Изобретение относится к автомобильному электронному приборостроению и может быть непосредственно использовано в электронных системах управления автомобилем для определения угла открытия дроссельной заслонки, степени нажатия педали акселератора, положения клапана рециркуляции отработавших [азов, в других автомобильных системах, требующих получения аналогового или ШИМ-сигнала об абсолютном угловом положении вращающегося объекта (вала), а также для бесконтактного детектирования абсолютного углового положения большого числа вращающихся объектов во многих других отраслях легкой и тяжелой промышленности.
Аналогом заявляемого датчика является датчик положения педали акселератора (United States Patent 4915075 от 10 апреля 1990 года).
Устройство включает установленные в педаль потенциометр и плату со схемой формирования ШИМ-сигнала с выходным рабочим циклом, пропорциональным положению педали.
К недостаткам данного устройства относятся подверженность износу, характерная для потенциометров, малый срок службы, невысокая надежность, чувствительность к вибрации и пыли.
Аналогом заявляемого устройства является датчик углового положения с устройством Холла и постоянным магнитом заданной формы (United States Patent 5159268 от 27 октября 1992 года.).
В описании устройства указываются два предпочтительных варианта формы магнита - продолговатой и колоколообразной формы, позволяющие добиться высокой линейности при его вращении.
Недостатком данного устройства является сложность магнитной системы. необходимость использования магнитов специальной формы и применения расчетных математических методов.
Аналогом заявляемого устройства является магнитный датчик углового положения с улучшенной выходной линейностью (United States Patent 5444369 от 22 августа 1995 года).
Устройство использует массивные стационарные аксиальные магнитопроводы и вращающийся магнитопровод, к которому прикреплен один или более магнитов.
К недостаткам данного устройства относятся громоздкость, конструктивная сложность, необходимость применения при разработке устройства как расчетных методов, так и настройки и регулировки, отсутствие адаптированности к специальным требованиям, предъявляемым к механике автомобильных датчиков, работающих в ограниченном диапазоне угла поворота.
Аналогом заявляемого устройства является датчик положения педали с магнитом. движущимся относительно датчика магнитного поля, локализованного в статорном канале (United States Patent 6577119 от 10 июня 2003 года).
Устройство представляет собой бесконтактный датчик положения, в котором поверхность статора включает две области магнитного материала, магнит механически связан с ножной педалью акселератора, относительное движение которой вдоль одного или двух датчиков Холла в статорном канале вызывает образование электрического сигнала, пропорционального перемещению магнита, который обрабатывается в интегрированных схемах датчиков и одной или двух внешних ASIC (Application Specific Integrated Circuit) с возможностями программирования, например, в EEPROM. линейной выходной характеристики и температурной компенсации, а также формирования сигнала для передачи по последовательному протоколу, например по шине CAN.
Недостатком данного устройства является сложность описываемой магнитной системы, необходимость применения двух датчиков Холла для повышения точности измерений, одной или двух внешних интерфейсных ASIC для реализации необходимого интерфейса.
Аналогом заявляемого устройства является датчик углового положения с двумя закрепленными на роторе радиальными магнитами, создающими рабочее ноле. которое при вращении ротора измеряется внешним датчиком магнитного поля (предпочтительно, магниторезистивным AMP - датчиком, или же датчиком Холла) (United States Patent 6806702 от 19 октября 2004 года.).
Недостатком данного устройства является громоздкость, необходимость применения двух магнитов и одной или нескольких внешних ASIC - обработчиков мостового сигнала; функциональный угловой диапазон AMP - датчика не превышает 180°.
Прототипом заявляемого датчика является измерительное устройство для бесконтактного определения угла вращения (United States Patent 6534971 от 18 марта 2003 г.).
Данное устройство включает ротор, на котором расположен постоянный магнит, имеющий диаметральное направление намагниченности, и элемент Холла, расположенный асимметрично и описывающий эллиптическое вращательное движение постоянного магнита. При этом никакие концентраторы магнитного потока в данной конструкции не используются. Указанная магнитная система позволяет получить область выходной характеристики с крутой областью снижения и характерными плоскими областями.
Недостатком данного устройства является сужение диапазона измеряемого угла вследствие недостаточной однородности выходной характеристики (в описании изобретения указывается угловая область линейности до 80°, тогда как во многих случаях для эффективной работы датчика требуется измерять углы 100...120° и более, до 360° или, для некоторых типов устройств, углы в несколько полных оборотов).
Обычные линейные датчики на основе эффекта Холла, рекомендуемые для данного устройства-прототипа, имеют достаточно много недостатков: низкая чувствительность. дрейфы чувствительности, смещение и дрейфы смещения, и значительная нелинейность (до 3% в полном диапазоне, который обычно менее 90°).
В устройстве также отсутствуют специальные схемотехнические и механические средства адаптации к конкретным условиям работы.
Задачи изобретения - повышение точности измерений, линейности (абсолютных и относительных показателей линейности аналогового сигнала или дрейфа скважности ШИМ-сигнала), улучшение повторяемости, расширение механического углового диапазона, функционального диапазона и линейного участка измеряемого угла до любою значения в пределах 0-360°, увеличение чувствительности, развитие адаптационных признаков к конкретным условиям работы, в том числе осуществление прямого замещения аналоговых трехпроводных и двухпроводных (ШИМ) потенциометров и классических датчиков на основе эффекта Холла, повышение надежности, дальнейшее упрощение конструкции устройства и технологии его сборки и монтажа.
Поставленные задачи решаются тем, что в бесконтактном датчике углового положения, в котором ротор с магнитом осуществляет вращение в детектируемом угловом диапазоне относительно неподвижного статора - интегральной схемы (ИС) датчика магнитного поля на эффекте Холла, легкая ось намагниченности и основание диаметрально намагниченного цилиндрического магнита ротора при его вращении параллельны лицевой поверхности ИС - статора, представляющей собой программируемую в памяти EEPROM по двум или нескольким точкам калибровки ИС двухосевого углового энкодера, содержащего интегрированный крестообразный массив планарных элементов Холла, с аналоговым выходом или ШИМ-интерфейсом, формируемым по результатам оцифровки и цифровой обработки с использованием функции арктангенса сигналов интегрированного крестообразного массива планарных элементов Холла, чувствительных к градиенту компонентов рабочего магнитного поля, перпендикулярных лицевой поверхности ИС, снабженной интегрированным магнитоконцентрирующим (ИМК) диском (дисками), посредством которого выполняется преобразование параллельных компонентов поля в перпендикулярные лицевой поверхности ИС, которая запаяна способом поверхностного монтажа на печатной плате с компонентами схемы трехпроводного аналогового или двухпроводного ШИМ-датчика, магнит ротора в процессе сборки по результатам выравнивания жестко установлен в роторном узле, содержащем установочную втулку из материала, не проводящего магнитное поле, с выполненной в ней ориентирующей лыской или ориентирующим пазом для установки на вал с заданной начальной ориентацией и цилиндрическую или коническую возвратную пружину кручения и имеющем возможность поворота в корпусе на детектируемый в пределах полного механического углового диапазона устройства угол ϕ, ограниченный на крайних механических положениях упорами в основании корпуса и выступами установочной втулки ротора, для механической изоляции статора от движущихся механических частей и механического ограничения осевых перемещений роторного узла в датчике содержится внутренняя крышка-ограничитель, жестко фиксируемая в корпусе поверх роторного узла, датчик магнитного поля - двухосевой угловой энкодер Холла допускает выбор формата и программирование после сборки всего устройства основных параметров его аналоговой или ШИМ выходной характеристики - ограничивающих уровней выходного напряжения, точек калибровки, направления вращения, смещения и усиления (чувствительности) или программирование точек калибровки и чувствительности индивидуально для всех линейных участков выходной характеристики при многоточечной калибровке, разъем корпуса устройства содержит только функциональные выводы, используемые в дальнейшем процессе эксплуатации после программирования датчика, причем в процессе программирования устройства используются только функциональные выводы ИС.
Основание роторного диаметрально намагниченного цилиндрического постоянного магнита может быть круговым или кольцевым.
В частном случае для выравнивания магнит жестко устанавливается во втулке с пазами под отвертку, жестко устанавливаемой в роторном узле по результатам выравнивания магнита.
Для защиты датчика Холла от обратного напряжения, перенапряжения, короткого замыкания выхода, импульсных помех по цепи питания и выхода, если эта защита не предусмотрена в интегральной схеме (ИС) Холла, схема устройства, расположенная на плате датчика, содержит необходимые схемы защиты (стабилитрон, выпрямитель. конденсаторы фильтров).
Программируемый бесконтактный датчик углового положения с линейным диапазоном в пределах 360° показан на фиг.1-19.
На фиг.1-5 показана конструкция программируемого аналогового бесконтактного датчика положения дроссельной заслонки.
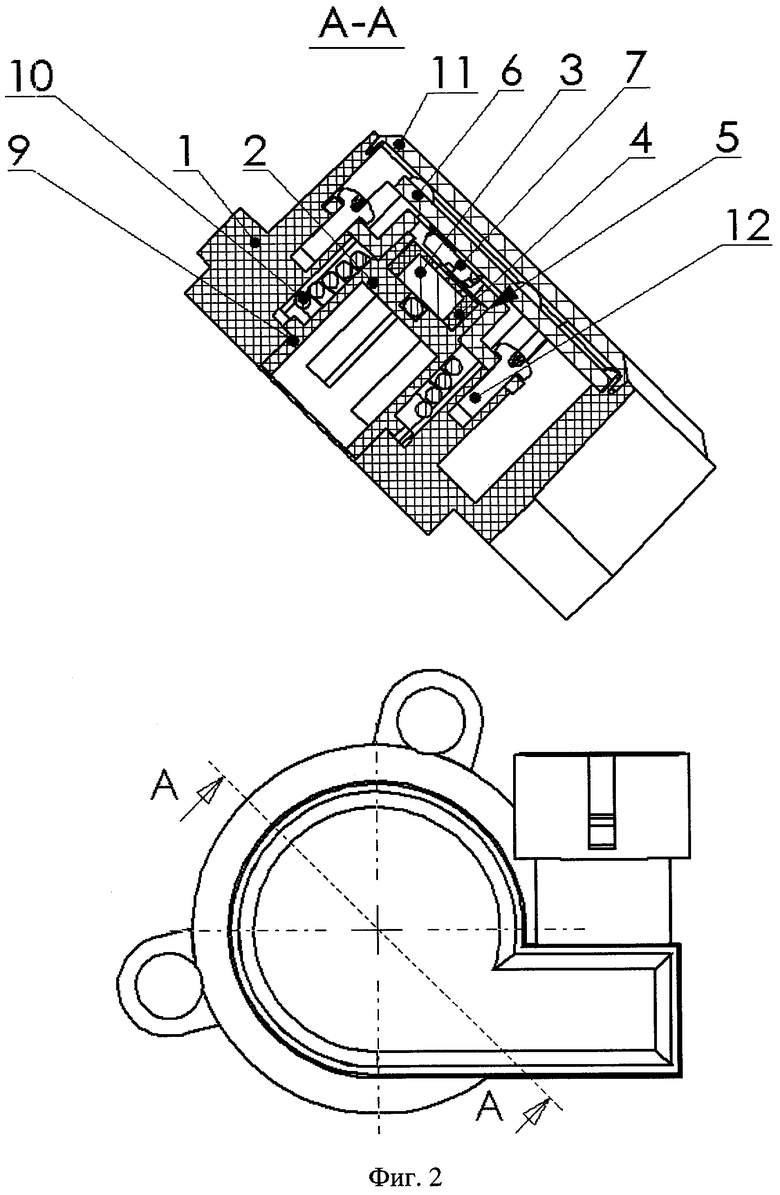
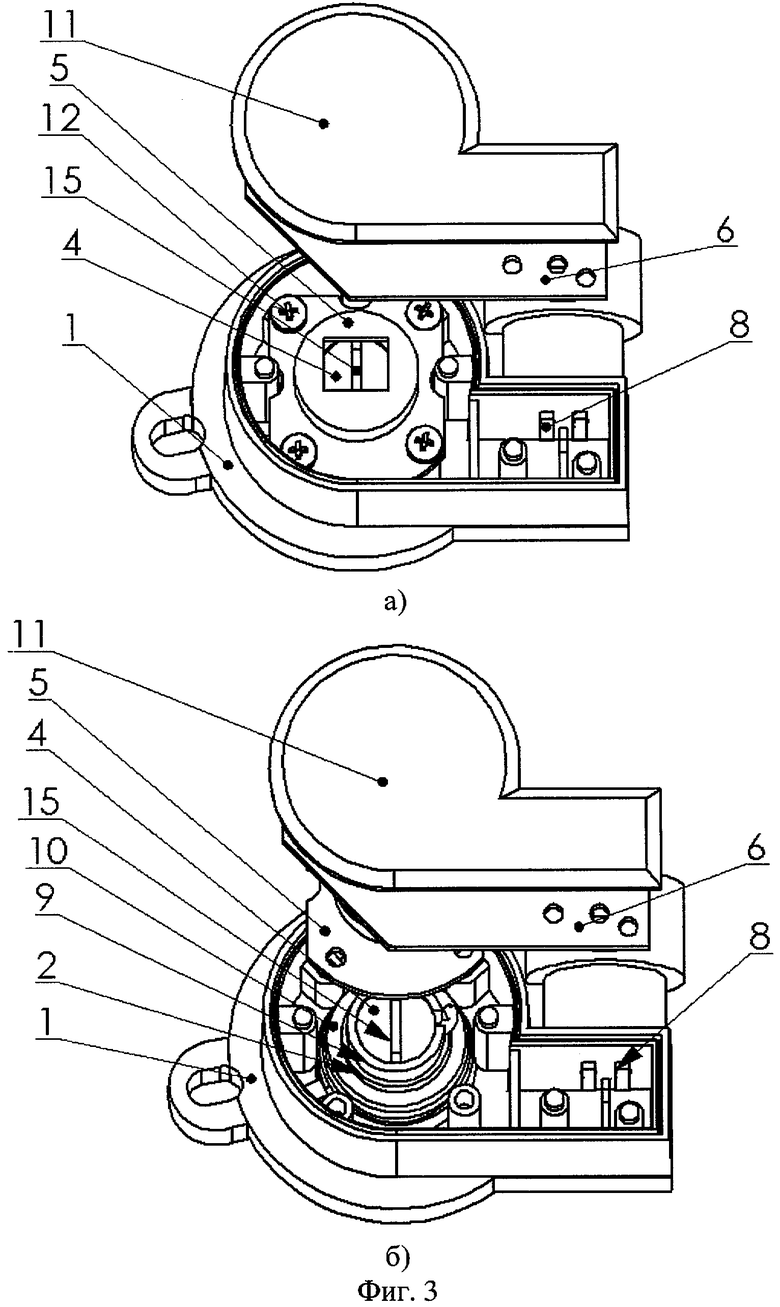
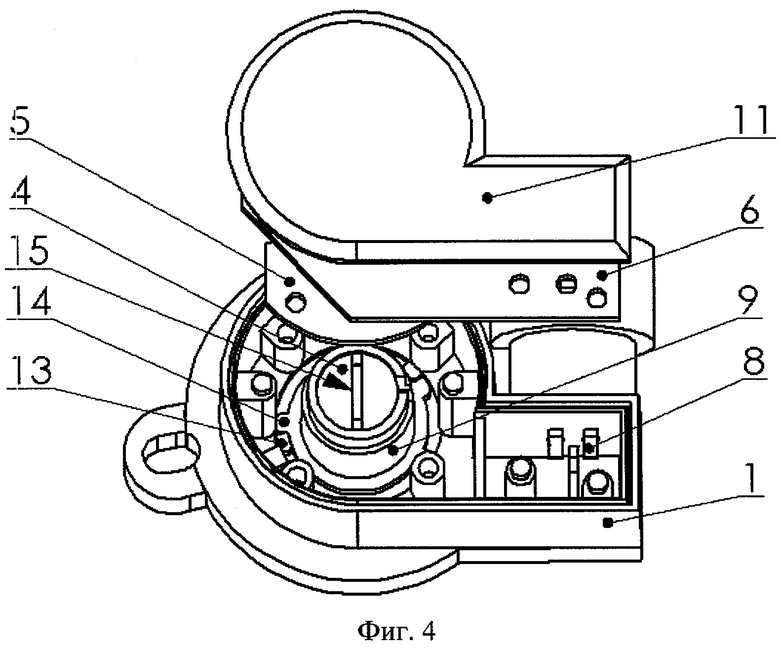
На фиг.1-4 показано основное исполнение устройства. На фиг.1 показаны проекционные виды и общий аксонометрический вид устройства, на фиг.2 показан вид в разрезе, иллюстрирующий принцип действия датчика, на фиг.3 показаны виды устройства с ограничителем осевых перемещений без верхней крышки, на фиг.4 показан вид устройства с механическими ограничителями диапазона измеряемого угла до 360°.
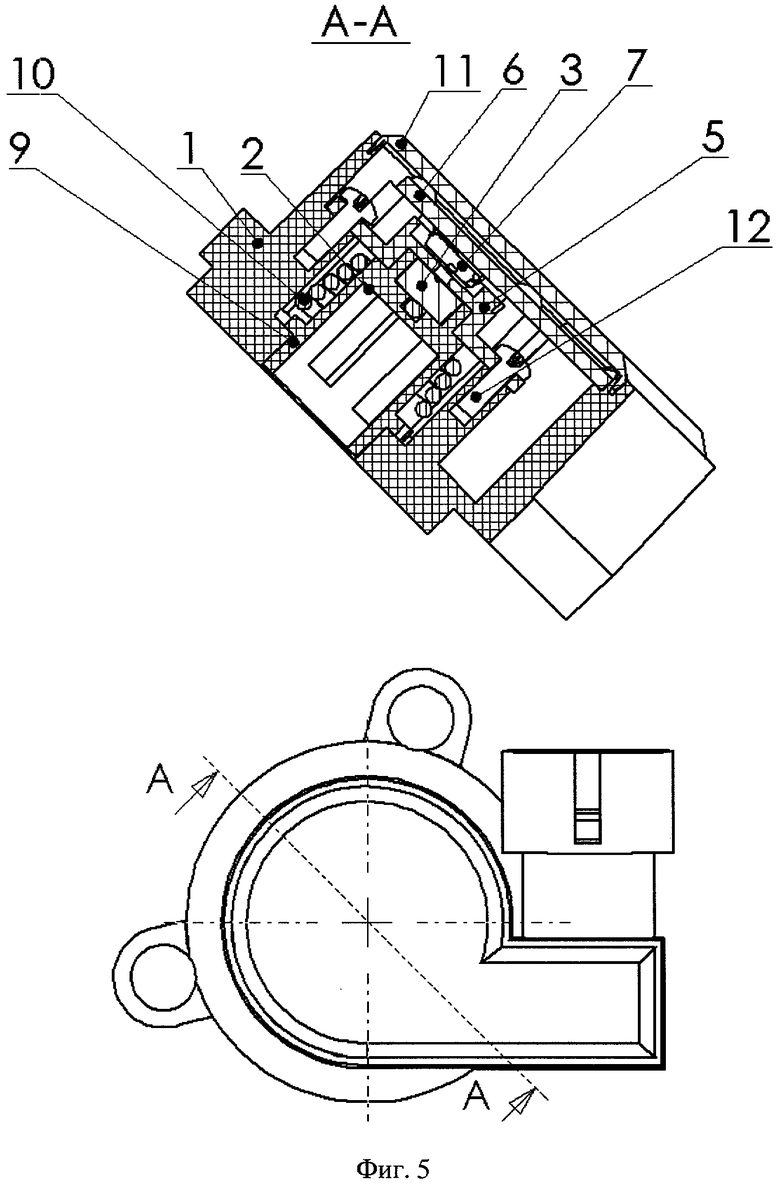
На фиг.5 показан вариант конструкции устройства для серийного производства без втулки, идентифицирующей положение полюсов магнита, полюса которого визуально различимы.
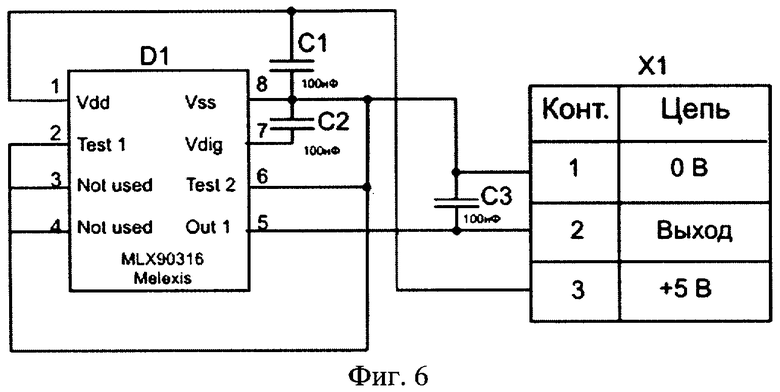
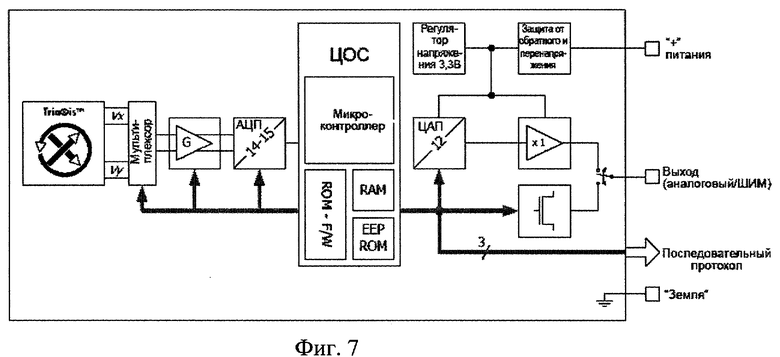
На фиг.6 приведен пример схемы электрической принципиальной заявляемого устройства с программируемой в EEPROM ИС двухосевого углового магнитного энкодера MLX90316 Melexis, на фиг.7 приведена функциональная схема ИС MLX90316.
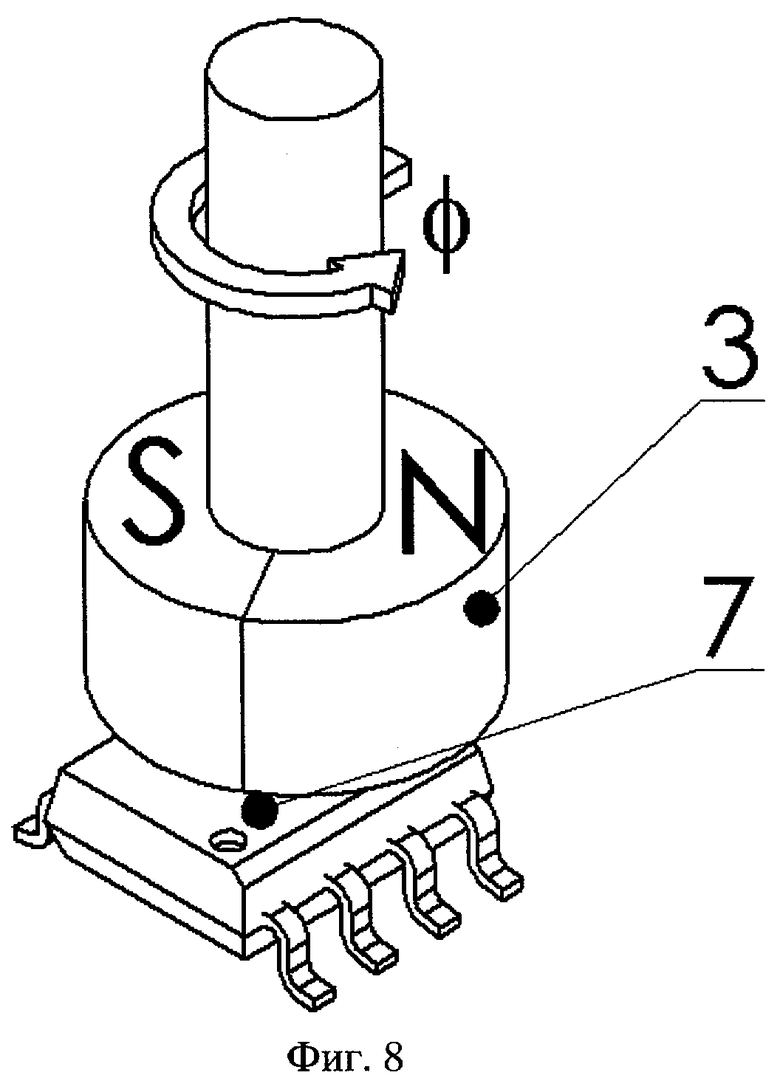
На фиг.8 показаны основные элементы магнитной системы и проиллюстрирован принцип действия заявляемого устройства.
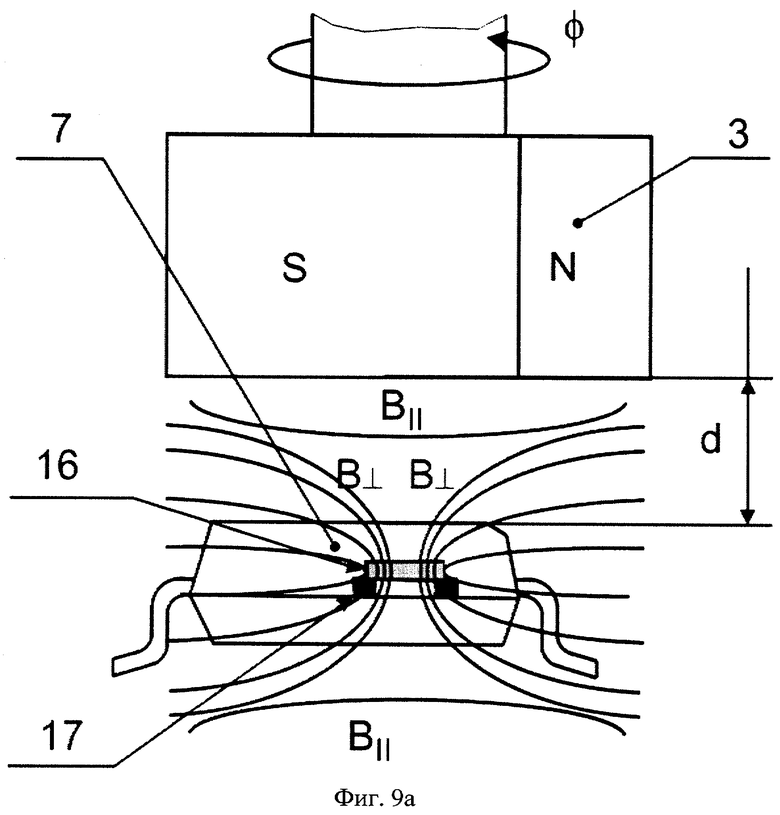
На фиг.9а-г подробно проиллюстрирован рабочий принцип датчика с массивом элементов Холла и ИМК, реализованный в технологии «Triaxis» Melexis:
на фиг.9а показано преобразование компонентов В|| параллельного рабочего магнитного поля в перпендикулярные B⊥ посредством ИМК-диска для считывания ноля пленарными элементами Холла;
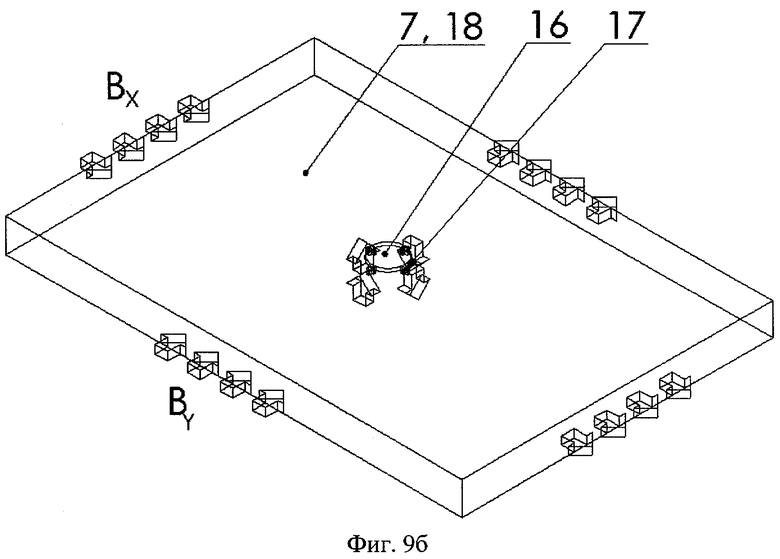
на фиг.9б показаны: расположение диска ИМК и массива элементов Холла на подложке в ИС и преобразование параллельных компонентов магнитного поля ВX и ВY в направлении измерительных осей Х и Y;
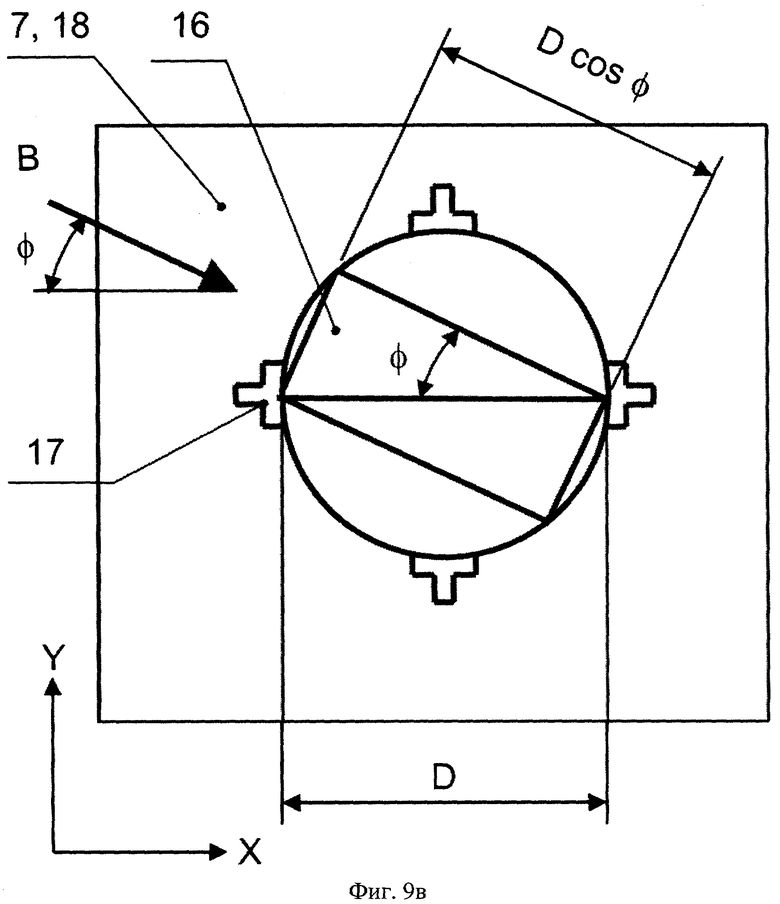
на фиг.9в показан принцип получения синусоидальных и косинусоидальных сигналов с массива элементов Холла для детектирования угла ϕ;
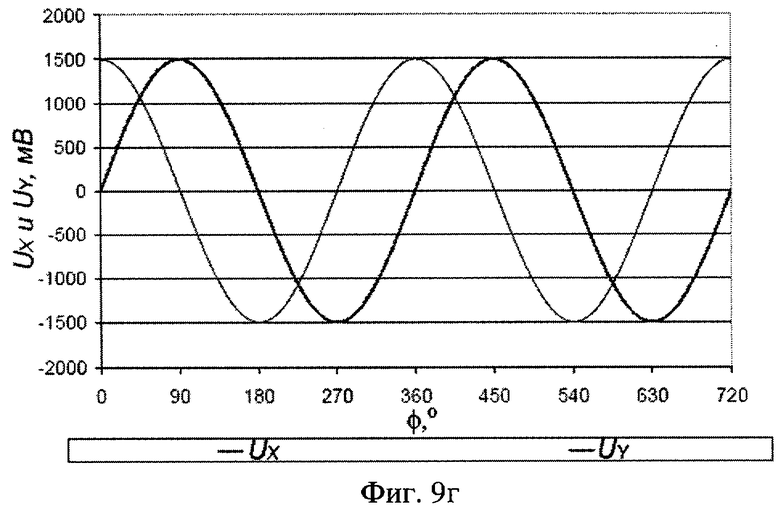
на фиг.9г показаны сформированные на первичном этапе сигналообразования в ИС MLX90316 синусно-косинусные сигналы напряжения.
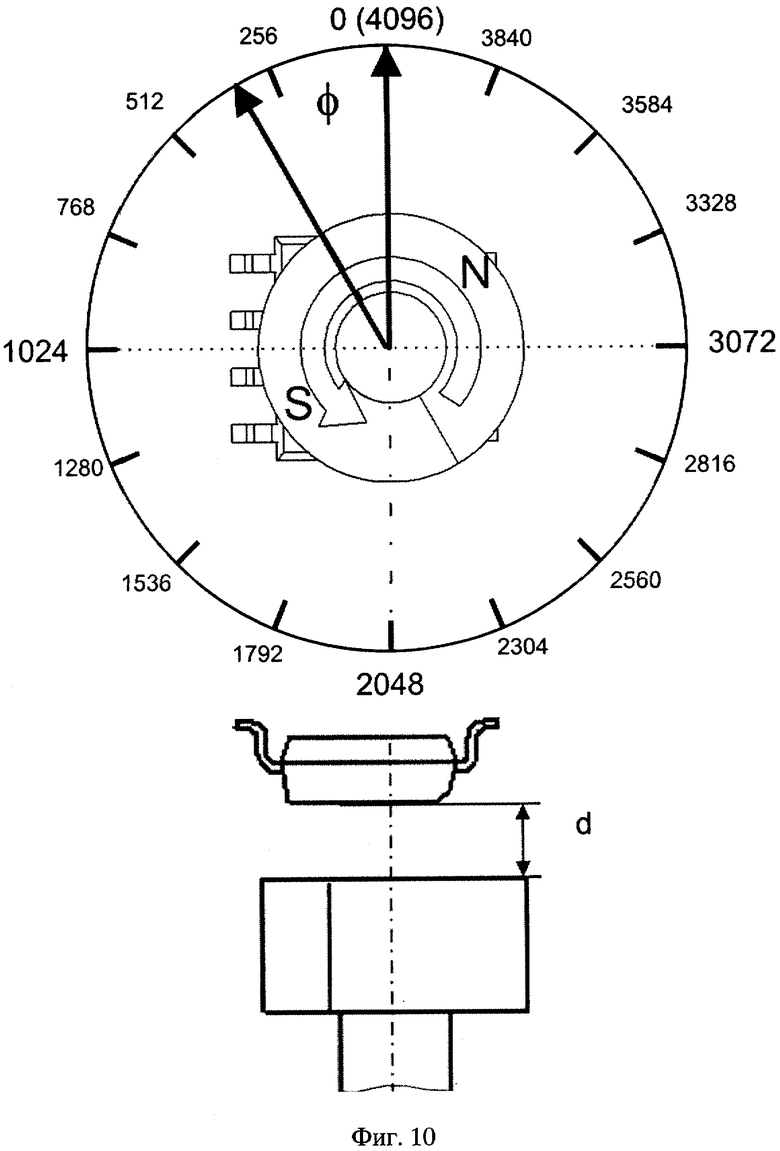
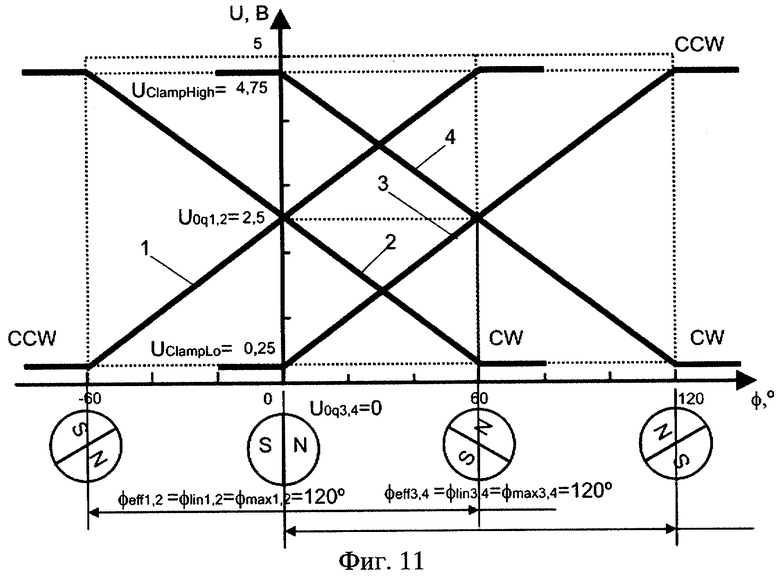
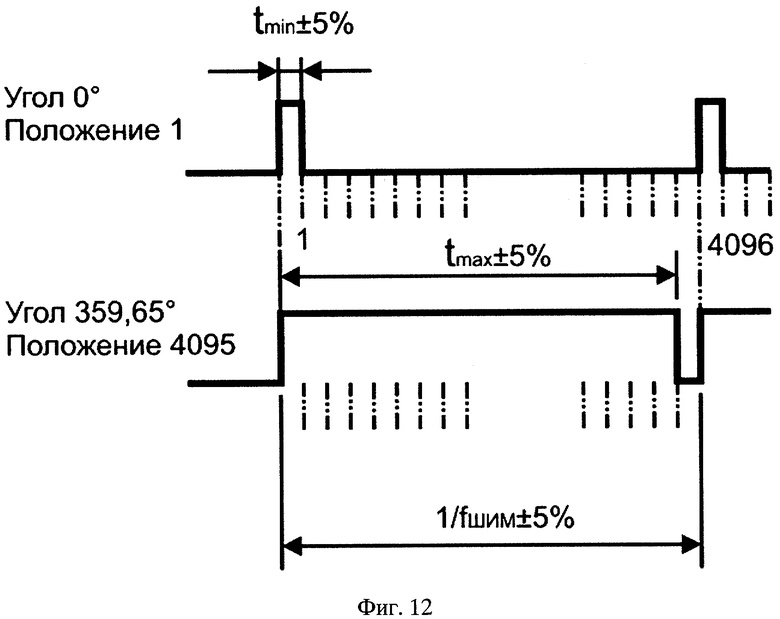
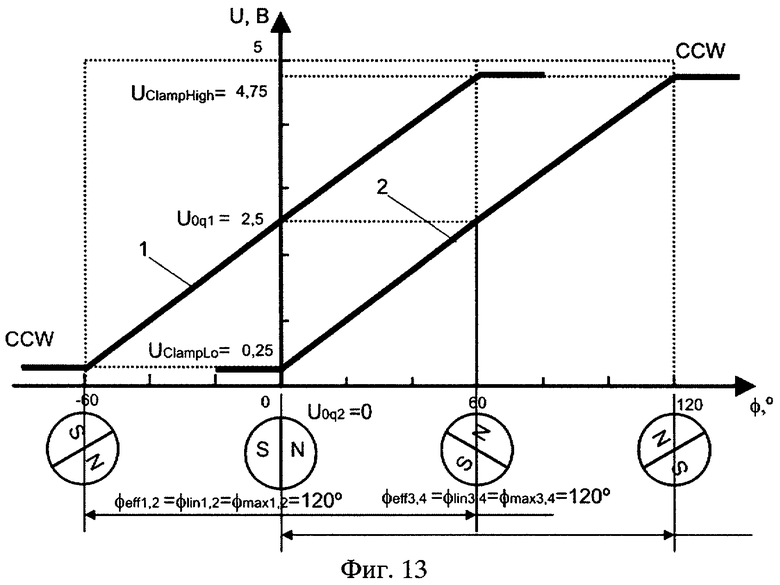
На фиг.10 дана иллюстрация рабочего принципа 12 - битного аналогового двухосевого магнитного углового энкодера (разрешение ЦАП аналогового выхода MLX90316-12 бит), на фиг.11 проиллюстрирован принцип вычисления угла MLX90316 в корпусе SOIC-8 и показаны примеры аналоговых выходных характеристик ИС, на фиг.12 показан выходной ШИМ - интерфейс MLX90316, на фиг.13 показаны примеры аналоговых выходных режимов заявляемого устройства, конструкция которого соответствует показанной на фиг.1-5, в ограниченном диапазоне угла ϕ.
На фиг.14-17 показаны: первичный этап формирования передаточной характеристики (фиг.14) и типичные программируемые выходные характеристики классического датчика Холла (фиг.15-17).
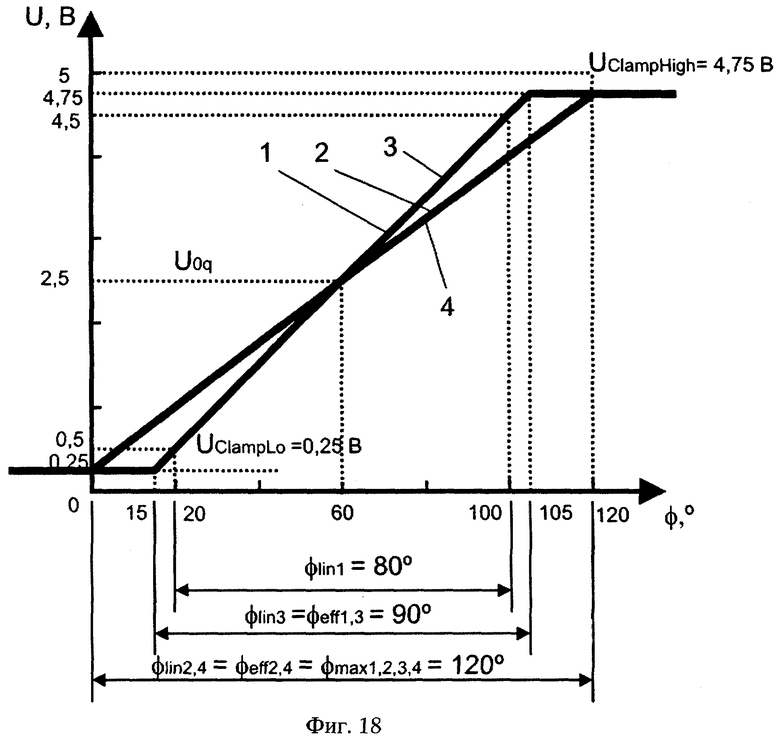
На фиг.18 показано сравнение аналоговых выходных режимов устройства с типичной характеристикой классического датчика Холла и типичными примерами характеристик ИС энкодеров (на примере однократно программируемой в памяти OTPROM ИС энкодера AS5043 Austriamicrosystems), на фиг.19 показано сравнение способов программирования аналоговых характеристик MLX90316 и AS5043:
на фиг.19а показано программирование нулевого положения (смещения) выходной характеристики AS5043;
на фиг.19б показана многоточечная калибровка выходной характеристики MLX90316.
В таблице приведены основные технические характеристики MLX90316.
Датчик положения дроссельной заслонки, конструкция которого показана на фиг.1-5. реализует рабочий режим устройства с вращением дипольного магнита в ограниченном угловом диапазоне механического угла ϕmax=120°. ИС датчика сканирует двумерное распределение магнитного поля с образованием аналогового сигнала (для совместимости с большинством существующих обрабатывающих блоков). Программно заданный эффективный электрический угол ϕeff и линейный участок ϕlin при этом составляет также 120° (может быть задан любой угол в диапазоне 0-360°), как показано на фиг.11 и 13.
Датчик положения дроссельной заслонки, показанный на фиг.1-5, состоит из: неподвижного корпуса 1, роторного узла 2, представляющего собой единую сборочную единицу или модуль ротора, включающего пружину кручения 10 и вращающуюся установочную втулку 9 с диаметрально намагниченным цилиндрическим постоянным магнитом 3, жестко установленным в роторный узел 2 и, как показано на фиг.1-4, запрессованным в пластмассовую регулировочную втулку - корпус 4, крышки 5 - ограничителя хода (осевых биений) роторного узла 2, закрепляемой на винтах 12, печатной платы 6, интегрального датчика - ИС Холла 7, контактов разъема 8. пружины кручения 10 в составе роторного узла 2, крышки датчика 11.
Основные элементы статора датчика включают корпус 1 и интегральный компонент датчика - ИС 7 (а также все остальные элементы, не входящие в состав ротора, относятся к статору), ротор (подвижная часть датчика) представляет собой роторный узел 2, выполняемый на основе деталей, жестко связанных между собой, - сборочный модуль, который состоит из установочной втулки 9, диаметрально намагниченного постоянного магнита 3, запрессованного во втулку 4, и пружины кручения 10.
Втулка 4 в конструкции роторного узла 2 может не использоваться, как показано на фиг.5.
В конструкции датчика положения дроссельной заслонки (фиг.1-5) роторный узел 2 механически связан с вращающимся валом детектируемого объекта (цели) и имеет возможность поворота на ограниченный угол ϕ, определенный поворотом вала объекта, в основании корпуса 1. С обратной стороны установочной втулки 9 в составе роторного узла 2 имеются ориентирующие пазы (или лыска) для установки устройства на вал с заданной начальной ориентацией. Корпус 1 жестко крепится двумя винтами к неподвижной части объекта.
Устройство имеет возможность обеспечивать основное вращение ротора относительно статора по часовой стрелке и возвратное движение против часовой стрелки. Цилиндрическая или коническая возвратная пружина кручения 10 служит для осуществления возвратного движения ротора и противодействия вращательному движению вала управляющего привода.
Корпус 1 выполняется в сборке с контактами разъема 8 (по технологии обливки или запрессовки). Интегральный датчик Холла - двухосевой магнитный угловой энкодер 7 устанавливается на плате 6 и запаивается. Плата 6 устанавливается в корпусе 1 поверх упорных штырей днища корпуса 1, верхняя часть которых оплавляется. Предпочтительное механическое расположение датчика 7 на плате 6 в корпусе 1 выбирается конструктивно. Контакты 8 запаиваются на плате 6.
Для механического ограничения осевых перемещений роторного узла 2 в корпусе 1 вводится крышка-ограничитель 5, фиксируемая в корпусе 1 поверх роторного узла 2 винтами 12. Максимальный угол ϕ, на который поворачивается вал объекта, механически ограничивается упорами 13 в основании корпуса и выступами 14 установочной втулки 9 роторного узла 2 (фиг.4).
Постоянный магнит 3 жестко устанавливается (запрессовывается и вклеивается) в роторном узле 2 по результатам его выравнивания, которое необходимо для получения идентичных технических характеристик партии изделий.
Нулевому магнитному вектору с нулевым значением магнитной индукции поля (или легкой оси намагниченности) может соответствовать любое механическое положение магнита 3 относительно корпуса 1, но при этом поворот нулевого вектора (или легкой оси намагниченности) магнита 3 при программировании передаточной характеристики должен быть согласован с измерительным принципом данной ИС, как показано на фиг.11 для аналоговых характеристик MLX90316.
При программировании задаются ограничивающие уровни напряжения UClampLo, UClampHigh, смещение U0q (напряжение при нулевой индукции поля), направление наклона (направление вращения магнита) и другие параметры выходной характеристики.
Для заявляемого устройства, принципиальная электрическая схема которого показана на фиг.6, ИС MLX90316 является первым коммерчески доступным продуктом. Измерительный принцип MLX90316 в корпусе SOIC-8 показан на фиг.8-11. При данном взаиморасположении магнитных полюсов магнита 3 и ИС 7 в конструкции, показанной на фиг.1-5, нулевому углу поворота магнита 3 относительно ИС 7 соответствует нулевое значение магнитной индукции поля.
С учетом этого взаиморасположения в конструкции датчика нулевой магнитный вектор, индицируемый пазом 15 втулки 4 (см. фиг.3 и 4), может совпадать или отличаться от нулевого вектора отсчета угла ϕ в корпусе 1 на постоянное угловое значение, которое в случае несовпадения целесообразно принимать равным ϕmax/2 (см. фиг.11 и 13). Вращение магнита 3 в данном примере конструкции фактически будет осуществляться против часовой стрелки относительно лицевой поверхности ИС, что задается программно.
Поскольку в серийном производстве желательно получение идентичных характеристик заявляемого устройства, с этой целью установку магнита 3 целесообразно производить по результатам его выравнивания в роторном узле 2, которое следует выполнять идентично для партии выпускаемых изделий.
Для установки магнита 3 может быть использована втулка 4, которая снабжается пазом 15 под отвертку для возможности предварительной ориентации нулевой плоскости симметрии или легкой оси намагниченности магнита 3 (фиг.3 и 4) перед его жесткой установкой (по результатам измерений магнитного поля, например, тесламетром, гауссметром, калиброванной линейной ИС Холла, или с применением специальных аппаратно - программных средств).
Кроме того, за счет применения втулки 4 обеспечивается:
1) возможность выравнивания нулевого положения магнита 3 в процессе сборки;
2) увеличение рабочей зоны выравнивания - начальных угловых допусков с малым магнитом 3 (позволяет увеличивать паз под отвертку в крышке-ограничителе 5);
3) допускается использование малых рабочих зазоров между магнитом 3 и ИС7.
Вместо ориентирующего паза 15 втулки 4 нулевая плоскость симметрии магнита 3 может быть также обозначена канавкой на поверхности магнита 3 или намечена краской. Для визуального различения полюсов магнит 3 также может быть покрыт краской двух цветов.
В серийном производстве, а также в том случае, когда применение втулки 4 уменьшает необходимый рабочий воздушный зазор, вариант с краской двух цветов предпочтителен.
Магнит 3 может совмещаться с установочной втулкой 9 роторного узла 2 (фиг.5). ограничитель хода 5 в этих случаях снабжается ориентирующим пазом для корректировки положения магнита 3 в процессе сборки.
Ограничитель хода 5 может быть также выполнен без паза, если установка (запрессовка) магнита 3 выполнена с необходимой точностью на предварительном этапе сборки. (Предварительная нежесткая установка магнита 3 может быть выполнена и во внутренней втулке ограничителя хода 5. Данная сборка тогда подклеивается со стороны магнита в роторном узле 2 и ограничитель хода 5 прикручивается винтами 12).
В заявляемом устройстве могут быть использованы любые из вышеперечисленных комбинации вариантов установки магнита. Во всех случаях выравнивание магнита 3 относительно ИС датчика 7 обеспечивается в процессе сборки заявляемого устройства. хотя и на разных этапах, по результатам выравнивания магнит 3 жестко устанавливается (заклеивается) в роторном узле 2 (также и в случае применения втулки - корпуса 4),
3 - контактный выходной разъем датчика углового положения с MLX90316. принципиальная электрическая схема которого показана на фиг.6, предназначен для формирования аналогового канала передачи данных, показанных на фиг.11, 13. Альтернативным вариантом является двухпроводной ШИМ-интерфейс, показанный на фиг.12.
В процессе программирования MLX90316 используются только функциональные выводы ИС 3 и контакты разъема 8. Никаких специальных проводных выводов, технологических перемычек и (или) разъемов для программирования устройства не требуется.
Программируемый магнитный угловой энкодер MLX90316, рекомендуемый для магнитной системы заявляемого датчика, функционирующего на основе рабочего принципа, показанного на фиг.8-11, - новейший и наиболее предпочтительный компонент элементной базы существующих на момент подачи данной заявки двухосевых магнитных угловых энкодеров, поддерживающих аналоговый или ШИМ-интерфейс.
MLX90316 - это гибридная ИС абсолютного магнитного углового энкодера в диапазоне 0...360° на базе технологии «Triaxis™» Melexis, сенсорная часть которого состоит из одного интегрированного магнитоконцентрирующего (ИМК) диска 16 диаметром D на КМОП - подложке 18 ИС 7 в корпусе SOIC-8 (или расположенных на двойной подложке двух ИМК в корпусе TSSOP16), и интегрированного крестообразного массива (массивов) взаимно ортогональных планарных элементов Холла 17, размещенных под ИМК 16, попарно чувствительных к направлениям Х и Y, соответственно, в плоскости, параллельной лицевой поверхности ИС 7 (фиг.9).
Применение ИМК обеспечивает преобразование компонентов В|| магнитного поля, параллельных поверхности ИС, в перпендикулярные B⊥ (фиг.9а-в). За счет данного преобразования достигается физическая чувствительность датчика именно к компонентам ВX и BY магнитного поля, параллельным поверхности ИС 7, которые при повороте магнитного вектора дипольного магнита 3 в описываемой магнитной системе без ИМК доминируют над перпендикулярными. MLX90316 с ИМК 16 и массивом планарных элементов Холла 17 производит электрическое отображение преобразованного ИМК 16 рабочего магнитного поля B⊥, перпендикулярного поверхности ИС 7, к которому чувствительны элементы Холла ИС 17.
Таким образом, повышение чувствительности датчика за счет эффектов концентрации компонентов магнитного поля именно в направлении измерительных осей датчика одновременно означает значительное увеличение чувствительности датчика к компонентам поля в вертикальной оси Z и увеличение сенсорного расстояния d (фиг.10).
Функциональная схема MLX90316 показана на фиг.7, технические характеристики отражены в таблице.
Кроме собственно сенсорной части этапы обработки сигнала в ИС включают: мультиплексирование (MUX), усиление, АЦП, ЦОС с микроконтроллером. RAM, ROM и EEPROM. Затем полученное цифровое значение угла переводится в аналоговый или ШИМ-сигнал.
Первая ступень схемы предназначена для кодировки сигналов механического угла в два дифференциальных сигнала с фазовой разницей 90° - синусный и косинусный (фиг.9г). Синусно-косинусные сигналы UX и UY, пропорциональные величине магнитного потока, обрабатываются в дифференциальной аналоговой цепи с применением классических техник отмены сдвигов («spinning» и «chopper» - стабилизированный усилитель, которые позволяют достигать значений смещения порядка нескольких мкТл), а затем оцифровываются АЦП с разрешением, конфигурируемым в 14 или 15 бит, и передаются в блок ЦОС.
Основным элементом блока ЦОС является 16-битный ШЗС-микроконтроллер. использующий цифровое представление сигналов для вычисления угла посредством табличной функции арктангенса, применяемой к соотношению сигналов UY/UX:
АЦП и блок ЦОС обеспечивают высокоточный расчет углового положения магнита относительно ИС (угла поворота магнитного вектора, параллельного поверхности ИС).
Функциональность ЦОС управляется специальным микрокодом микроконтроллера (firmware - F/W), хранимым в памяти ROM.
В дополнение к функции арктангенса "ATAN", микрокод F/W контролирует всю аналоговую цепь, выходную передаточную характеристику, выходной протокол, этапы калибровки, программирования и режимы самодиагностики.
Поскольку функция «ATAN» вычисляется из соотношения UY/UX (как при использовании магниторезистивных датчиков), угловая информация является независимой от вариаций плотности потока при изменении воздушного зазора d, магнитных неоднородностей, влияния температуры, несогласований двух квадратурных сигналов UY и UX. ИС Холла MLX90316 обладает способностью измерять углы 0...360°, в отличие от AMP - датчиков (0...180°) и классических датчиков Холла (0...120°), с высокой линейностью, независимо от взаимоположения ИС и полюсов магнита в конструкции.
В описываемой магнитной системе (фиг.8-10) ось вращения цилиндрического дипольного магнита 3 должна быть центрирована с массивом измерительных элементов 17, являясь точкой отсчета полярной системы координат для определения угла ϕ поворота легкой оси (фиг.10), но рассматриваемый измерительный принцип устойчив также к смещениям магнита 3 от его оптимального положения в плоскости измерительных осей X, Y.
Текущее цифровое значение угла, вычисленное в блоке ЦОС, затем может быть преобразовано 12-битным ЦАП в аналоговую форму (фиг.10, 11). Другие типы выходного формата, поддерживаемые ИС - 12-битный ШИМ (фиг.12) и последовательный выход (см. таблицу).
Как упоминалось выше, выходная передаточная характеристика датчика является полностью программируемой (смещение U0q (среднеквадратическое напряжение), усиление, ограничивающие уровни UClampLo, UClampHigh) непосредственно в рабочих условиях, причем, в отличие от однократно программируемых энкодеров Austriamicrosystems, программирование рабочих настроек и коэффициентов MLX90316 выполняется в перепрограммируемой энергонезависимой памяти EEPROM.
При программировании с помощью комплекта РТС-04 Melexis передаточных характеристик заявляемого датчика, соответствующих показанным на фиг.13 для примера конструкции, изображенной на фиг.1-5, устанавливаются следующие параметры:
- Выход (передаточная характеристика) - аналоговое напряжение U(ϕ).
- Нижний ограничивающий уровень ClampLo=0,25 В (UClampLo) для ϕ≤0°.
- Верхний ограничивающий уровень ClampHi=4,75B (UClampHigh) для ϕ≥120°.
- Смещение Voffset (U0q)=2,25 В.
- Направление вращения, в зависимости от расположения MLX90316 в конструкции - против часовой стрелки (CCW): CLOCKWISE=CCW=1 (в других конструкциях заявляемого устройства направление вращения может быть по часовой стрелке - CW (фиг.11)).
- Медленный (точный) скоростной режим работы ЦОС HIGHSPEED=0 (Slow Mode).
Как упоминалось выше, поскольку программирование ИС выполняется через функциональные выводы, в контактный интерфейс включаются только функциональные выводы датчика. Никаких выводов датчика, не используемых в дальнейшем после его программирования в перепрограммируемой памяти EEPROM, в заявляемой конструкции нет, что означает упрощение конструкции устройства и технологии его сборки и монтажа.
Альтернативная элементная база ИС для конструкций данного типа - магнитные угловые энкодеры с линейным аналоговым или ШИМ-выходом, рассчитанные на однократное программирование с использованием специальных выводов (AS5043 Austriamicrosystems, новая 12-битная ИС AS5045 с ШИМ-выходом) или программирование только в заводских условиях (ИС АМ512 RLS), а также энкодеры со специальным конфигурированием выходов (iC-MA iC-Haus).
Необходимо отметить, что MLX90316 позволяет получить именно аналоговую характеристику, например, для датчика положения дроссельной заслонки оптимальную с точки зрения унификации и совместимости с существующими автомобильными системами, которая может быть запрограммирована после сборки устройства в пределах всего механического углового диапазона ϕmax в пределах 0°≤ϕ≤120°, который будет являться одновременно и полным диапазоном ϕeff (ϕeff - эффективный электрический угол или полный диапазон), и функциональным линейным угловым диапазоном ϕlin.
Применение программируемой ИС двухосевого углового энкодера в комбинации с вращающимся постоянным магнитом, создающим рабочее поле, позволяет получать в диапазоне 0...360° четыре (по числу элементов Холла) или два аналоговых рабочих сигнала (фиг.9г), что эквивалентно применению четырех или, как минимум, двух аналоговых дискретных датчиков Холла классического типа в альтернативных конструкциях и означает упрощение конструкции, а также технологии сборки и монтажа.
За счет качества сборки и однородности магнитных поверхностей магнита достигается дальнейшее повышение точности и повторяемости измерений, повышение надежности.
Специальное внимание уделяется вопросу выбора магнитов: магниты должны быть цилиндрической формы, диаметрально намагниченные. В конструкции датчика, показанной на фиг.1-5, используется магнит ⊘6×3.
Магнитный материал может быть любого из следующих типов: AINiCo, SmCo5 или NdFeB. В автомобильных системах с повышенной рабочей температурой наиболее предпочтительным материалом является SmCo, имеющий лучшие свойства температурной стабильности.
Магнитное поле, перпендикулярное поверхности сенсорного массива, в радиусе порядка 1 мм должно составлять приблизительно ±50 мТл (см. табл.). В конструкции датчика могут быть использованы магниты и другой геометрии, но это может повлиять па величину расстояния d до ИС.
С магнитом ⊘6×3 рекомендуемое рабочее магнитное поле достигается на расстоянии 0,5...1,5 мм до поверхности ИС (плюс 0,46 мм до поверхности ИМК).
Максимальная плотность потока для ИС с ИМК не может превышать ±1 Тл (для MLX90316 рекомендуется ±700 мТл), так в сильных полях ИМК наводит значительную нелинейность.
В отличие от классических датчиков Холла, магниты, используемые в заявляемом устройстве, отличаются меньшими размерами и могут быть более слабыми; описываемый измерительный принцип обеспечивает улучшенную температурную точность, способность измерять углы 360° с высокой линейностью, независимой от взаимоположения ИС и полюсов магнита в конструкции.
Диаметрально намагниченный магнит цилиндрической формы для энкодеров Холла - значительно меньших размеров по сравнению с магнитами для AMP-датчиков. используемых ранее в аналогичной измерительной конфигурации при детектировании углов в диапазоне 0...180°.
Высокая чувствительность магнитных угловых энкодеров Холла, после усиления сравнимая с чувствительностью эффекта AMP (порядка 20 мВ/мТл), позволяет использовать рабочий воздушный зазор d во всех конфигурациях, достаточный для изоляции механической и электрической частей друг от друга.
В отличие от альтернативных устройств на основе AMP-эффекта, для которых необходим специальный обработчик мостовых сигналов, количество внешних дискретных компонентов в схеме датчика является минимальным.
Конструкция заявляемого датчика характеризуется простотой, технологичностью. надежностью, минимальным набором механических и электрических компонентов и максимальным набором адаптационных признаков к конкретным условиям работы.
Развитие адаптационных признаков достигается также за счет применения механических упоров-ограничителей измеряемого угла, жестко закрепленного в корпусе датчика ограничителя осевых перемещений роторного узла и возвратной пружины кручения.
Введение ограничителя осевых перемещений, кроме защиты ИС датчика от физического разрушения, позволяет регулировать (как правило, увеличивать) магнитную чувствительность датчика (крутизну рабочих магнитных сигналов), использовать меньшие рабочие зазоры d и более слабые магниты, или, напротив, большие зазоры с несколько более сильными магнитами, чем предусмотрено спецификацией ИС датчика (рабочее поле MLX90316 должно быть менее ±700 мТл).
Повышение чувствительности устройства означает также, что увеличивается амплитуда синусоидальных и косинусоидальных рабочих сигналов, которые в этом случае будут более помехоустойчивыми.
При малых рабочих зазорах ограничитель полностью исключает риск физического разрушения микросхемы вследствие осевых биений привода дроссельной заслонки. педали и т.д., и механической вибрации.
За счет введения ориентирующих пазов (лыски) в установочной втулке датчика и втулке - корпусе магнита для быстрой механической подгонки положения магнита отверткой, механических ограничителей осевых перемещений роторного узла с магнитом и измеряемого угла (упоров в корпусе датчика и выступов установочной втулки) обеспечивается технологичность конструкции. Лыска в установочной втулке датчика, паз под отвертку в корпусе или теле магнита или возможность визуального различения полюсов при покраске магнита обеспечивают идентичные технические характеристики серийно выпускаемых изделий.
В совокупности, за счет применения упоров корпуса статора (выступов ротора) на границах измеряемого угла, ограничителя и пружины, при использовании ориентирующих пазов достигается увеличение надежности, повышение точности измерений, повторяемости, технологичности.
Заявляемый датчик отражает, в первую очередь, введение в датчик углового положения на эффекте Холла, например датчик положения дроссельной заслонки, магнитной системы, описанной выше, на основе программируемой в EEPROM ИС с ИМК двухосевого магнитного углового энкодера с линейным аналоговым или ШИМ-выходом в диапазоне угла 0...360° и цилиндрического дипольного магнита, магнитный вектор которого при вращении параллелен лицевой поверхности ИС.
За счет возможностей интегрированной схемы обработки сигнала энкодера. программирования ИС с EEPROM в конкретных условиях работы, наличия готового аналогового или ШИМ-интерфейса и интегрированных схем защиты достигаются высокая точность датчика, адаптивность к конкретным условиям работы, минимальное число компонентов схемы и контактов датчика, высокая надежность.
Минимизация электронных компонентов достигается именно за счет применения ИС энкодера Холла с высокой степенью интеграции (минимальный набор внешних интерфейсных компонентов применяется только в случае отсутствия идентичных интегрированных средств).
Программирование после сборки всего устройства основных параметров его аналоговой или ШИМ выходной характеристики - ограничивающих уровней выходного напряжения и точек калибровки, направления вращения, смещения и усиления (чувствительности) и других параметров обеспечивает в конструкции произвольный или оптимальный (для серийного производства) выбор положения нулевой плоскости магнитной симметрии магнита относительно корпуса датчика и соответствующего данному положению детектируемого углового значения, что значительно повышает адаптивность и технологичность устройства.
На фиг.18 показано сравнение классической передаточной характеристики датчика Холла (подробнее функционирование классических датчиков Холла проиллюстрировано фиг.14-17), режимов альтернативного устройства на основе AS5043 и пример выходной характеристики заявляемого устройства. Фиг.18 иллюстрирует расширение максимального механического ϕmax, эффективного электрического ϕeff и линейного диапазонов ϕlin измеряемых углов ϕ в заявляемом датчике (1 - выходная характеристика классического датчика Холла; 2 - высоколинейный аналоговый режим заявляемого устройства; 3, 4 - диагностические аналоговые режимы устройства AS5043).
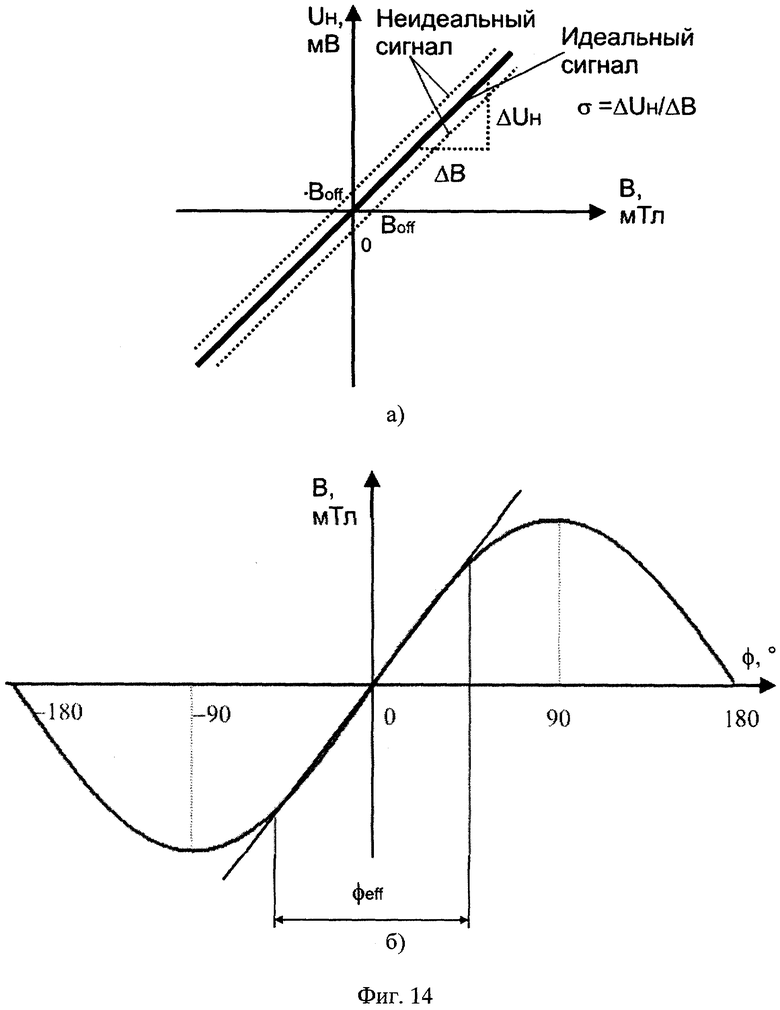
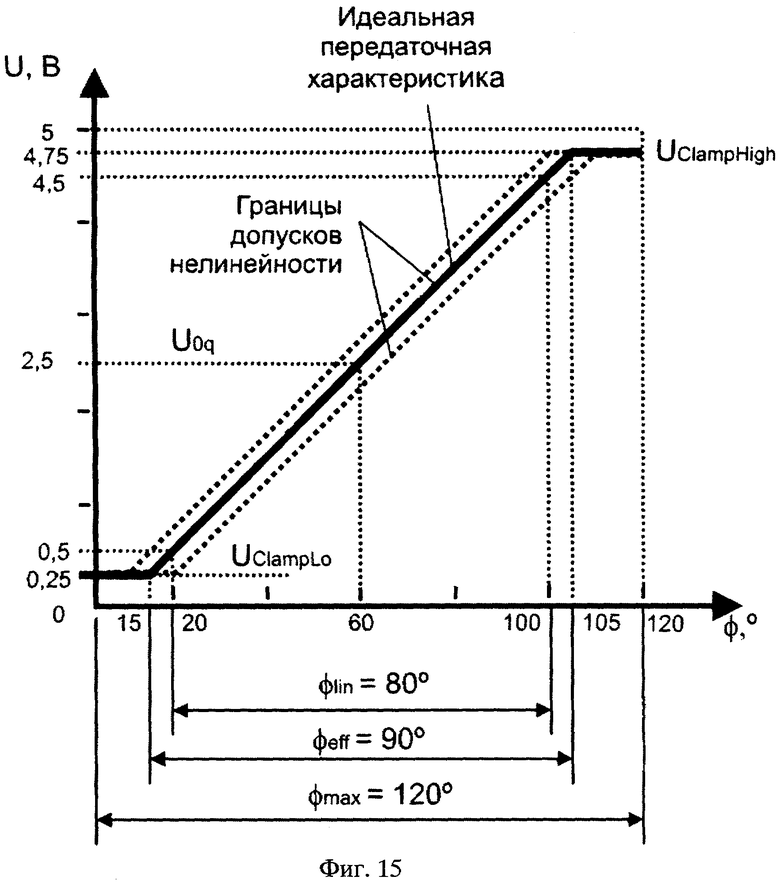
На фиг.14-18 показано, что классический датчик Холла позволяет обеспечить только очень малый полный диапазон ϕ (эффективный электрический угол ϕeff=90°, линейный диапазон ϕlin при этом не более 80°) вследствие того, что рабочее магнитное поле В (или сигнал напряжения Холла UH) при вращении магнита представляет собой синусоидальный сигнал В(ϕ), который линейно аппроксимируется в диапазоне эффективного электрического угла ϕeff, обычно не превышающем 100-120° (фиг.14б, фиг.15). Обычные датчики Холла в значительной степени подвержены влиянию магнитных неоднородностей и допусков невыравнивания, что означает присутствие некоторого ненулевого смещения Boff или (-Boff) чувствительного элемента Холла с чувствительностью σ (фиг.14а), а также влиянию температурных дрейфов смещения ±Вoff и чувствительности σ.
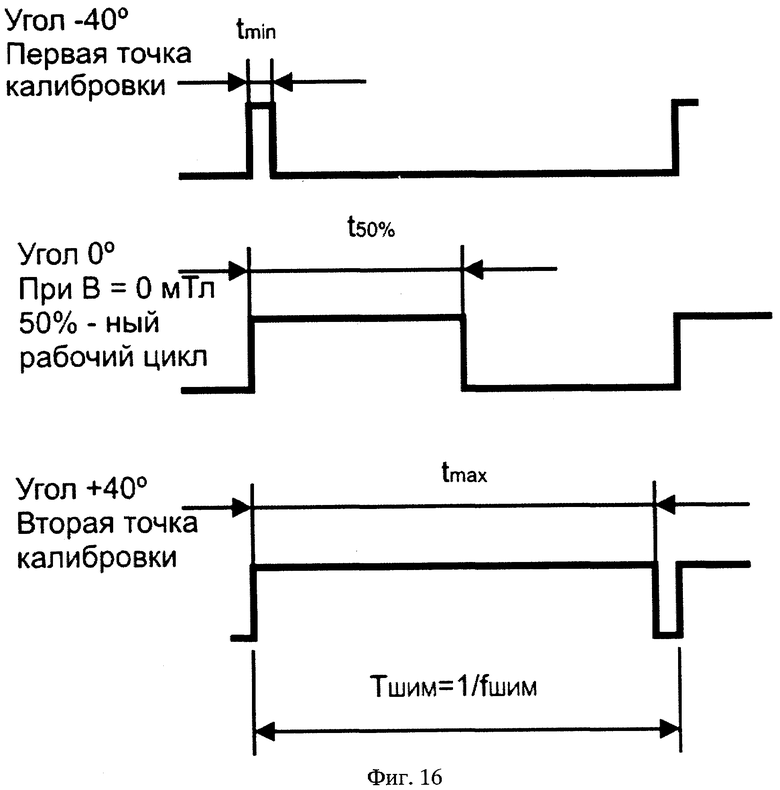
Стандартная аналоговая передаточная характеристика классического датчика Холла, программируемого в EEPROM по двум точкам калибровки на границах линейного диапазона, показана на фиг.15. На фиг.16 показано определение среднеквадратического 50%-ного рабочего цикла при нулевом значении магнитной индукции поля В и ШИМ выходы в точках калибровки для заявляемого устройства с ШИМ передаточной характеристикой.
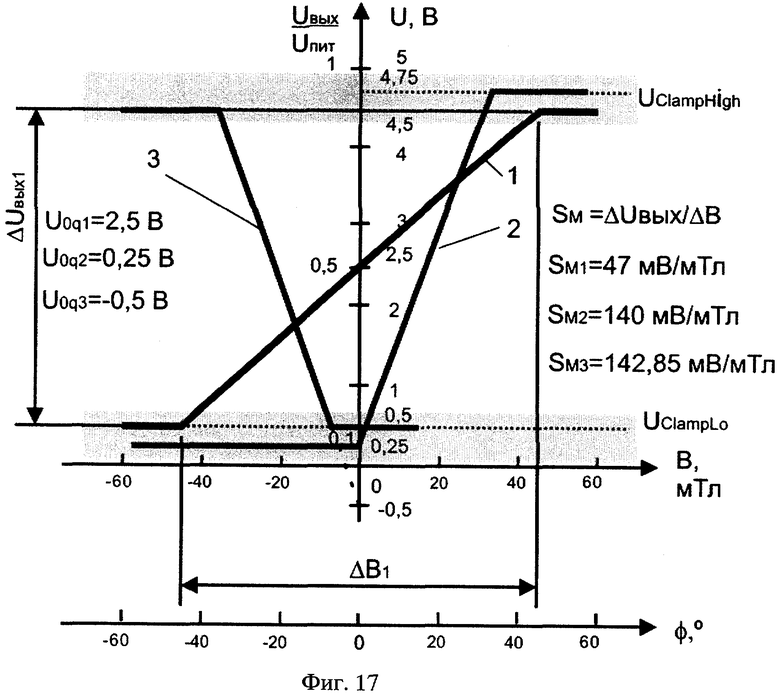
Программирование классического линейного датчика Холла с EEPROM по двум точкам калибровки позволяет получать в нормализованной шкале отсчета углового положения ϕ выходные характеристики U(ϕ), пропорциональные напряжению питания Uпит=5 В (фиг.17). В процессе программирования задается среднеквадратическое напряжение U0q и запасается расчетное значение магнитной чувствительности SM, например среднеквадратические напряжения U0q1, U0q2, U0q3 и чувствительности SM1, SМ2, SM3 сигналов 1, 2 и 3, показанных на фиг.17 (1 - биполярная характеристика (классическая); 2 - униполярная характеристика; 3 - инвертированная униполярная характеристика).
Программирование заявляемого устройства в EEPROM выполняется аналогично. но в линейном диапазоне ϕlin в пределах полного диапазона - эффективного электрического угла ϕlin=ϕeff=0...360°.
На примере характеристик датчика с AS5043 на фиг.18 и 19а показано, что детектируемый альтернативным устройством линейный диапазон может принимать значения в диапазоне 0...360°, программируемые при сборке, при выборе диапазона значений 360°/180°/90°/45°. В зависимости от фактического угла, запрограммированного в пределах 0...360° нулевого положения и нулевого смещения, передаточная характеристика AS5043 может электрически «вращаться» (см. фиг.19а).
В пределах запрограммированного углового диапазона в дальнейшем наклон характеристики AS5043 может регулироваться изменением усиления выходной усилительной ступени.
В отличие от вышеописанного альтернативного устройства, аналоговый режим заявляемого устройства с MLX90316 позволяет получить выходную характеристику именно в пределах функционального или полного механического диапазона детектируемого угла (фиг.19б), формируемую по двум или нескольким точкам калибровки.
MLX90316 поддерживает двухточечную или многоточечную калибровку передаточной характеристики (фиг.11-13, 18, 19б). Для большинства автомобильных датчиков осуществления только двухточечной калибровки вполне достаточно, но возможность точной коррекции сигнала, которая в ряде случаев также может быть использована, является преимуществом заявляемого датчика.
Таким образом, высокие показатели линейности выходного сигнала (<2%) и угловой точности (≤±0,5°) обеспечиваются в значительной степени за счет применения в устройстве на основе описанной магнитной системы высоких интегральных технологий: дифференциального принципа квадратичного массива элементов, методов устранения смещения, например «spinning current», «chopper - stabilization», вычислительных и интерфейсных возможностей энкодеров (заложенных в их теоретические принципы), программирования выходной характеристики в памяти EEPROM после полной сборки заявляемого устройства (с использованием только функциональных выводов).
В совокупности, повышение точности измерений, абсолютных и относительных показателей линейности, повторяемости, расширение функционального диапазона и линейного участка измеряемого угла до 360°, увеличение чувствительности, развитие адаптационных признаков к конкретным условиям работы, в том числе - для прямого замещения аналоговых трехпроводных и двухпроводных (ШИМ) потенциометров, повышение надежности, дальнейшее упрощение конструкции устройства и технологии его сборки и монтажа достигаются за счет применения в конструктивно оптимизированном для конкретных рабочих условий датчике магнитной системы с рабочим режимом, который реализует поворот направления магнитного вектора цилиндрического дипольного магнита в пределах детектируемого угла параллельно лицевой поверхности ИС двухосевого углового энкодера Холла с ИМК и адаптированной линейной аналоговой или ШИМ - передаточной характеристикой, программируемой после полной сборки устройства по двум или нескольким точкам калибровки в памяти EEPROM ИС с использованием только функциональных выводов заявляемого устройства.
Технические данные ИС Холла - двухосевого углового энкодера MLX90316
| название | год | авторы | номер документа |
|---|---|---|---|
| БЕСКОНТАКТНЫЙ ПРОГРАММИРУЕМЫЙ ДАТЧИК АБСОЛЮТНОГО УГЛОВОГО ПОЛОЖЕНИЯ В 360° | 2006 |
|
RU2312363C1 |
| БЕСКОНТАКТНЫЙ ДАТЧИК УГЛОВОГО ПОЛОЖЕНИЯ С ЛИНЕЙНЫМ УГЛОВЫМ ДИАПАЗОНОМ В ПРЕДЕЛАХ 360 ГРАДУСОВ | 2005 |
|
RU2313763C2 |
| БЕСКОНТАКТНЫЙ ДАТЧИК ПОЛОЖЕНИЯ ПЕДАЛИ | 2005 |
|
RU2301399C2 |
| Бесконтактный истинно двухосевой датчик угла поворота вала | 2014 |
|
RU2615612C2 |
| БЕСКОНТАКТНЫЙ ДАТЧИК ПОЛОЖЕНИЯ ДРОССЕЛЬНОЙ ЗАСЛОНКИ | 2005 |
|
RU2298148C2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ЛИНЕЙНОГО ИЛИ УГЛОВОГО ПЕРЕМЕЩЕНИЯ ОБОРУДОВАНИЯ ИЛИ МЕХАНИЗМА ГРУЗОПОДЪЕМНОЙ МАШИНЫ (ВАРИАНТЫ) | 2009 |
|
RU2403204C1 |
| БЕСКОНТАКТНЫЙ ДАТЧИК УГЛОВОГО ПОЛОЖЕНИЯ | 2010 |
|
RU2462724C2 |
| ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2008 |
|
RU2378618C2 |
| УНИВЕРСАЛЬНЫЙ ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2012 |
|
RU2494345C1 |
| Абсолютный датчик угла поворота | 2023 |
|
RU2820033C1 |

Изобретение относится к приборостроению и может быть использовано в электронных системах управления автомобилем для определения угла открытия дроссельной заслонки, степени нажатия педали акселератора, положения клапана рециркуляции отработавших газов и др. Сущность: статор датчика представляет собой программируемую в памяти EEPROM по двум или нескольким точкам калибровки интегральную схему (ИС) двухосевого углового энкодера, содержащего интегрированный крестообразный массив планарных элементов Холла с аналоговым выходом или ШИМ-интерфейсом, снабженную интегрированным магнитоконцентрирующим диском (дисками). Магнит ротора в процессе сборки по результатам выравнивания жестко установлен в роторном узле, содержащем установочную втулку из материала, не проводящего магнитное поле. Программирование формата, точек калибровки, смещения, направления вращения, чувствительности (усиления) аналоговой или ШИМ передаточной характеристики осуществляется после сборки устройства. Для программирования используются только функциональные выводы ИС. Технический результат: простота, технологичность, надежность, высокая точность в полном диапазоне углов ϕ=0...360°, адаптация к конкретным условиям работы. 4 з.п. ф-лы, 19 ил., 1 табл.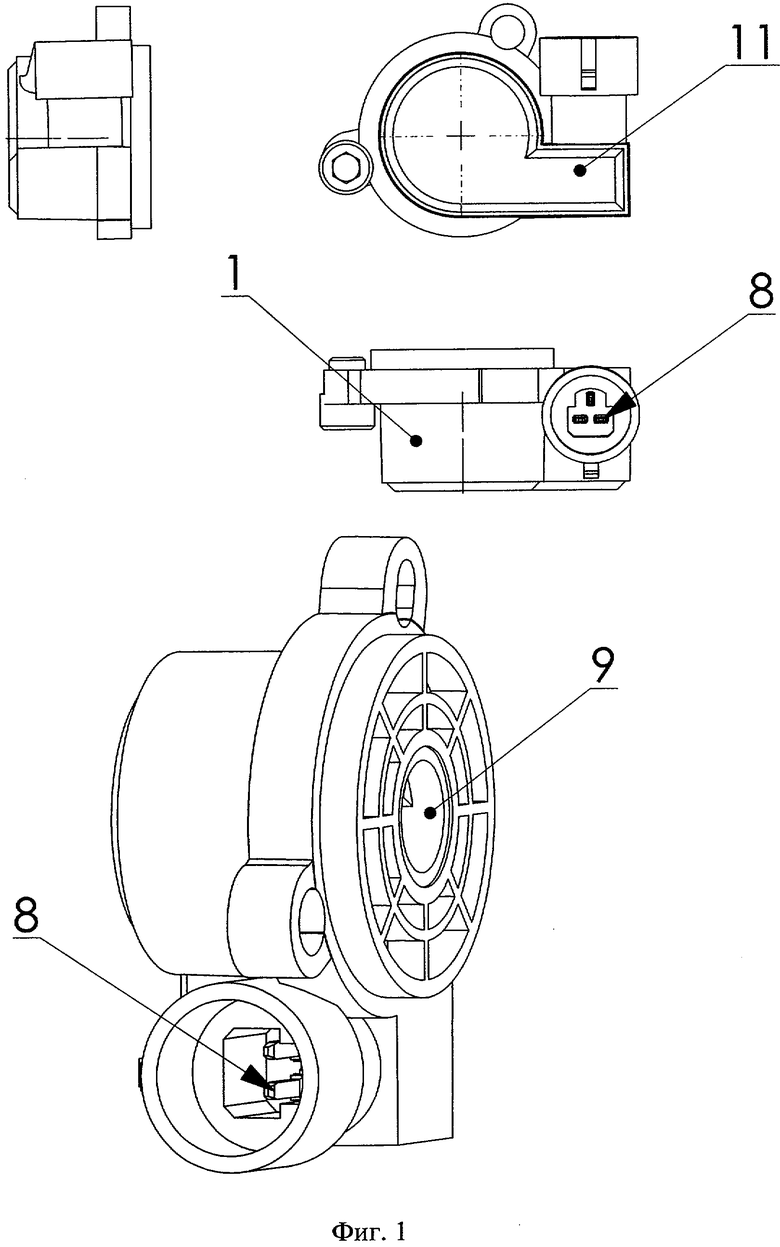
| ДАТЧИК ПОЛОЖЕНИЯ ЗУБА ЗУБЧАТОГО КОЛЕСА | 2001 |
|
RU2207575C2 |
| Преобразователь углового положения объекта | 1982 |
|
SU1067358A1 |
| ИЗМЕРИТЕЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ | 1998 |
|
RU2212087C2 |
| US 6577119 A, 10.06.2003 | |||
| US 6479987 В1, 12.11.2002 | |||
| US 6577119 А, 18.03.2003. | |||

