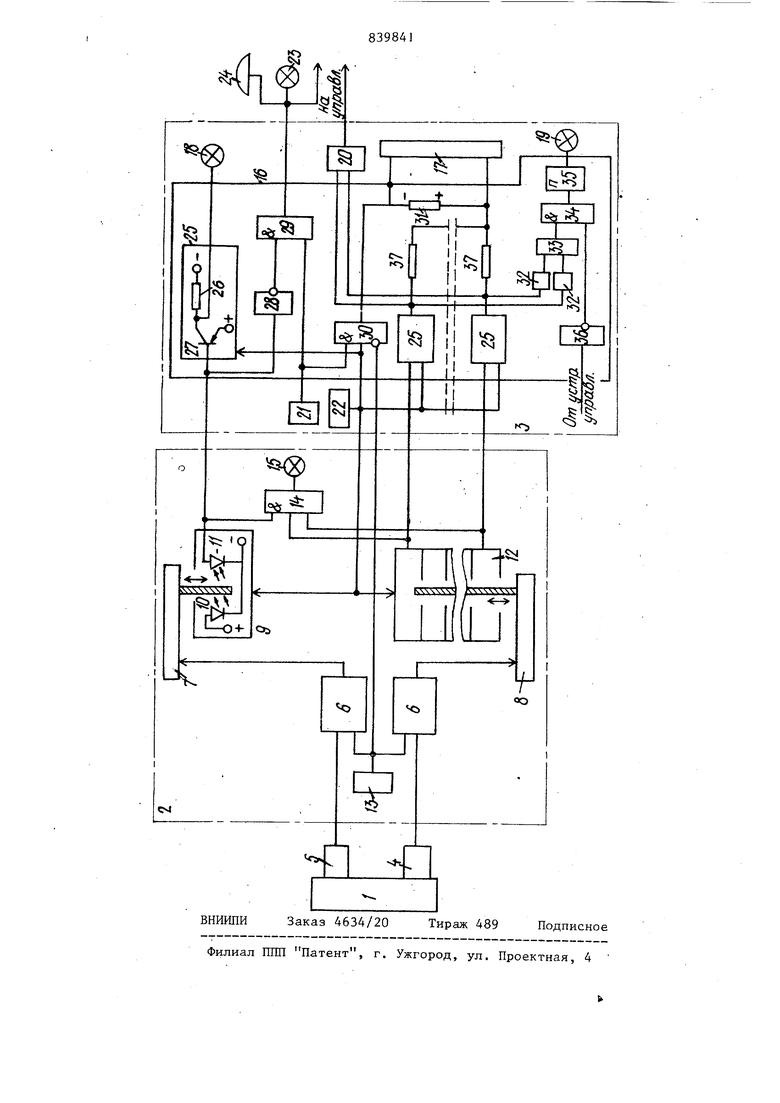
Изобретение относится к судостроению, в частности к устройству индикации положения запорных органов судовой системы. .Известно устройство индикации положения запорных органов судовой системы, содержащее индикатор, блок питания, аналоговый датчик и конечный выключатель, установленные на затворе, причем конечный выключатель связан с лампой сигнализации закрытого положения затвора, устройство управления и орган включения устройства индикации в работу 1. Недостатками этого устройства являются: 1.Устройство обеспечивает контро степени открытия затвора только из одного поста. 2.Оно не обеспечивает сигнализацию о самопроизвольном открытии затвора . 3.Отсутствует сигнализация оботходе затвора от фиксированного прО межуточного положения в любую сторону. . 4.ОтсутствуетКонтроль исправности устройства. 5.Необходимо обеспечивать герметизацию корпусов датчиков и формирование на выходе слабых сигналов для обеспе 1ения взрывобезопасности. Цель изобретения - расширение функциональных возможностей, повьшение безопасности и улучшение сохранности груза при одновременной перевозке различных сортов грузов, Укзанная цель достигается тем, что в него введен блок формирования сигналов, звонок и лампы сигнализации отхода и самопроизвольного открытия затвора, переключатель степени открытия затвора, прибор контроля, состоящий из чувствительных элементов, поворотных шкал с заслонками и бесконтактных датчиков перемещения, причем входы чувствительных элементов подключены к выходу конечного выключателя и аналогового датчика, а поворотные шкалы соединены кинематически с подвижными торцами чувствительных элементов и связаны через заслонки последовательно с бесконтактными датчиками, выходы котор подключены к выходам индикатора через блок формирования сигналов, дру гой вход которого подключен к органу включения устройства индикации, а выходы блока формирования сигналов параллельно связаны с лампами сигнализации закрытого положения затво ра и отхода затвора, с лампой сигнализации самопроизвольного открытия затвора, со звонком и с переключателем степени открытия затвора. Прибор контроля также снабжен кн кой контроля, элементом И и сигнальной лампой, которая через элемент И подключена к выходам бесконтактных датчиков, а кнопка контроля связана с чувствительными элементами и входо блока формирования сигналов. Кроме того в блок формирования сигналов введены логические элементы ИЛИ, НЕ И с запретом и ПАМЯТЬ дополнительные первый и второй элементы И и дифференцирующие цепочки, входные ячейки коммутации, выходы которых подключены параллельно киндикатору через делитель напряжения, общая точка которого связана с выходом элемента И с запретом, первый и второй входы которого подключены к органу включения устройства и блоку питания, а запрещающий вход связан с кнопкой ко троля, причем выходы ячеек коммутации дополнительно подключены к лампе сигнализации отхода затвора после довательно через дифференцирзпощие цепочки, первый дополнительный элемент И, элементы ИПИ и ПАМЯТЬ, причем второй вход первого дополнительного элемента И через элемент НЕ свя зан с устройством управления затвором, а вход одной ячейки коммутации подключен к звонку и сигнальной лампе сигнализации самопроизвольного от крытия затвора через элемент НЕ и второй дополнительный элемент И, вто рой вход которого связан с органом включения устройства индикации. На чертеже показана схема устройства. Устройство включает поворотный затвор 1, прибор 2 контроля и приборы, устанавливаемые обычно в центра14льном посту 3 управления, например, грузовыми операциями. На поворотном затворе 1 установлены аналоговый датчик 4 положения (с аналоговым выходом) и Конечный выключатель 5, который срабатывает, когда затвор находится в закрытом положении. Местный прибор 2 контроля содержит два чувствительных элемента 6. Подвижные торцы чувствительных элементов кинематически связаны с поворотными шкалами 7 и 8. Заслонка, установленная на шкале 7, входит во взаимодействие с бесконтактным датчиком 9 перемещения, в результате чего происходит преобразование перемещения шкалы в электрический сигнал. В качестве излучателя, например, может быть применен светодиод 10,а в качестве приемника фотодиод 11.Корпус подвижной шкалы 8 входит во взаимодействие с блоком 12 бесконтактных датчиков, построенным на тех же элементах. Оба чувствительных элемента 6 связаны с кнопкой 13 контроля кнопкой Контроль), а выходы бесконтактного датчика 9 и блока 1.2 датчиков через элемент И 14 с лампой 15, сигнализирующей об исправности прибора. В центральном посту 3 управления установлены следующие приборы: блок 16 формирования сигналов, который своими выходами связан с индикатором 17 степени открытия затвора, лампой 18 сигнализации закрытого положения затвора, лампой 19, сигнализирующей об отходе затвора и фиксированного промежуточного положения, переключателем.20 степени открытия затвора. Входы блока формирования сигналов подключены к органу включения устройства в работу переключателем 21 и блоку 22 питания, который связан также с входами датчика 9 и блока 12 датчиков. Вход и два .выхода приборов, расположенных в посту 3 управления, связаны с устройством управления затвором, а один выход подключен к лампе 23 и звонку 24, которые установлены в посту, где имеется постоянная вахта на ходу судна, например в ходовой рубке. Блок 16 формирования сигналов включает в себя входные ячейки 25 коммутации, питание к которым подается с блока 22, Каждая ячейка коммутации построена на сопротивлении 26 и транзисторе 27, Выход одной ячейки 25 связан с лампой 18 сигнализации, а вход - с датчиком 9, выход которого соединен с входом элемента НЕ 28. Выход элемента НЕ подключен к входу элемента И 29, выход которого подключен к лампе 23 сигнализации, звонку 24 и устройству управления, а второйвход элемента И 29 соединен с органом 21 включения. Выход органа 21 включения соединен также с элементом И с запретом 30, второй вход-соединен с блоком 22 питания, а запрещающий вход с кнопкой 13 контроля. Выход элемента 30 соединен с одним из входов индикатора 17 и сопротивлением 31, Остальные ячейки 25 коммутации своими первыми входами соединены с блоком 12 датчиков, а вторыми входами - с блоком 22 питания. Выходы этих ячеек 25 параллельно связаны с входами переключателя 20 и с лампой 9 последовательно через дифференцирующие цепочки 32, элементы ИЛИ 33, И 34 и ПАМЯТЬ 35. Второй вход элемента 34 соединен с устройством управления через элемент НЕ 36,Кроме того выходы ячеек 25 соединены через сопротивления 37 с вторым входом индикатора 17 и сопротивлением 31, которое с сопротивлением 37 образует делитель напряжения.
Устройство работает следующим образом.
При проведении грузовых операций на танкере оператор осуществляет контроль за положением большого числа поворотных затворов 1 (более 100 шт),
Для осуществления контроля оператор предварительно включает устройство в работу воздействием на переключатель 21. При открытии затвора 1 сигнал, который воспринимался чувствительным элементом 6 местного прибора 2, с выхода конечного выключателя 5, снимается, и поворачивается связанная с ним шкала 7, на которой становится видна надпись Открыт вместо надписи Закрыт, Рабочей средой конечного выключателя, аналогового датчика и чувствительных элементов может быть масло или воздух. При своем повороте шкала 7 входит между фотодиодом 1I и светодиодом 10 бесконтактното датчика 9, прерывая световой поток от излучателя к приемнику. Ток через
398416
фотодиод I1, который держал открытым транзистор 27 ячейки 25, прекращается. Транзистор 27 запирается,, и ток через нагрузочное сопротивление 26 прекращается, лампа 18 - гаснет.
Одновременно начинает поворачиваться шкала 8, которая отградуирована в процентах открытия затвора.
10 Шкала 8 приводится во вращение вторым чувтствительным элементом 6, который подключен к аналоговому датчику 4. Поворачиваясь вокруг оси. шкала 8 начинает взаимодействовать с блоком 12 датчиков, выходы которых соединены со входами ячеек 25 коммутации блока 16 формирования сигналов. По мере движения затвора перемещается шкала 8, срабатывают после2Q довательно ячейки25, и напряжение на сопротивлении 31 увеличивается пропорционально количеству подключенных к выходам ячеек 25 коммутации сопротивлений 37, которые образуют
25 с сопротивлением 31 делитель 38 напряжения. Питание делителя 38 напряжения осуществляется от блока 22 через элемент И с запретом 30, ко. торый срабатывает при включенном пе-JQ реключателе 21 и отсутствии сигнала с кнопки 13 Контроль, Меняющееся напряжение с сопротивления 31 подается на индикатор 17, засвечивая
его шкалу пропорционально степени
3J открытия затвора.
Если затвор 1 по условиям проведения грузовых операций необходимо автоматически остановить в любом промежуточном положении, то переклю Р чатель 20 степени открытия затвора из нулевого положения переводится в позицию, которая соответствует необходимой степени открытия. В этом случае выход необходимой ячейки 25 мутации блока 16 формирования сигналов через переключатель 20 соединяется с устройством управления для остановки затвора. Так как процесс проведения грузовых операций обычно
длится более суток, а количество затворов, участвующих в процессе, велико оператору трудно уследить за тем моментом, когда затвор может самопроизвольно отойти от положения,
JJ в котором его- оставил оператор в связи с технической необходимостью.
Для обеспечения оператора необходимой информацией в этом случае в блок 16 формирования сигналов введены логические элементы ИЛИ 33, И 34, ПАМЯТЬ 35,НЕ 36, и дифференцирующие цепочки 32. Есди затвор, остановленный в любом промежуточном положении, начинает самопроизвольное движение, на выходе соседней яч йки 25 блока 16 формирования сигналов появляется сигнал, который поступает на соответствующую дифференцирующую цепочку 32 и через элемент ИЛИ 33 на элемент И 34, эле мент ПАМЯТЬ 35 и лампу 19, сигнализирующую об отходе затвора от фик сированного промежуточного положе ния в случае, если на втором входе элемента И 34 имеется сигнал, который приходит с устройства управления затвором через элемент НЕ 35. Перед проведением грузовых операций и в процессе их реализации оператор может осуществить контроль ис правности устройства. Для этого он должен воздействовать на орган 13 управления, который входит во взаимодействие .с чувствительными элементами 6. По движению шкал 7 и 8 местного прирора 2, а также по засветке лампы 15, на которую подаются сигналы с выходов датчика 9 и блока 12 датчиков через элемент И 14, оператор может судить об исправ ности устройства. Грузобалластные си темы в момент перехода судна находятся в выключенном состоянии, а вс затворы 1 - в закрытом положении. В этот период пост 3 управления грузо выми операциями обычно зак1Я 1т, а оператор выполняет другие функции на судне. Однако в практике эксплуатации судов часто встречаются случаи самопроизвольного открытия затворов в момент перехода судна. Ос ществлять контроль за закрытым положением затворов особенно важно в случае перевозки судном различных сортов груза одновременно. Для обес печения защиты от смешения грузов в случае самопроизвольного открытия затвораВ блоке 16 формирования сиг . налов предусмотрены элементы НЕ 28. и И 29. Сигнал, поступающий на вход ячейки 25 коммутации с выхода датчи ка 9, поступает одновременно на вхо элемента НЕ 28 и, через элемент И .29, второй вход которого подключен к выходу переключателя 21, - на лам пу 23 сигнализации, звонок 24, которые в зависимости от организации службы на судне, могут быть установлены в ходовой рубке илицентральном посту, где имеется постоянная вахта на ходу судна. Кроме того, с выхода элемента И 29 сигнал поступает на закрытие затвора. Совокупность существенных признаков устройства позволяет достичь следующего полозкительного эффекта: а) в результате расширеяия.функциональных возможностей устройства достигается более качественный контроль за положением поворотных затворов, участвующих в процессе проведения грузовых операций, а сигнализация об от5(;оде затвора от промежуточного фиксированного положения позволяет вовремя обнаружить и ликвидировать снижение производительнести грузовых операций; б) формирование сигнала о самопроизвольном открытии затвора во время перехода судна обеспечивает защиту от смешения и порчи различных перевозимых грузов,в) обеспечение контроля устройства позволяет повысить эксплуатационные характеристики. Создание устройства индикации по.ложения арматуры судовых систем позволит внедрить на суда современные автоматизированные системы грузовых операций. Формула изобретения 1. Устройство индикации положения запорных органов судовой системы, содержащее индикатор, блок питания, аналоговый датчик и конечный .выклюпричем конечный выключатель связан с лампой сигнализации закрытого положения затвора, устройство управления затвором и орган включения устройства индикации в.работу, отличающееся тем, что, с целью расширения функциональных возможностей, повьшения безопасности и улучшения сохранности груза при одновременной перевозке различных сортов грузов, в него введен блок формирования сигналов, звонок и лампы сигнализации отхода и самопроизвольного открытия затвора, переключатель степени открытия затвора, прибор контроля, состоящий из чувствительных элементов
поворотных шкал с заслонками и бесконтактных датчиков перемещения, причем входы чувствител-ьных элементов подключены к выходу конечного выключателя и аналогового датчика, а поворотные шкалы соединены кинематически с подвижными торцами чувствительных элементов и связаны через заслонки последовательно с бесконтактньми датчиками, выходы которых подключены к выходам индикатора через блок формирования сигналов, другой вход которого подключен к органу включения устройства индикации, а выходы блока формирования сигналов параллельно связаны с лампами сиг. нализации закрытого положения затвора и отхода затвора, с лампой сигнализации самопроизвольного открытия затвора, со звонком и с переключателем ст.еПени открытия затвора.
2.Устройство по п, 1, о т л и чающе. еся тем, что прибор контроля снабжен кнопкой- контроля, элементом И и сигнальной лампой, которая через элемент И подключена к выходам бесконтактных датчиков, а кнопка контроля связана с чувствительными элементами и входом блока формирования сигналов,
3.Устройство по пп, 1 и 2, о т личающееся тем, что в блок (формирования сигналов введены логи3984110
ческие элементы ИЛИ, НЕ, И с запретом и ПАМЯТЬ, дифференцирующие цепочки, дополнительные первьй и второй элементы И и входные ячейки комJ мутации, выходы которых подключены параллельно к индикатору через делитель напряжения, общая точка которого связана с выходом элемента И с запретом, первый и второй входы которого подключены к .органу включения устройства индикации и блоку питания, а запрещающий вход связан с кнопкой контроля, причем выходы ячеек коммутации дополнительно подклюХ5 чены к лампе сигнализации отхода затвора последовательно через дифференцирующие цепочки, дополнительный первый элемент И, элементы ИЛИ и ПАМЯТЬ, причем второй вход дополнительного
20 первого элемента И через элемент НЕ связан с устройством управления затвором, а вход одной ячейки коммутации подключен к звонку и сигнальной лампе сигнализации самопроизвольного открытия затвора через элемент НЕ и второй дополнительный элемент И, второй вход которого связан с органом включения устройства индикации.
30 Источники информации,
принятые во внимание при экспертизе
1. Патент Японии № 52-24759, кл. 84 О 24, опублик. 1978.

| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления грузовыми операциями на танкере | 1979 |
|
SU919933A2 |
| Система погрузки-выгрузки жидких грузов на судне | 1981 |
|
SU1064583A1 |
| Устройство для контроля состояний объекта | 1981 |
|
SU966714A1 |
| Система управления грузовыми операциями на танкере | 1974 |
|
SU596498A1 |
| Устройство для передачи и приема сигналов | 1975 |
|
SU551686A1 |
| Устройство для приема телесигналов | 1983 |
|
SU1137497A1 |
| ПРИБОР КОНТРОЛЯ ЗНАНИЙ | 1994 |
|
RU2110096C1 |
| Устройство для контроля состояния судовых технических средств | 1979 |
|
SU783801A1 |
| Устройство охранно-пожарной сигнализации для системы центра лизованного наблюдения | 1979 |
|
SU773665A1 |
| Устройство для сигнализации с индикацией местоположения аварийного объекта | 1982 |
|
SU1121689A1 |