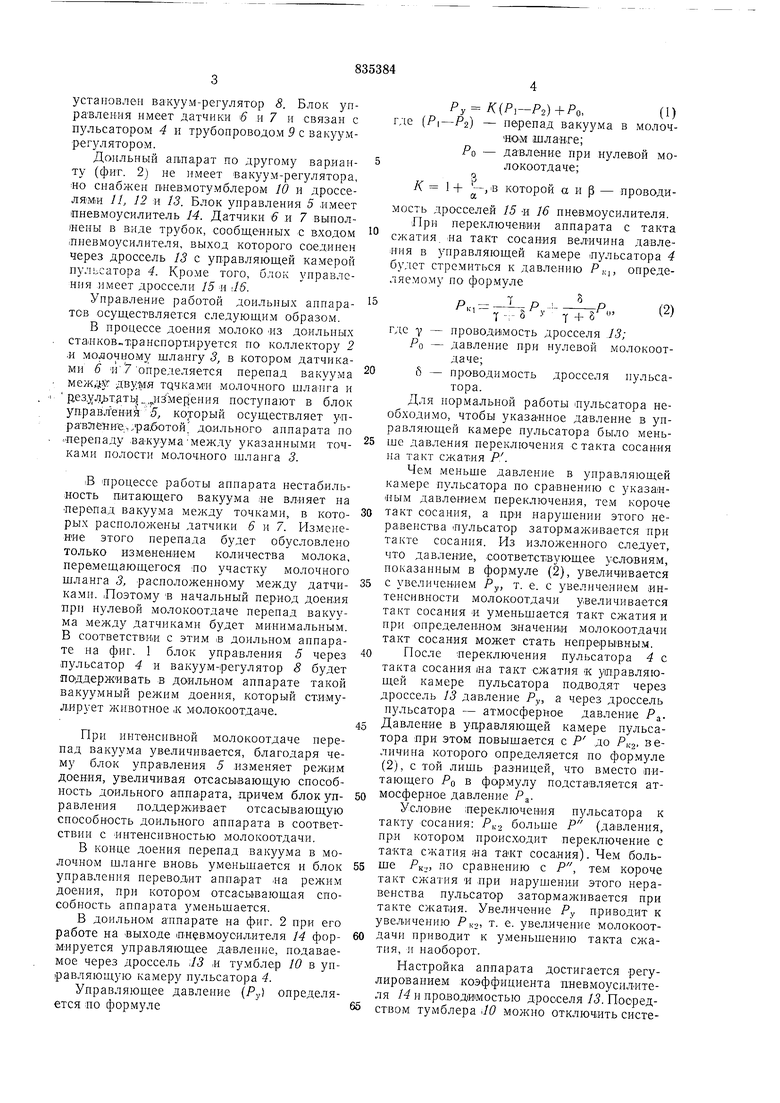
установлен вакуум-регулятор 8. Блок управления имеет датчики 6 н 7 и связан с пульсатором 4 и трубопроводом 9 с вакуумрегулятором.
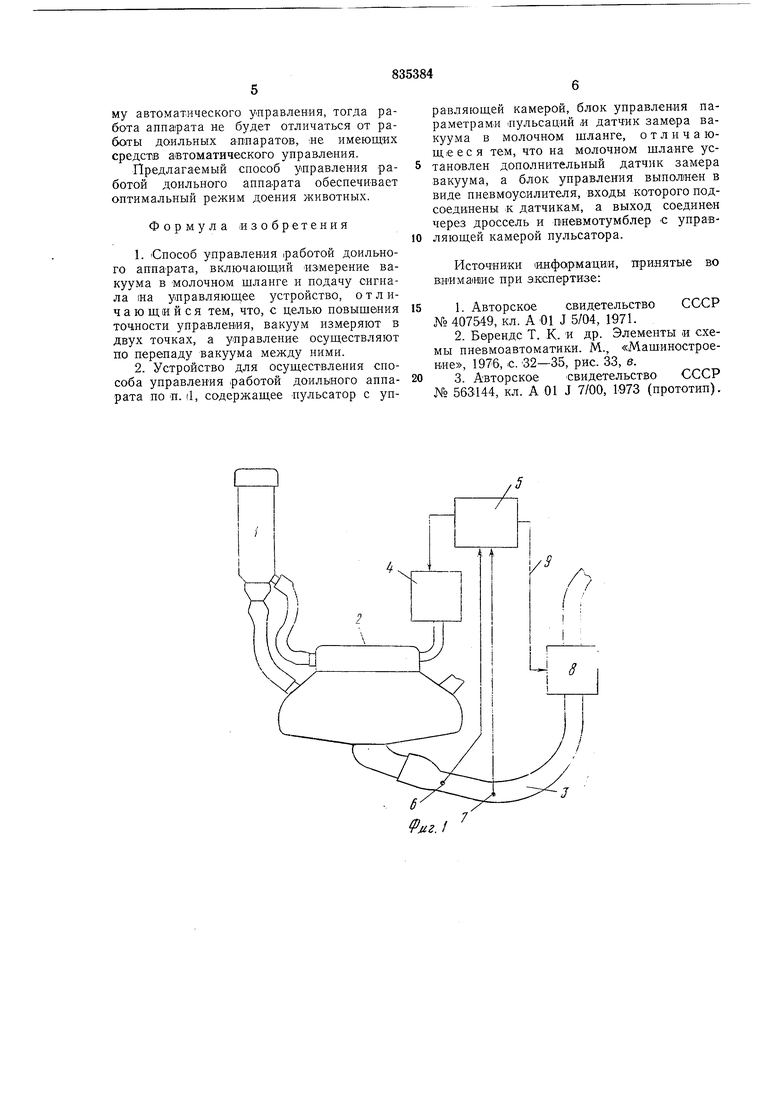
Доильный апиа.рат по другому варианту (фиг. 2) не имеет вакуум-регулятора, «о снабжен п невмотумблером 10 и дросселями //, /2 и 13. Блок управления 5 -имеет пневмоусилитель 14. Датчики 6 и 7 выпол1нены в в,иде трубок, сообщенных с входом (Пневмозсилителя, выход которого соедииен через дроссель / с управляющей камерой пульсатора 4. Кроме того, блок управления имеет дроссели 15 и tl6.
Управление работой доильных аппаратов осуществляется следующим образом.
В ироцессе доения молоко ИЗ доильных стаа1ков.-траисиорт.ируется по коллектору 2 н МОлочному шлангу 3, в котором датчиками 6 И 7определяется перепад вакуума между двумя тдчками молочного шлаига и рез.ул тать;,.,.измерения поступают в блок управления :5, который осуществляет управление,,,работой. до-ильного аппарата по .перепаду ва куума-между указанными точками полости молочного шланга 3.
В тгроцессе работы аппарата нестабильность питающего вакуума яе влияет па перепад вакуума между точками, в которых расположены датчики 6 и 7. Изменение этого перепада будет обусловлено только изменением количества молока, перемещающегося :по участку молочного шланга 3, расположенному между датчиками. .Поэтому В начальный период доения при нзлевой молокоотдаче перепад вакуума между датчиками будет минимальным. В соответствии с этим IB доильнОлМ аппарате на фиг. 1 блок управления 5 через пульсатор 4 и вакуум-регулятор 8 будет поддерживать в доильном аппарате такой вакуумный режим доеиия, который стимулирует животное ,к молокоотдаче.
При иитенсивиой молокоотдаче перепад вакуума увеличивается, благодаря чему блок управления 5 изменяет релшм доения, увеличивая отсасывающую способность доильного аппарата, дричем блок управления поддерживает отсасывающую способность доильного аппарата в соответствии с интенсивностью молокоотдачи.
В конце доения перепад вак)ума в молочном шланге вновь уменьшается и блок управления переводит аппарат иа режим доения, при котором отсасывающая способность аппарата уменьшается.
В доильном аппарате на фиг. 2 при его работе на выходе лневмоуспдителя 14 формируется управляющее да-влепие, подаваемое через дроссель ,13 и тумблер 10 в управляющую камеру пульсатора 4.
Управляющее давление (Ру) определяется но формуле
,-Р,}+Р,,(1)
где () - перепад вакуума в молочном шланге;
РО - давление при нулевой молокоотдаче;
о
к + -,В которой аир - проводимость дросселей 15 и 16 пневмоусилителя.
При переключении аппарата с такта сжатия, иа такт сосания величина давления в управляющей камере п льсатора 4 будет стремиться к давлению PKJ, определяемому по формуле
Т, 2
Г
где 7 - проводи1мость дросселя .13;
РО - давление при нулевой молокоотдаче;
б - проводимость дросселя иульсатора.
Для нормальной работы лульсатора необходимо, чтобы указанное давление в уиравляющей камере п)льсатора было меньше давления иереключеиия с такта сосания иа такт сжатия Р .
Чем меньше давление в управляющей камере пульсатора по ераВнению е указанным давлением переключения, тем короче
такт сосания, а при нарушении этого неравенства пульсатор затормаживается при такте сосаиия. Из изложеииого следует, что давление, соответствующее условиям, показанным в формуле (2), увеличивается
е увеличением Ру, т. е. с увеличением интенсивности молокоотдачи увеличивается такт сосания и уменьшается такт сжатия и при определенном 31иачени.и молокоотдачи такт сосания может стать непрерывным.
После нереключения пульсатора 4 с такта сосания иа такт сжатия ж управляющей камере пульсатора подводят через дроссель 13 давление Ру, а через дроссель пульсатора - атмосферное давление РаДавление в удравляющей камере пульсатора при этом повышается с Р до Рк2. величина которого определяется по фор.муле (2), с той лишь разницей, что вместо иитающего РО в формулу подставляется атмосферное давление Рд.
Условие нереключения пульсатора к такту сосания: Р,,., больше Р (давления, при котором проис.х1одит переключение с такта сжатия на такт сосания). Чем больше PKJ, по сравнению с Р, тем короче такт и при нарушении этого неравенства пульсатор затормаживается при такте сжатия. Увеличение Ру приводит к увеличению PKJ. т. е. увеличение молокоотдачи приводит к уменьшению такта сжатия, наоборот.
Пастройка аппарата достигается регулированием коэффициента пневмоусилителя М и про.во.Д|И1мостью дросселя 13. Посредством тумблера JO можно отключить систему автоматического управления, тогда работа не будет отличаться от работы доильных аппаратов, ле имеющих средств автоматического управления.
Предлагаемый способ управления работой доильного аппарата обеспечивает оптимальный режим доения животных.
Формула изобретения
1.Способ управления |работой доильного аппарата, включающий измерение вакуума в молочном шланге и подачу сигнала на управляющее устройство, отличающийся тем, что, с целью повышения точности управления, вакуум измеряют в двух точках, а управление осуществляют по перепаду вакуума между ними.
2.Устройство для осуществления снособа управления работой доильного аппарата по П. (1, содержащее пульсатор с управляющей камерой, блок управления параметрами пульсаций и датчик замера вакуума в молочном щланге, отличающееся тем, что на молочном щланге установлен дополнительный датчик замера вакуума, а блок управления выполиен в виде пневмоусилителя, входы которого подсоединены к датчикам, а выход соединен через дроссель и ппевмотумблер с унравляющей камерой пульсатора.
ИстоЧники (Информации, тгринятые во внимание при эхспертизе:
1. Авторское свидетельство СССР № 407549, кл. А 01 J 5/04, 1971.
2. Бврендс Т. К. и др. Элементы и схемы пневмоавтоматики. М., «Машиностроение, 1976, с. -32-35, рис. 3.3, в.
3. Авторское свидетельство СССР № 563.144, кл. А 01 J 7/00, 1973 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| ДВУХТАКТНЫЙ ДОИЛЬНЫЙ АППАРАТ ПОПАРНОГО ДОЕНИЯ | 2018 |
|
RU2681886C1 |
| ДОИЛЬНЫЙ АППАРАТ | 2016 |
|
RU2626169C2 |
| ДОИЛЬНЫЙ АППАРАТ | 2017 |
|
RU2645336C1 |
| СПОСОБ МАШИННОГО ДОЕНИЯ И ДОИЛЬНЫЙ АППАРАТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2737207C2 |
| ДОИЛЬНЫЙ АППАРАТ | 1997 |
|
RU2122318C1 |
| Двухрежимный доильный аппарат | 1982 |
|
SU1069729A1 |
| Электромагнитный пульсатор доильного аппарата попарного действия | 2022 |
|
RU2782594C1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО ИЗМЕНЕНИЯ РЕЖИМА | 1969 |
|
SU257911A1 |
| КОЛЛЕКТОР ДОИЛЬНОГО АППАРАТА | 2006 |
|
RU2337533C1 |
| ДОИЛЬНЫЙ АППАРАТ | 2017 |
|
RU2646622C1 |
/
J
г /
П
П .
