(54) СИСТЕМА УПРАВЛЕНИЯ ГРУЗОВЫ14И ОПЕРАЦИЯМИ
1
Изобретение относится к автоматизации специальных грузовых систем на танкерах.
По основному авт.св. № 753709 известна система управления грузовыми операциями на танкере, содержащая датчик уровня и датчики режимов оборотов iiacocoB/ связанные через устройство ввода и вывода информации с формирователем состояния объектов датчики посадки танкера, связанные с формирователем критических параметров, к одним из выводов которого подключены блоки контроля посадки и прочности, сигнальные табло, исполнительные механизмы насосов, блок коммутации управляющих команд и блок опроса, состоящий из регистров параметров по приоритету, матричных ячеек управления ими, матричных ячеек формирования управляющих команд, при этом входы блока опроса соединены с одним из выходов формирователей состояния объекта и критических параметров, а выход с одним из входов блока коммутации управляющих команд, другие входы которого соединены соответственно с выходами устройства ввода и вывода информации и формирователя состояния объекНА ТАНКЕРЕ
та, а выходы -с исполнительными механизмами насосов, затворов, блоком имитации грузовых программ и сигнальными табло. Матричные ячейки управления регистрами параметров по приоритету выполнены на элементах И, ИЛИ, Задержка, И-НЕ, блок коммутации управляющих команд состоит из переключателя и логичес10ких элементов И, ИЛИ, НК, Задержка , а блок имитации грузовых программ включает в себя временной датчик, имитаторы датчиков и элемент И 1 .
15
Недостатком изв.естной системыявляется то, что она обеспечивает оператора информацией по прочности, посадке и остойчивости судна только при достижении текущим значением
20 параметра граничного значения. После получения этой информации оператору необходимо по выработанной системой рекомендации произвести управляющее воздействие. После срабаты25вания исполнительного механизма начинается процесс ликвидации выбега параметра за допустимое граничное значение. За это время параметр может значительно превзойти допусти30мое значение. В момент проведения
грузовых операций такой заброс параметра, особенно прочности или остойчивости, за допустимую границу отрицательно влияет на техничес- кое состояние судна и может привести к аварийной ситуации. В момент расчета плана проведения грузовых операцийв случае достижения параметром граничного значения оператору необходимо начинать расчет снова Отсутствие возможности оперативной корректировки плана грузовых программ до момента выбега параметра увеличивает и время режима Проверка.
Целью изобретения является повышение быстродействия системы.
Цель достигается тем, что система снабжена блоком прогнозирования параметров судна при погрузке, состоящим из я.чейки синхронизации и подключенных к ее выходу одними . -i своими входами триггеров, одни и другие выходы которых.подключены соответственно ячейку предва- .. рения и непосредственно к одному из входов блоков формирования критических параметров, а другие входы одного и другого триггеров соответственно подключены к датчикам посадки непосредственно и через элемент ИЛИ к датчикам уровня и имитатору датчиков .
. На фиг.1 представлена функциональная схема всей системы управления; на фиг.2 - функциональная схема блока опроса; на фиг.З - функциональная схема блоков коммутации управляющих команд, имитации грузовых программ и прогнозирования параметров судна .соответственно. .
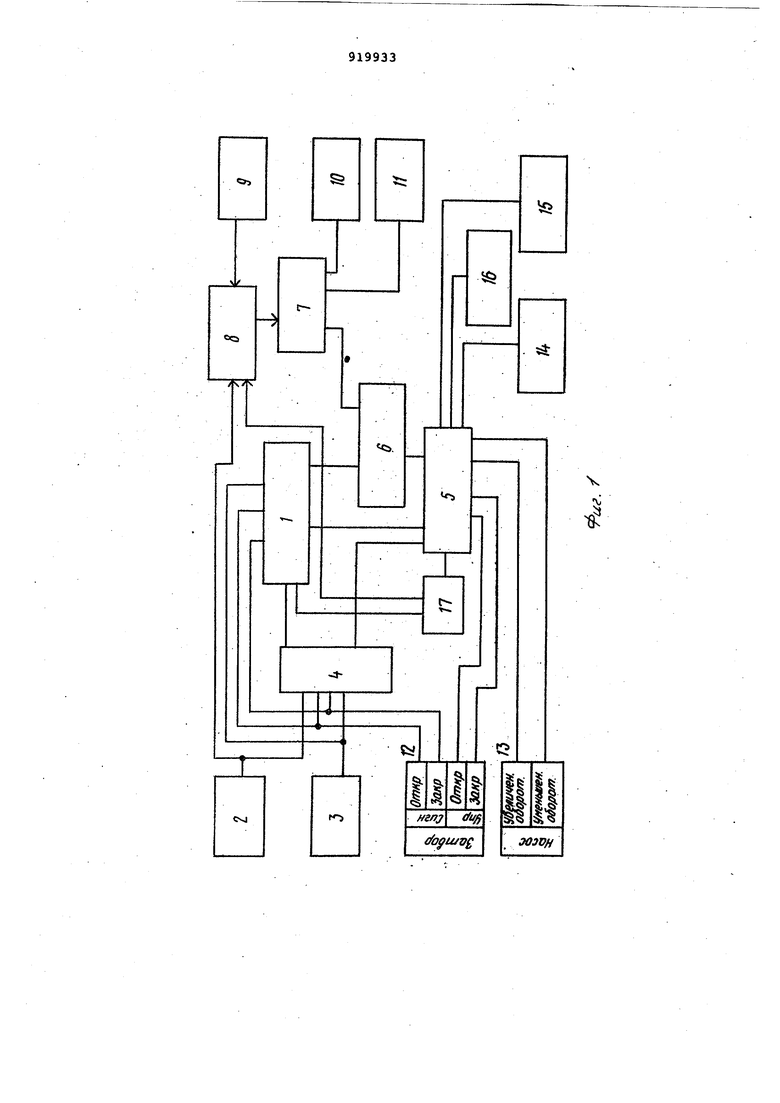
Система (фиг.1) включает в себя формирователь 1 состояния объектов, ко входам которого подключены датчики 2 уровня и датчики 3 режимов работы насосов через устройство. 4 ввода и вывода информации, причем Другой выход устройства 4 подключен к одному из входов блока 5 коммутации управляющих команд, к другим входам которого подключены соответствующие выходы формирователя 1 непосредственно и ч.ерёз блок б опроса К другому выходу блока б опроса подключен выход формирователя 7 критических параметров, входы которого через блок 8 прогнозирования параметров судна при погрузке соединены с датчиком 2 уровня, датчиками 9 посадки танкера и.блоками 10 и 11 контроля, соответственно посадки и прочности судна. Выходы блока 5 подключены к исполнительным механизмам 12 yi 13 затворов и насосов, сигнальным табло 14 - 16. На табло 14 высвечивается факт-ликвидации выбега критических параметр9в на табло 15 - информация о неисправности в
линии управления, на табло 16 - рекомендация к действию оператора. Блок 17 имитации датчиков своими выхОдами связан с входами формирователя 1 состояния объектов и блоком 8
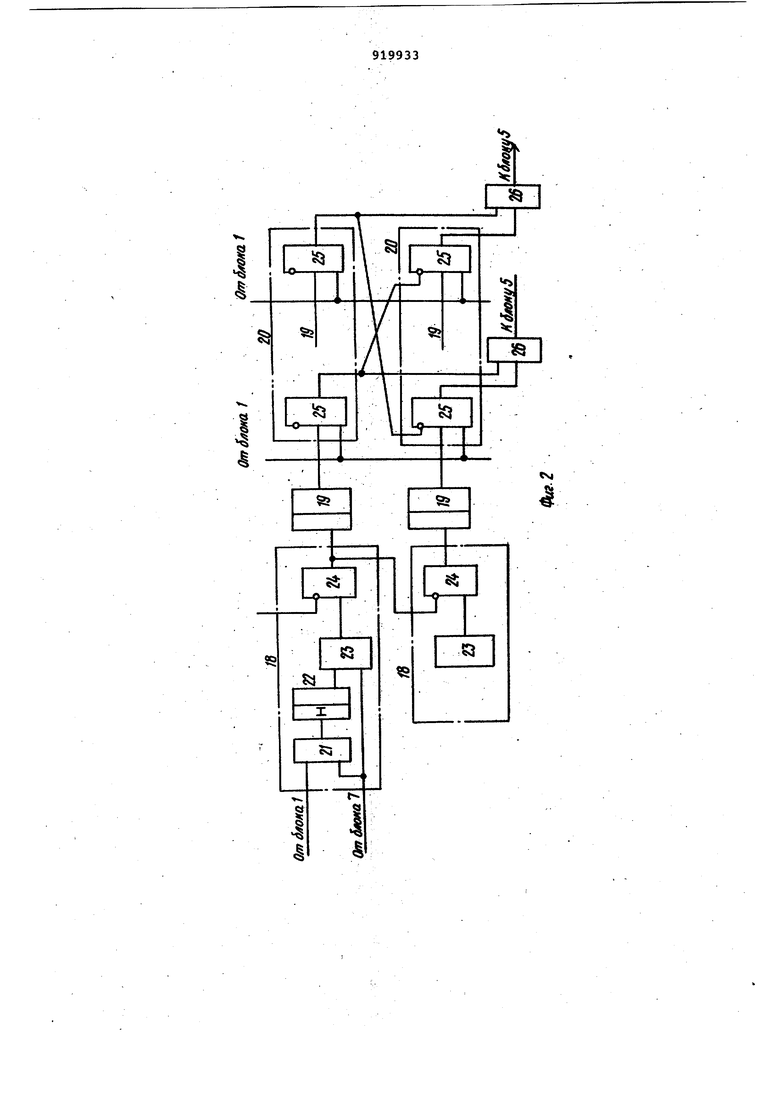
прогнозирования параметров судна, вход блока 17 имитации датчиков связан с выходом блока 5 коммутации управляющих комайд. Блок б опроса (фиг.2) состоит из матричных ячеек 18
0 управления регистрами 19 параметров прочности, крена, дифферента, осадки, генеральной линии и матричных ячеек 20 формирования управляющих команд. Связь матричных ячеек20
5 формирования управляющих команд с регистрами 19 параметров организована таким образом, что в первую очередь опрашиваются емкости, которые возмоисно подключить к процессу, а
0 затем емкости, которые мохсно отключить от процесса. Матричные ячейки 18 управления регистрами 19 переметров по приоритету содержат логическую цепочку, состоящую из элемента И 21j
5 соединенного через элемент Задержка 22 с одним из. входов элемента ИЛИ 23. Выход элемента ИЛИ 23 через элемент 24 И-НЕ, второй вход которого связан с выходом ячейки 18 управления регистром высшего приоритета, соединен с инверсным входом элемента 24 И-НЕ ячейки 18 управления регистром параметра низшего приоритета и своим регистром 19. Матричные ячейки 20 формирования управляющих команд содержат элементы 25 И-НЕ. Выходы элементов И-НЕ 25, формирующих команды через элементы 26 ИЛИ на пуск и остановку исполнительных механизкюв .12 и13, соединены перекрестно и с инверсными входами ячеек 20, которые работают с регистром параметра низшего приоритета. Входы элементов 25 И-КЕ соединены также с выходами формирователи 1 состояния объектов.
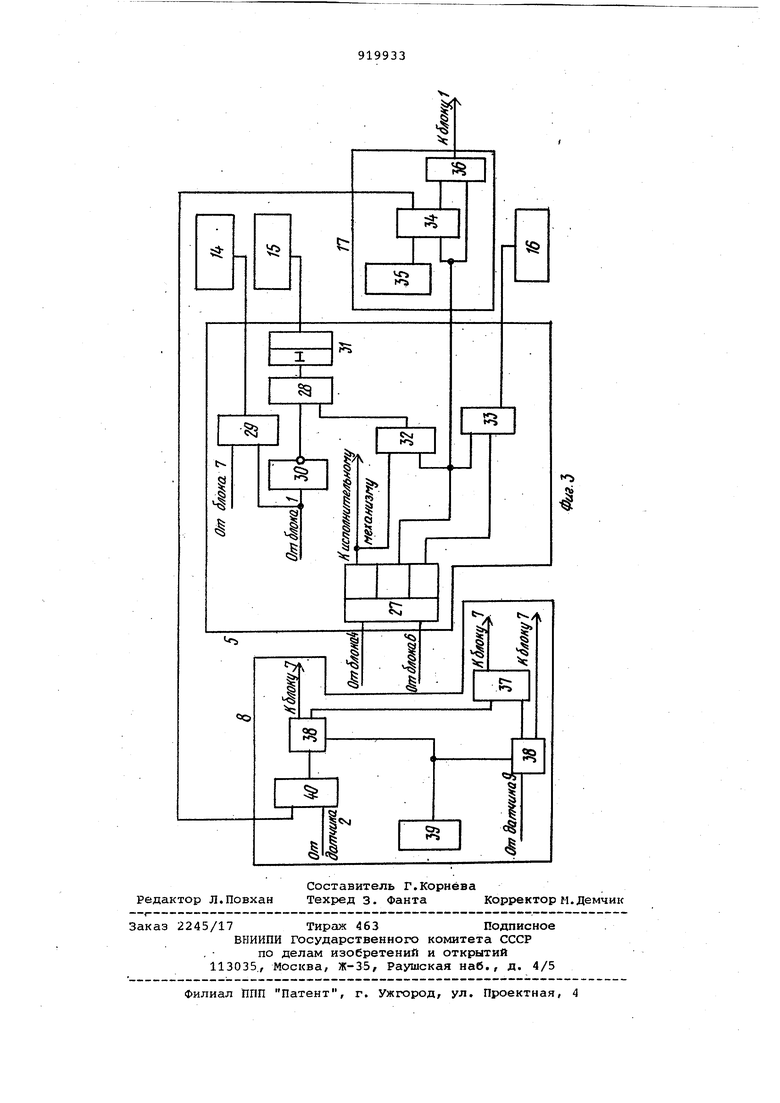
Блок 5 коммутации команд (фиг.З/, cocтoи т из переключателя 27, логических элементов 28 и 29 И, 30 НЕ, 31 Задержка, 32 и 33 ИЛИ. Выходы
0 переключателя 27 в режиме Автоматическое управление соединены с исполнительными механизмами, а через элемент 32 ИЛИ с одним из входов элемента 28 И, соединенного своим
е выходом через элемент 31 Задержка с сигнальным табло 15. Другой вход элемента 28 И соединен с выходом элемента 30 НЕ, вход которого соединен с одним из входов элемента 29 И, выход которого подключен к табло 14. Выходы переключателя 27 в режимах Проверка и Совет соединены через элемент 33 ИЛИ с табло 16.
Блок 17 имитации датчиков (фиг.З) 5 состоит из имитаторов датчиков 34
временных задатчиков 35 и элементов 36 И. Входы имитаторов 34 связаны с выходом переключателя 27 в режиме Проверка и выходами временных задатчиков 35, а первый выход имитаторов датчиков подключен к входу формирователя 1 состояния объектов через элемент 36 И, второй вход которого связан с выходом переключателя 27 в режиме Проберка. Второй выход имитаторов датчиков 34 подключен к блоку 8 прогнозирования параметров судна. Блок 8 прогнозирования параметров судна при погрузке (фиг.З) состоит из ячейки 37 предварения, триггера 38, ячейки 39 синхронизации и элемента 40 ИЛИ. Входы ячейки 37 предварения подключены через триггер 38 к датчикам 9 посадки танкера, а через триггер 38 и элемент 40 ИЛИ к датч;икам 2 уровня и имитаторам датчиков 34. Выходы триггеров 38 и ячейки 37 предварения подключены соответственно к формиррвателю 7 критических параметров. Выход ячейки 39 синхронизации подключен к триггерам 38.
Устройство работает следующим образом.
С устройства 4 для каждого конкретного случая погрузки - выгрузки в формирователь 1 состояния объектов вводятся конечные значения процесса грузовых операций по уровням. По посадке танкера вводятся конечные значения в формирователь 7критических параметров. После введения . плана грузовых программ и в зависимости от намеченной скорости проведения грузовых операций оператор на блоке 17 устанавливает рехшм работы каждого имитатора датчика 34 при ПОмощи временных задатчиков 35, т.е. устанавливается время заполнения или осушения каждой емкости. Пере-ключатель 27 устанавливается в положение Проверка, и система включается. Начинается процесс проверки введения плана проведения грузовых операций, в соответствии с ко-. нечнынй и текущими параметрами регистр 19 параметров генеральной линии осуществляет выбор необходимой матричной ячейки 20. Выходньае сигналы с матричных ячеек 20 через элементы ИЛИ 26 поступают на блок 5 коммутации управляющих команд, где через переключатель 27 приходят на вход имитаторов 34 датчиков и на вход элемента 36 И. Управляющие команды, таким образом, в режиме Проверка включают и выключают имитаторы датчиков 34 емкостей, на входе которых установлены объекты управления. После включения имитатора 34 на его выходе появляются два сигнала. Первый идёт на второй вход элемента 36 И, с выхода которого сигнал поступает на вход формирователя
1состояния объектов для получения информации о выполнении управляющей командой своей функции. Второй сигнал с имитатора датчика 34 поступает на вход элемента 40 ИЛИ блока 8 прогнозирования параметров судна при погрузке. С выхода элемента 40 ИЛИ этот сигнал идет на вход триггера 38, с которого циклически, в зависимости от работы ячейки 39 синхронизации может направляться на
o вход формирователя 7 критических параметров или через ячейку 37 предварения, или непосредственно для выработки предварительной и текуь ей информации о ходе протекания процес5са Проверка.
В ячейке 37 предварения производится последовательно преобразование аналоговых сигналов в цифровые, запоминание, вычисление скорости и
0 ускорения изменения параметров. Та- . кая обработка параметров позволяет осуществить прогнозирование изменения их во времени, получить на выходе ячейки 37 спрогнозированные значения параметров, т.е.. перейти
5 к динамической оценке изменения параметров. Скорость и ускорение изменения параметров определяются.по точечнь1м отборам текущих, значений параметров через время ДЬ. Скорость
0 определяется по формуле ) Х(„) .
Ускорение определяется по формуле
А Х|„) X{hj -2X(f,.) -bX h-2V
5 Прогнозируемое значение X(f, тогда равно:2
Щм) AX(n|f- Л хсп)+Х(п), где Хц - точечный.отбор от текущего значения параметра в еди0ницу времени.
Так как параметры прочности и остойчивости получаются расчетным путем на базе входных сигналов датчиков уровня 2, очень важно отбор точечных значений от всех датчиков
5
2и 9 осуществлять синхронно в одно и тоже время, для чего выход ячейки 39 синхронизации подключен
к входам триггеров 38. Обработанные в формирователях 1 и.7 сигналы по0ступают на блокб опроса для формирования последующих управляющих команд намеченной генеральной линии проведения грузовых операций.
В случае достижения граничного
5 значения параметра сигналом, поступившим на формирователь 7 критических параметров с выхода ячейки 37 предварения, начинает гореть ьюгающим светом лампа этого параметра на блоке 10 или 11 посадки и проч0ности танкера, извещая оператора о возможном выбеге параметра за допустимое зНачение. Одновременно этот сигнал с выхода- формирователя 7 критических параметров поступает на
5
входдл матричных ячеек 18 управления регистрами 19 параметров по приоритету. Регистр 19 осуидествляёт подключение матричной ячейки 20 формигрования управляющих команд, сигнал с которой идет на вход блока 5 коммутации управляющих команд через элементы 26 ИЛИ и перекрестно на запрещающие входы элементов 25 И-НЕ матричных ячеек 20 формирования управляющих команд, подключенных к регистрам 19 параметров низшего приортета. В блоке 5 сигнал через переключатель 27, элемент 33 ИЛИ идет на табло сигнализации 16 Рекомендация к действию.
Имея информацию о возможном выбеге параметра на мигающем табло блока 10 или 11 и рекомендацию по его устранению на табло 16, оператор производит корректировку намече«ной программы грузовых операций до момента выбега параметра,не прерывая и не останавливая процесса Проверка, Если в продолжение процесса выбега параметра не произойдет, то введенный в систему план проведения грузовых операций с учётом произведенной корректировки по предварительной информации о возможном выбеге параметра принимается к реализации. Переключатель 27 выбора режима работы переводится в положение Автоматическое управление или Совет.
Для выработки информации о ходе протекания процесса и о возможном выбеге парсхметра выходные сигналы да-тчиков 2 уровня, датчиков 3 режимов работы насосов и исполнительных механизмов 12 затворов начинают поступать на формирователь 1- состояния, объектов, а сигналы датчиков 2 уровня и датчиков 9 посадки танкера на формирователь 7 критических параметров через блок 8 прогнозирования параметров судна при погрузке чтобы максимально повысить быстродействие cиcтe шl и исключить тем самым влияние на процесс проведения грузовых операций внешних возмущающих воздействий.
На устройство 4 ввода и вывода информации сигналы датчиков поступают для дистанционного контроля.
В зависимости от заданных конечных значений параметров процесса и начального состояния исполнительных механизмов 12 затворов и. 13 насосов обработанные в формирователе 1 состояния объектов сигналы поступают в блок опроса 6, где начинается процесс выработки управляющих команд, аналогичный рех{иму Проверка Сформированные в блоке 6.опроса команды поступают напереключатель 27 блока 5 ког мутации управляющих команд. В режиме Автоматическое управлерше команды с переключателя
27 поступают на исполнительные механизмы 12 и 13. В режиме Совет команды с переключателя. 27 поступают через элементы 33 ИЛИ на табло 16 Рекомендация к действию. -Сигналы от 5 датчиков 2 уровня и 9 посадки танкера поступают на входы триггеров 33 и далее, циклически, в зависимости от работы ячейки 39 синхронизации .идут на формирователь 7 криQ тических параметров непосредственно или через ячейку 37 предварения, в случае поступления сигнала на вход формирователя 7 через ячейку 37 вырабадывается информация о возможном выбеге параметра за допустимое
5 значение, которая как и в режиме
Проверка идет на засветку табло
блоков 10 или 11 мигающим светом и
на засветку табло 16 Ревомендация
к действию. Это позволяет оператору заранее подготовить и принять меры к недопущению выбега или, в крайнем случае, избежать значительного заброса, параметра за допустимое граничное значение. Для выработки информации о выбеге параметра за допустимое значение сигнал на формирователь 7 критических параметров поступает непосредственно со вторых выходов триггеров 38. Если
Q текущее значение какого-либо параметра все-таки превзойдет допустимое значение, информация с формирователя 7 критических параметров поступит на соответстэующее табло бло, ков 10 или 11, которое загорится ровным светом, и на входы матричных ячеек 18 блока: опроса 6. В матричной ячейке 18 управления регистром 19 параметров по приоритету критический параметр поступает на вход
0 элемента 23 ИЛИ через элемент 24 , одновременно на запрещающий вход элемента 24 И-НЕ матричной ячейки 18 параметра низшего приоритета и на включение своего регистра 19
5 параметра для выработки управляющей команды с целью ликвидации выбега критического параметра. Регистр 19 осуществляет подключение той матричной ячейки 20 формироваQ ния управляк)щих команд, на которую не поступают запрещающие сигналы от матричной ячейки 18, подключенной к регистру 19 параметра высшего приоритета и имеются разрешающие сигналы формирователя 1 состояния объектов.После выбора емкости, которую необходимо подключить к процессу, и открытия затвора 12 сигнал поступает на вход формирователя 1 состояния объектов. Обработанный в формирователе 1 сигнал поступает на вход элемента 29 И для включения табло 14 Ликвидация выбега критического параметра. В случае формирования управляющей команды для ликвидации
5 выбега параметра путем от1слючения
емкости от процесса грузовых операций после выдерхски времени на элементе 22 сигналы о наличии выбега параметра с формирователя 7 и об отключении емкости с формирователя 1 состояния объектов поступают через элемент 21 И на вход элемента 23 ИЛ и далее, для выбора следующей рекомендации.
Таким образом, оператор одновременно получает информацию о выбеге критического параметра, о пути его устранения и о том, что начался процесс ликвидации выбега параме ра. В случае неисправности в линиях контроля и управления загорается табло 15 путем включения логической цепочки, состоящей из элементов 31 Задержка, 28 И, 30 НЕ и 32 ИЛИ.
Положительный эффект от введения блока прогнозирования параметров судна при погрузке, позволяющего оценить динамику изменения параметров, заключается в том, что повышается быстродействие системы, которое приводит к сокращению времени расчета плана проведения процесса грузовых операций, так как становится возможной своевременная корректировка плана, которая,не допус кает достижения параметрами граничных значений. ,:
Во время реализации плана грузовых операций наличие вновь введенного блока также позволяет сократить время грузовых операций. ,
Анализ изменения параметров в динамике, позволяющий избежать забросов параметров за допустимые границы, повыиает безопасность эксплуатации танкера, так как исключаются циклические перегрузки его корпуса, которые в конечном итоге могут привести к разлому судна и нанести большой ущерб в связи с разливом нети.
формула изобретения
Система управления грузовыми операциями на танкере по авт.св. № 753709, отличающаяся, тем, что, с целью повышения быстродействия, она снабжена блоком прогнозирования параметров ..судна при погрузке, состоящим из ячейки синхронизации и подключенных к ее выходу одними своиьш входами двух триггеров, одни и другие выходы которых подключены соответственно через ячейку предварения и непосредственно к одному из входов блоков формирования критических паргихетров, а другие входы одного и другого триггеров соответственно подключены к датчикам посадки непосредственно и через элемент ИЛИ - к датчикам уровня и имитатору датчиков.
Источники , информащш, принятые во внимание при экспертизе
1. Авторское свидетельство СССР 753709, кл. В 63 В 27/24,03.04.78 (прототип).
V
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления грузовыми операциями на танкере | 1978 |
|
SU753709A2 |
| Система управления грузовыми операциями на танкере | 1974 |
|
SU596498A1 |
| Устройство для предупреждения пожара | 1981 |
|
SU995819A1 |
| Устройство для управления рабочимипОСТАМи | 1979 |
|
SU840927A2 |
| Телеметрическое устройство | 1979 |
|
SU858061A1 |
| Устройство для контроля каналов управления и сигнализации судовых энергетических установок | 1984 |
|
SU1177797A1 |
| КОДОИМПУЛЬСНОЕ ПЕРЕДАЮЩЕЕ УСТРОЙСТВО С СОКРАЩЕНИЕМ ИЗБЫТОЧНОСТИ ИНФОРМАЦИИ | 2001 |
|
RU2234738C2 |
| МОДЕЛИРУЮЩИЙ КОАП | 2013 |
|
RU2516703C1 |
| Устройство для обработки информации датчиков | 1980 |
|
SU955093A1 |
| Устройство для измерения частоты гармонического сигнала | 1987 |
|
SU1525607A1 |
1
CNJ
«irf
Hi/JJ
ftoffU/tl
