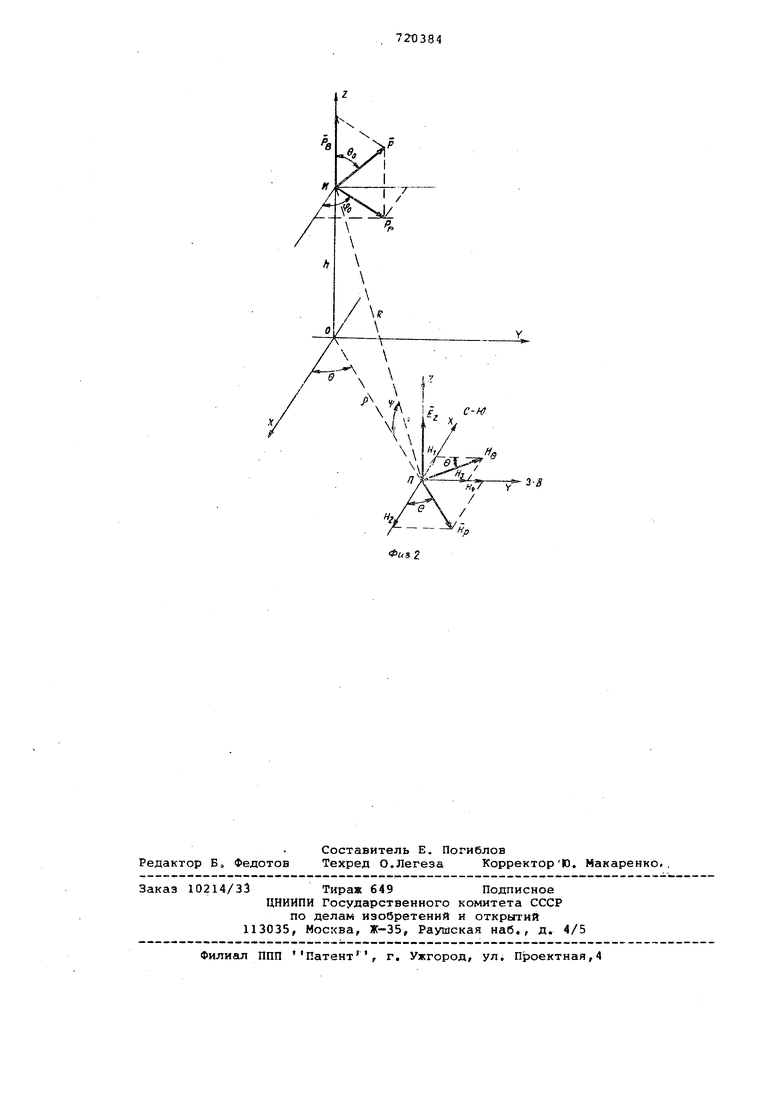
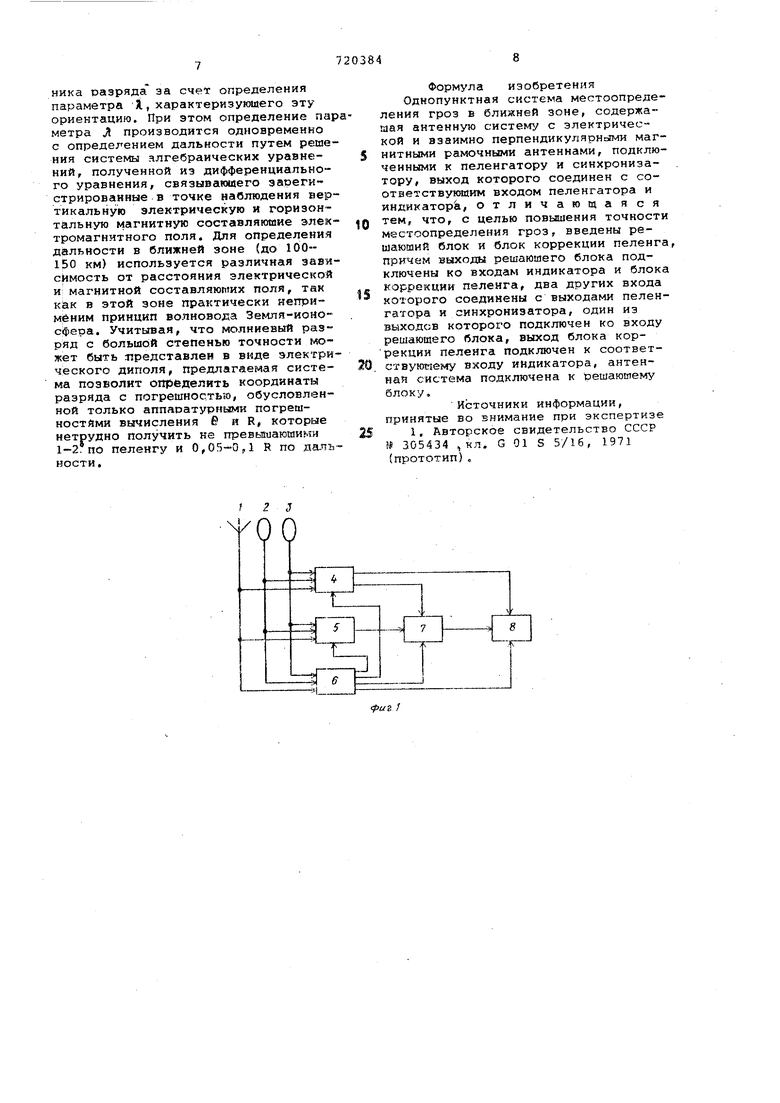
Изобретение относится к радионавигации и может использоваться для определения местоположения источника грозовых разрядов из одной точки наблюдения. Известна однопунктная система местоопределения гооз в ближней зоне содержащая антенную систему с электрической и взаимно перпендикулярными магнитными рамочными антеннами подключенными к пеленгатору и синхронизатору, выход которого соединен с соответствующим входом пеленгатора и индикатора 1. Однако известная система имеет недостаточную точность. Цель изобретения - повышение точ ности местоопределения гроз. Для этого в однопунктную систему местоопределения гроз в ближней зоне содержащую антенную систему с электрической и взаимно перпендикулярным магнитными рамочными антеннами, подключенными к пеленгатору и синхронизатору, выход которого соединен с соответствующим входом пеленгатора и индикатора, введены решающий блок и блок коррекции пеленга, поичем выходы решающего блока подключены ко входам индикатора и блока коррекции пеленга, два других входа которого соединены с выходами пеленгатора и синхронизатора, один из выходов которого подключен ко входу решающего блока; выход блока коррекции пеленга подключен к соответствующему входу индикатора, антенная система подключена к решающему блоку. На Фиг. 1 изображена структурная электрическая схема предложенной системы, на фиг. 2 - диаграмма, поясняюшая ее работу. Система содержит антенную систему с электрической 1 и взаимно перпендикулярными магнитными рамочными антеннами 2 и 3, решающий блок 4,пеленгатор 5, синхронизатор б, блок 7 коррекции пеленга и индикатор 8. Система работает следующим образом. На фиг, 2 показаны пространственное положение излучателя в точке И и положение горизонтальных составляющих магнитного поля Hg, Но и вертикальной составляющей электрического поля EJ в точке наблюдения П. В качестве исходной выбрана прямоугольная система координат XYZ с центром О. Источник разряда характеризуется дипольным моментом Р, наклоненным под углом Qe к оси Z и, следовательно, имеюшим вертикальную Р и горизонтальную Р составляюшие. Ориентация горизонтальной составляющей Р характеризуется углом 0. Источник разряда находится на высоте h над плоскостью ХОУ и на расстоянии R от точки наблюдения П. Точка наблтз дения П расположёна в плоскости XOY. Пеленг источника разряда откосительно точки наблюдения хар теризуется углом В. Вертикальная состешляюшая Р источника разряда возбуждает в точке наблюден1|я вертикальную составляюшую Ej элек трического поля и горизонтальную составляющую На г агнитного поля,, которые описызаютсл выражениям1-п Е,ю,.о.)р-с«(Ш 1-1) .. . а (...-iiA4 .c,ob©j:P(i).y.l (2.) а горизонтальная состазляюшал Р.-, ис ЕоэОу;«дает в точке точника разряда наблюдения П соответственно
Ки Н
.Р
которые опксыЕаются ьыраже; кя 4и:
К
Е (i)-со5%5-1иЧсоз: 51 Щ:РЭД 5аРН-) °
)-co& j-sin (t Pi:t 3 (4)
где P(t) - днпольный момент источника; cf: C/R; К - коэффициент пропорциональности; С - скорость света; to - дизлектрическая проницаемость. ,6 . Составляюшие Ё и направлены вдоль оси S, а составляюгане Нд И в пространстве ортогональны, как показано на . Суммарная составляюшая вертикального электрического поля в точке наблюдения имеет зид:
Л Г W
)Ej-E еоь2с|).)Р)
-l-t-JX i-i-SJ , 7rT Pto FA-iP(tU(5)
Здесь -«Jbt t cp.i.
Тогда составляюшие Hg н Нр можно записать в следуюшен виде;
КС
)AP(t)(6) kc
,
Н1Р{-Ь):Д-НдЛ).(7)
Рассмотрим составляюшие поля, принимаемые взаимно перпендикулярными
Оценка пеленга В источника разряда определяется по соотношению ,
с-ю
з-в Из (9) н (11} получим
лпв H,.(t) 3-|пв-ЯС05в
Oi)
ig& «JsS i-9 5 cose А sine
Выражение (1,2) показывает, что оценка & является функцией двух переменных - действительного пеленга 0 и параметра пространственной ориентации источника излучения Л. Для азртикальього диполя.дВеличина Л равна нулю, и поэтому 6 О. Если же источник имеет горизонтальную составлямшую, то А v: О, и появляются так называемые голяризационные погрешности пеленгования,, которые могут достигать значительной величины (до 20-30°). В соответствии с (12) эти погрешности можно исключить, решая (12) относительно
АА
Sin® б1«в -Ясо5в
, . / I
С«в COJ§-ASin§
Таким образом, определяя с помощь пеленгатора 5 с рамочньзми магнитными антеннами 2 и 3 величину и зная величину jfS, ,можно исключить погрешности пеленгования, обусловленные наклоном источника разряда.,
Рассмотрим далее составляюши« E2(t) , HgCc) , Kjj(t) ,, определяемые выражениями (5), (6) и (7), Их можно, записать в следуюмем виде:
Ej.(t)--aEPtt)-miPi:t) РШ (4)
Hg(t))-APH)j OS) рамо-гными антеннам 2 и 3, ориентированными на север и запад. Рамочная антенна 2, ориентированная на север вдоль оси X, принимает составляю1яие Ht и Н являгошиеся проекциями Нд И на ось X. Эги составляюшие равны соответственно H WrH tsjne; (+)(t)cose- (g) Тогда суммарная составляющая в антенне 2 --ю-- 1 2% 5 ® ® Рамочная антенна 3, ориентированная на запад вдоль оси У, принимает состаяляюмие НэИ Н, являющиеся проекциями Og и на ось У. Эти составллюшме равны соответственно и,,.к,а..оза; н,(.,(. (Ю) Хогда суммарная составляюшая в антенне J . tij.e,a)H,H-(yt)(cx5se ;vsine CHO Hp(i) Abt (t«, (-f fe К , КС со4 «/со4в..(л) b coif ZTcCg ° A lie Отметим, что Hg(t) и H(t) отли чаются только амплитудным множите лем Л, изменяясь идентично во вр мени. Рассмотрим составляющие (14 (15) . В терминах преоР5оазования Лапласа можно записать У Ej(P)aP(P) (П) H(P)tP(P)) Здесь р-опёратор Лапласа, Отсюда Ез,(Р)Ъ1Р РЗ:Нз{Р) ) Во временной области получим 1)i:E(i)4E;(i)(t)mdkHg(t)mAiHg(t)- (20 Отсюда )Е;( Образуем Функционал 3 ;/t:NE)x.,E;((t.))HeCtfl i Как следует из (21), S эД только XO.,X,,,0,.4,,,L -( , ( mcUf Ч ma. i iTUI Учитывая, что подинтегоальное выражение (22) всегда положительн Л -О, Из (22) запишем получим ,. ловия Jmi.«. dl.o; 70-, (23) dx, dx, . Полученную систему управлений (23 можно записать в виде: АХ В,(24) Решая уравнение (24) относител но х , Xj , Xj, X,, , получим соотве ственно значения х°; х ; xj; Параметр х поопооционален дально так как о( д /« Величина m опред ляется из соотношения rr.-(lS) Учитывая, что m получим
.S- si5#-
Отметим, что значения Хд; х° не иэ- меняются, если He(t) в (20) подста60 Таким образом, предлагаемая система позволяет определить координаты источника грозовых разрядов, причем исключаются погрешности определения пеленга, обусловленные произвольной 65 ориентацией источвить (t) или Hjj.g (t) ; изменяются только значения х и х Таким образом, регистрируя в точке приема горизонтальную магнитную составляюгаую поля с помоыью рамочных магнитных антенн 2 и 3 и вертикальную электрическую составляющую поля с помощью электрической щтырьевой антенны 1, образуя из зарегистрированных составляющих систему уравнений (24), можно путем решения образованной системы уравнений определить параметры, характеризующие дальность R, и параметр пространственной ориентации Д источника разряда. Определив параметр X , можно в соответствии с (13) скорректировать показания пеленгатора 5 с целью исключения поляризационных ошибок измерения пеленга Таким образом, элект омагнитная волна, созданная грозовым разрядом, воспринимается антенной системой. Если величины сигналов,с выхода электрической 1 и любой из рамочных антенн 2 и 3 превышают заданный пороговый уровень, то срабатывает синхронизатор б и разрешает работу решающего блока 4 и пеленгатора 5, В решающем блоке 4 производится выбор наибольшего (по амплитуде) сигнала магнитных антенн 2, 3 и с выбранным сигналом и сигналом электрической антенны 1 производятся все необходимые операции для образования системьл уравнений (24) . Далее полученная система уравнений решается относительно Xj и х,, и затем по алгоритмам (25) и (26 определяется величина Д. Полученное значение Д поступает в блок 7 коррекции пеленга. Синхронизатор б разрешает также работу пеленгатора 5;, Пеленгатор 5 производит определение пеленга по соотношению амплитуд сигналов, принятых антеннами 2 и 3. Значение оценки пеленга поступает также в блок 7 коррекции пеленга. После того как закончены вычисления ё,А и R, , на блок 7 коррекции пеленга поступает разрешающий сигнал синхронизатора б. В блоке 7 коррекции пеленга производится вычисление действительного пеленга в соответствии с алгоритмом (13). После окончания вычисления Э на индикатор 8 с синхронизатора б поступает разрешающий сигнал для отображения полученных координат разряда. На информационные входы индикатора 8 поступают значения 9 с блока 7 коррекции пеленга и значение R С - Хц с решающего блока 4.
ника разряда за счет определения параметра Я, характеризующего эту ориентацию. При этом определение парметра Л производится одновременню с определением дальности путем решения системы алгебраических уравнений, полученной из дифференциального уравнения, связывагошего зарегистрирова.нные в точке наблюдения вертикальную электрическую и горизонтальную магнитную составляюшие электромагнитного поля. Для определения дальности в ближней зоне (до 100150 км) используется различная зависимость от расстояния электрической и магнитной составляющих поля, так как в этой зоне практически неприменим принцип волновола Земля-ионосфера, Учитывая, что молниевый разряд с больший степенью точности быть представлен в виде электрического диполя, предлагаемая система позволит определить координаты разряда с погрешностью, обусловленной только аппаратурными погрешностями вычисления в и R, которые нетрудно получить не превышающими 1-2. по пеленгу и 0,05-О,, R по дальности.
Формула изобретения Однопунктная система местоопределения гроз в ближней зоне, содержааая антенную систему с электрической и взаимно перпендикулярнсПад магнитными рамочными антеннами, подключенными к пеленгатору и синхронизатору, выход которого соединен с соответствующим входом пеленгатора и индикатор, отличающаяся тем, что, с целью повышения точности местоопределения гроз, введены решаюший блок и блок коррекции пеленга причем выходы решающего блока подключены ко входам индикатора и блока коррекции пеленга, два других входа которого соединены с выходами пеленгатора и синхронизатора, один из выходов которого подключен ко входу решающего блока, выход блока коррекции пеленга подключен к соответствуюиему входу индикатора, антенная система подключена к решаюшему блоку,
Источники информации, принятые во внимание при экспертизе
1, Авторское свидетельство СССР 305434 , кл. G 01 S 5/16, 1971 (прототип),
| название | год | авторы | номер документа |
|---|---|---|---|
| Однопунктная система местоопреде-лЕНия гРОз B ближНЕй зОНЕ | 1979 |
|
SU800922A1 |
| ОДНОПУНКТОВАЯ СИСТЕМА МЕСТООПРЕДЕЛЕНИЯ ГРОЗ В БЛИЖНЕЙ ЗОНЕ | 2002 |
|
RU2230336C2 |
| Устройство для определения местопо-лОжЕНия гРОз B ближНЕй зОНЕ | 1979 |
|
SU836611A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ МОЛНИЕВОГО РАЗРЯДА И МНОГОПУНКТОВАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2003 |
|
RU2253133C2 |
| ОДНОПУНКТОВЫЙ СПОСОБ МЕСТООПРЕДЕЛЕНИЯ ИСТОЧНИКА ЭЛЕКТРОМАГНИТНОГО ИЗЛУЧЕНИЯ | 1993 |
|
RU2054690C1 |
| Грозопеленгатор-дальномер | 1984 |
|
SU1187120A1 |
| Устройство для калибровки измерителей дальности до молниевых разрядов | 1980 |
|
SU938235A2 |
| ОДНОПУНКТОВАЯ СИСТЕМА МЕСТООПРЕДЕЛЕНИЯ ГРОЗ В БЛИЖНЕЙ ЗОНЕ | 2015 |
|
RU2599775C1 |
| Пассивный однопунктный грозолокатор | 1984 |
|
SU1306337A1 |
| Грозопеленгатор-дальномер | 1984 |
|
SU1201790A1 |