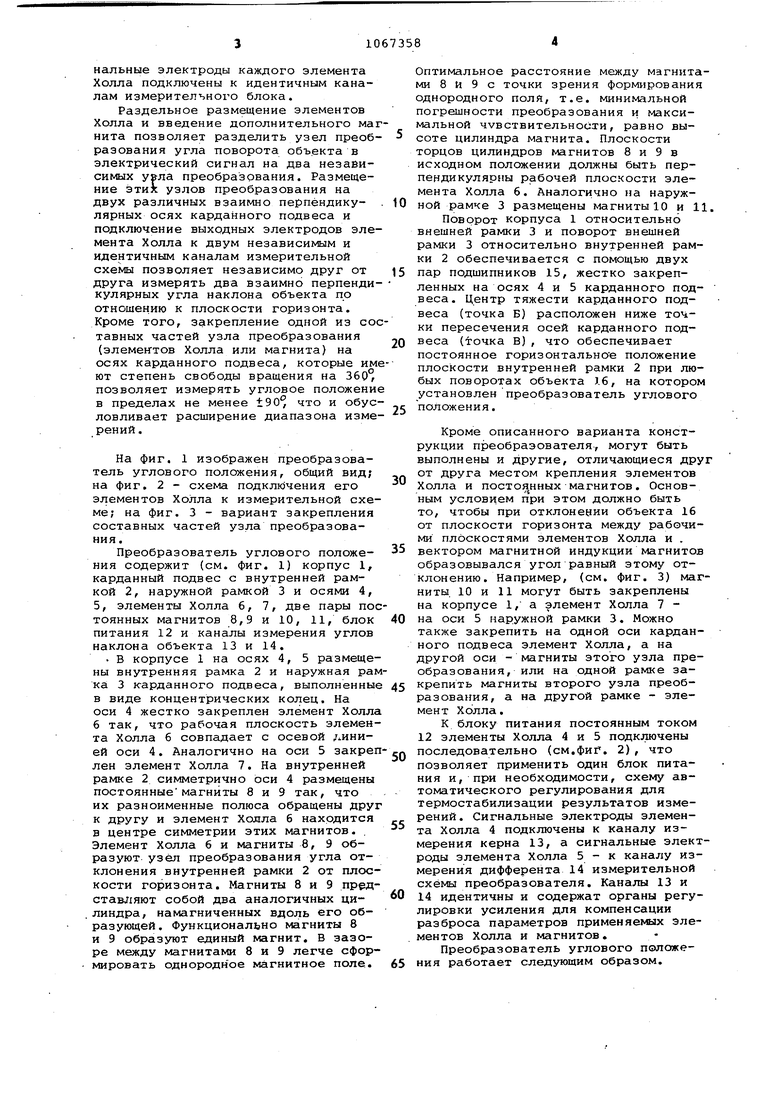
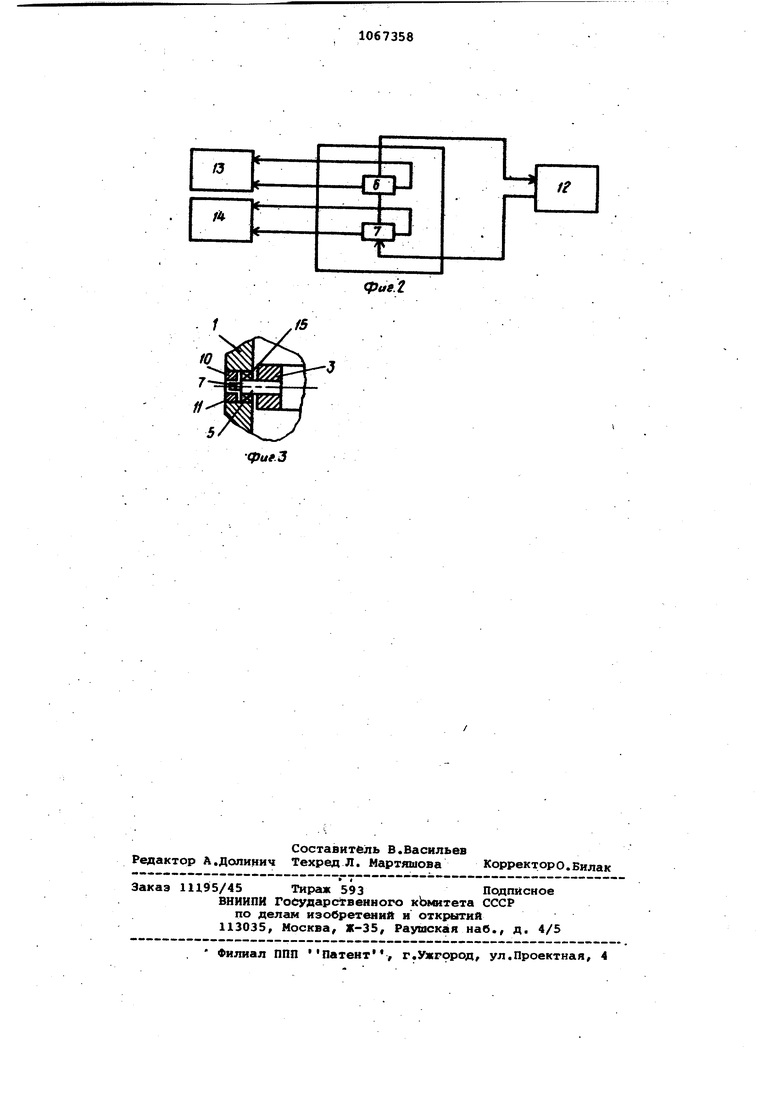
Изобретение относится к измерительной технике и может быть использовано для измерения углов наклона объектов относительно плоскости горизонта, в частности, при океанографических измерениях. H3BiecTHo устройство для измерения угла наклона объекта, содержащее карданный подвес, маятник, источ ники опорного магнитного поля, укрепленные на наружной рамке карданного подвеса, и феррозонд, установленный на внутренней рамке под углом 45 к ееоси вращения и перпендикулярно к ее вертикальной оси 1. Применение в этом устройстве феррозонда в качестве чувствительного элемента и наличие источников опорн го магнитного поля ведет к большому энергопотреблению, усложняет конструкцию и регулировку устройства. Известно также устройство, в кот ром для определения ориентации объе та относительно известного направле ния вектора магнитной индукции в ка честве чувствительных элементов при менены две пары скрепленных взаимно перпендикулярно элементов Холла. В Э.ТОМ устройстве два элемента Холла, укрепленные в карданном подвесе, находятся внутри воздушного зазора магнитной системы, жестко связанной с объектом, и служат для определения зенитного угла. Два других элемента Холла служат для определения угла азимута.С этой целью они снабж ны концент раторами,перпендикулярным их плоекости, и укреплены на конце длинного немагнитного стержня вместе с г рузом, образуя маятник 2. Применение в этом устройстве такого маятника .ограничивает диапазон измерений углов отклонения объекта от вертикали. Кроме того, это устройство позволяет определить только угол азимута и зенитный угол, в то время как в ряде случаев, например, в авиации и океанографии, требуется знать углы наклона объекта относительно плоскости горизонта в двух взаимно перпендикулярных плоскостях Наиболее близким к изобретению по технической сущности является датчик ориентации, содержащий карданный подвес, укрепленный на нем постоянный магнит, два ортогональных жестко связанных между собой эле мента Холла, помещенных в воздушном зазоре постоянного магнита, блок питания и фазосдвцгающие цепочки, к которым подключены элементы Холла В этом датчике постоянный магнит с /помощью карда1)ного подвеса сохраняет неизменным свое положение в пространстве. Выходной сигнал элементов Хйлла, помещенных в магнитное поле, является Функцией проекции вектора магнитной индукции этого поля на рабочую плоскость элемента Холла. Поэтому, .подключив выходные электроды элементов Холла к фазосдвигающим цепочкам, в этом датчике ориентации получают зенитный угол положения корпуса объекта 3, Недостатком известного устройства является то, что оно не позволяет определять углы наклона объекта относительно плоскости горизонта во взаимно перпендикулярных плоскостях (называемые в .судовождении углами крена и дифферента). Наличие в конструкции датчика ориентации держателя для установки элементов Холла в зазоре между полюсами ма/нита ограничивает угол отклонения магнита в одной из двух взаимно перпендикулярных плоскостей, проходящих через вертикаль. Например, при применении элементов Холла типа ПХЭ606817А с чувствительностью порядка 100 мкВ/мТл и необходимости получения разрешающей способности порядка 1,5° расстояние между полюсами магнита должно быть не более 10 -мм, что дает угол отклонения объекта не более135°в плоскости, проходящей через держатель элементов Холла. Увеличение измеряемого угла отклонения объекта в этой плоскости требует увеличения расстояния между поЛюсами магнита, что ведет к ослаблению выходного сигнала, а также к нарушению однородности магнитного поля в зоне расположения элементов Холла. Л это, в свою очередь, уменьшает разрешающую способность датчика и увеличивает погрешность преобразования. Цель изобретения - независимое друг от друга измерение углов накло.на объекта относительно горизонта в двух взаимно перпендикулярных плоскостях и расширение диапазона измерения этих углов. Поставленная цель достигается тем, что в преобразователь углового положения объекта, содержащем соединенный с объектом карданный подвес, закрепленный в нем постоянный магнит, два элемента Холла, измерительный блок и блок питания, введен второй постоянный магнит, Jлeмeнты Холла размещены раздельно на двух взаимно перпендикулярных геометрических осях.карданного подвеса, причем рабочие плоскости элементов Холла совпадают с соответствующими геометрическими осями карданного подвеса, каждый элемент Холла находится между разноименными полюсами одного из магнитов, векторы магнитной индукции перпендикулярны геометрическим осям, на которых размещены соответствующие элементы Холла, а постоянные магниты либо элементы Холла закреплены на карданном подвесе с возможностью вращения относительно друг друга, сигнальные электроды каждого элемента Холла подключены к идентичным каналам измерительного блока. Раздельное размещение элементов Холла и введение дополнительного ма нита позволяет разделить узел преоб раэования угла поворота объекта в электрический сигнал на два независимых увла преобразования. Размещение этих узлов преобразования на двух различных взаимно перпёндикулярных осях карданного подвеса и подключение выходных электродов эле мента Холла к двум независимым и идентичным каналам измерительной схемы позволяет независимо друг от друга измерять два взаимно перпенди кулярных угла наклона объекта по отношению к плоскости горизонта. Кроме того, закрепление одной из со тавных частей узла преобразования (элементов Холла или магнита) на осях карданного подвеса, которые им ют степень свободы вращения на 360° позволяет измерять угловое положени в пределах не менее ±90 что и обус ловливает расширение диапазона изме рений. На фиг. 1 изображен преобразователь углового положения, общий вид; на фиг. 2 - схема подключения его элементов Холла к измерительной схеме; на фиг. 3 - вариант закрепления составных частей узла преобразования. Преобразователь углового положения содержит (см. фиг. 1) корпус 1, карданный подвес с внутренней рамкой 2, наружной рамкой 3 и осями 4, 5, элементы Холла 6, 7, две пары по тоянных магнитов 8,9 и 10, 11, блок питания 12 и каналы измерения углов наклона объекта 13 и 14. . В корпусе 1 на осях 4, 5 размещены внутренняя рамка 2 и наружная рам ка 3 карданного подвеса, выполненны в виде концентрических колец. На оси 4 жестко закреплен элемент Холла 6 так, что рабочая плоскость элемента Холла 6 совпадает с осевой линией оси 4. Аналогично на оси 5 закреп лен элемент Холла 7. На внутренней рамке 2 симметрично оси 4 размещены постоянныемагниты 8 и 9 так, что их разноименные полюса обращены друг к другу и элемент Холла 6 находится в центре симметрии этих магнитов. . Элемент Холла 6 и магниты 8, 9 образуют узел преобразования угла отклонения внутренней рамки 2 от плоскости горизонта. Магниты 8 и 9 представляют собой два аналогичных цилиндра, намагниченных вдоль его образующей. Функционально магниты 8 и 9 образ5пот единый магнит. В зазоре между магнитами 8 и 9 легче сформировать однородное магнитное поле. Оптимальное расстояние между магнитами 8 и 9 с точки зрения формирования однородного поля, т.е. минимальной погрешности преобразования и максимальной чувствительности, равно высоте цилиндра магнита. Плоскости торцов цилиндров магнитов 8 и 9 в исходном положении должны быть перпендикулярны рабочей плоскости элемента Холла 6. Аналогично на наружной рамке 3 размещены магниты 10 и 11. ПОВОРОТ корпуса 1 относительно внешней рамки 3 и поворот внешней рамки 3 относительно внутренней рамки 2 обеспечивается с помощью двух пар подшипников 15, жестко закрепленных на осях 4 и 5 карданного подвеса. Центр тяжести карданного подвеса (точка Б) расположен ниже точки пересечения осей карданного подвеса (точка В), что обеспечивает постоянное горизонтальное положение плоскости внутренней рамки 2 при любых поворотах объекта J.6, на котором установлен преобразователь углового положения. Кроме описанного варианта конструкции преобразователя, могут быть выполнены и другие, отличающиеся друг от друга местом крепления элементов Холла и постоя нных магнитов. Основным услов1 ем при этом должно быть то, чтобы при отклонении объекта 16 от плоскости горизонта между рабочими плоскостями элементов Холла и . вектором магнитной индукции магнитов образовывался угол равный этому отклонению. Например, (см. фиг. 3) магниты. 10 и 11 могут быть закреплены на корпусе 1, а элемент Холла 7 на оси 5 наружной рамки 3. Можно также закрепить на одной оси карданного подвеса элемент Холла, а на другой оси - магниты этого узла преобразования, или на одной рамке закрепить магниты второго узла преобразования, а на другой рамке - элемент Холла. К блоку питания постоянным током 12 элементы Холла 4 и 5 подключены последовательно (см.фиГ. 2), что позволяет применить один блок питания и, при необходимости, схему автоматического регулирования для термостабилизации результатов измерений. Сигнальные электроды элемента Холла 4 подключены к каналу измерения керна 13, а сигнальные электроды элемента Холла 5 - к каналу измерения дифферента 14 измерительной схемы преобразователя. Каналы 13 и 14 идентичны и содержат органы регулировки усиления для компенсации разброса параметров применяекых элементов Холла и магнитов. Преобразователь углового положения работает следующим образом.
В исходном положении, т.е. когда объект 16 находится в горизонтальном положении, рабочая плоскость элмента Холла 6 параллельна вектору магнитйой индукции магнитов 8, 9, и на сигнгшьных электродах элемента Холла 6 присутствует только остаточное напряжение, которое легко скомпенсировать в схеме измерителя. При произвольном наклоне объекта 16 плоскость N внутренней .рамки 2 остаетс я горизонтальной. При этом внешняя рамка 3 с внутренней рамкой 2 образуют угол керна, а корпус 1 поворачивается относительно внешней рамки 3 на угол дифферента. Таким образом, между рабочей плоскостью элемента Холла 6 и вектором магнитной индукции магнитов 8, 9 образуется угол равный углу крена, и на сигнальных электродах элемента Холла 6 фсчрмируется напряженке прямо пропорциональное синусу этого угла.
При этом знак напряжения соответствует направлению отклонения объекта от,плоскости горизонта.
Аналогично работает элемент Холла 7 с магнитами 10, 11 в угле преобразования угла дифферента.
Е сравнении с устройством-прототипом изобретение имеет возможность измерять два угла наклона объекта относительно плоскости горизонта вместо одного угла (зенитного), причем диапазон измерения расширен с. 19(Я при сохранении того же расстояния между полюсами магнитов,
5 что и в прототипе. Ксжструкция изобретения позволяет сблизить полюса магнитов до 3 ко4, что повышает амплитуду выходного сигнала примерно в три рада (по сравнению с прототи0 пом) и позволяет получить разре-. шающую способность преобразования порядка 0,5

| название | год | авторы | номер документа |
|---|---|---|---|
| ИНКЛИНОМЕТР | 1998 |
|
RU2172828C2 |
| ИНКЛИНОМЕТР (ВАРИАНТЫ) | 1998 |
|
RU2134427C1 |
| Магнитный компас | 1980 |
|
SU932233A1 |
| ИНКЛИНОМЕТР | 2003 |
|
RU2247942C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ БУРОВОЙ СКВАЖИНЫ (ЕГО ВАРИАНТЫ) | 2004 |
|
RU2261324C1 |
| БЕСКОНТАКТНЫЙ ПРОГРАММИРУЕМЫЙ ДАТЧИК АБСОЛЮТНОГО УГЛОВОГО ПОЛОЖЕНИЯ В 360° | 2006 |
|
RU2312363C1 |
| Двухкомпонентный датчик ускорения | 1988 |
|
SU1569724A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ГРАВИТАЦИОННОГО И ВОЛНОВОГО ПОЛЕЙ | 2003 |
|
RU2260199C2 |
| ЭЛЕКТРОМАГНИТНЫЙ ДАТЧИК УГЛА ВРАЩАЮЩЕГОСЯ РОТОРА ГИРОСКОПА | 1979 |
|
RU2107261C1 |
| ПРОГРАММИРУЕМЫЙ БЕСКОНТАКТНЫЙ ДАТЧИК УГЛОВОГО ПОЛОЖЕНИЯ С ЛИНЕЙНЫМ УГЛОВЫМ ДИАПАЗОНОМ В ПРЕДЕЛАХ 360° | 2006 |
|
RU2317522C2 |
ПРЕОБРАЗОВАТЕЛЬ УГЛОВОГО ПОЛОЖЕНИЯ ОБЪЕКТА, содерка|ВЦ й соединенный с объектом карданный подвес, закрепленный IB нем постоянный магнит, два элемента Холла, измерительный блок и блок питания, отличающийся тем, что, с целью независимого измерения углов наклона объекта в каждой из двух взаимно перпендикулярных плоскостях и расширения диапазона измерения, в него дополнительно введен второй постоянный магнит, элементы Холла размерены раздельно на двух взаимно перпендикулярных геометрических осях карданного псздвеса, причем рабочие плос кости элементов Холла совпадают с соответствуюв ми геометрическими ОСЯМ1 карданного подвеса, каждый Холла находится между разиоИ11ЮННЫМ1 полюсами одного из магнитов, векторы магнитной индукции перпендикулярны геометрическим осям, г на которых размещены соответствующие элементы Холла, a постоянные магниты либо элементы Холла закреплены на карданном подвесе с возможностью Вргицения относительно друг друга, сигнальные электроды каждого элемента Холла подключены к иден.тичньт каналам измерительного блока-i о ч1 DO СП эо
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Указатель вертикали | 1974 |
|
SU541524A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Ориентирующее устраЛстяо на Холла.-Прибо ж и система управления, 1972, W 7 | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
