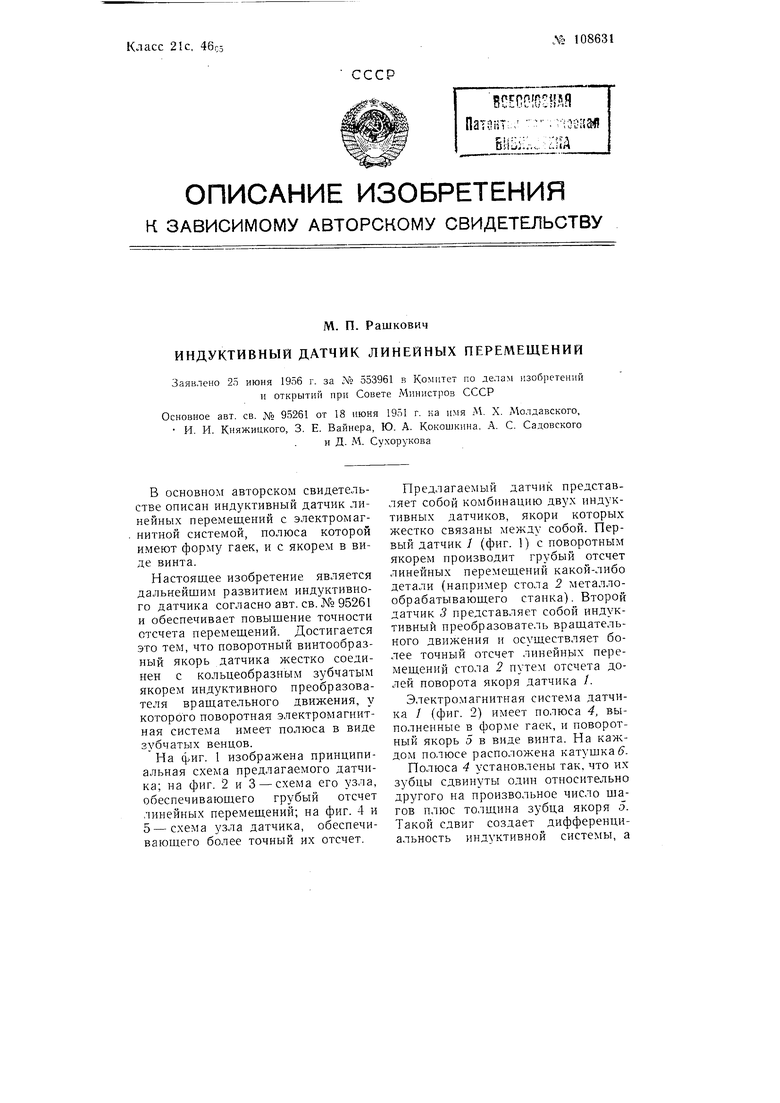
| название | год | авторы | номер документа |
|---|---|---|---|
| Индукционный датчик | 1958 |
|
SU124140A2 |
| Устройство для ориентации лопатки относительно инструмента с равномерным распределением припуска по перу | 1958 |
|
SU132038A1 |
| Импульсный электромагнитный двигатель | 1957 |
|
SU114357A1 |
| Индуктивный датчик | 1960 |
|
SU132032A1 |
| Предохранительное устройство для предотвращения поломки сверл и обеспечения вывода их из отверстия при перегрузке | 1960 |
|
SU134544A1 |
| Индуктивный датчик | 1957 |
|
SU112464A2 |
| ПРИВОД СКРЕБКОВОГО КОНВЕЙЕРА И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КРУТЯЩЕГО МОМЕНТА | 1995 |
|
RU2087396C1 |
| Устройство для торможения асинхронного двигателя | 1961 |
|
SU150916A1 |
| Способ торможения асинхронного двигателя | 1961 |
|
SU149827A1 |
| Устройство для дистанционной передачи угла поворота | 1943 |
|
SU67547A1 |