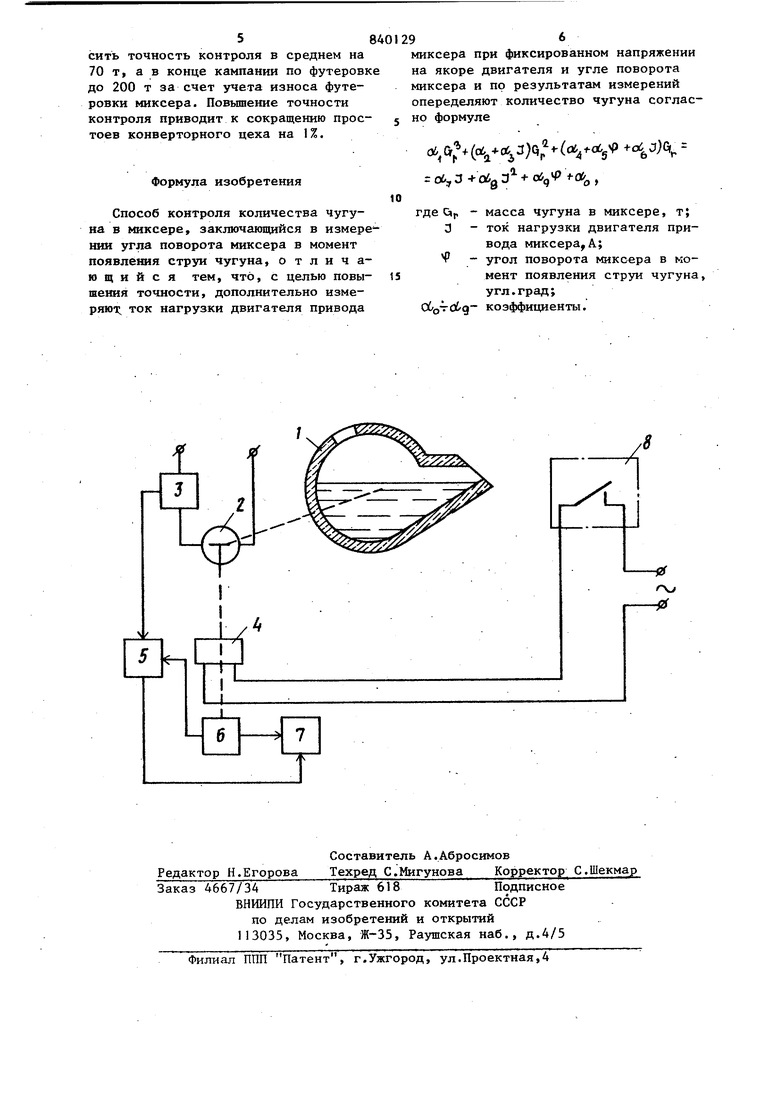
Изобретение относится к контролю процесса плавки в металлургической промышленности и может быть использовано в сталеплавильных цехах металлургических заводов, Иэвестен способ контроля количества чугуна в миксере, в котором измеряют массу чугуна, заливаемого в миксер и сливаемого из него, и количество чугуна вычисляют по разности меж ду этими величинами. Однако способ имеет низкую точность, так как погрешности при определении массы чугуна в отдельных ковшах накапливаются. Известен также способ измерения уровня расплава в агрегате, когда по известным геометрическим размерам последнего определяют количество чугуна , Недостатками способа являются его сложность, так как для измерения уров ня требуется сложная аппаратура, и низкая точность вследствие износа футеровки агрегата в процессе зксплуатации. Наиболее близким к предлагаемому по технической сущности является способ, заключающийся в измерении угла поворота миксера в момент появления чугуна. Недостатком способа является низкая точность вследствие износа футеровки агрегата в процессе эксплуатации, что приводит к снижению уровня расплава при одном и том же количестве чугуна, а вследствие этого - к увеличению угла поворота миксера в момент появления струи чугуна. Цель изобретения - повышение точности контроля, Эта цель достигается тем, что измеряют ток нагрузки двигателя привода миксера при фиксированном напряжении на якоре двигателя и угле поворота миксера и по результатам из3мерений определяет количество; чугуна по формуле .)Q ot CJ-K}6gO -(, . где 0f - масса чугуна в миксере , Т; 3 - ток нагрузки двигателя привода миксера А; Ф - угол поворота миксера в момент появления струи чугуна угл.град; 0(07обд - коэффициенты. Измерение тока нагрузки двигателя привода миксера позволяет определить влияние износа его футеровки на зависимость между количеством чугуна и углом поворота миксера в момент появления струи чугуна. На чертеже предс/гавлена блок-схем устройства для реализации способа. Устройство содержит миксер 1, дви гатель 2 привода миксера, датчик 3 тока., электромагнитную муфту 4, изме ритель 5 тока, измеритель 6 угла пово рота миксера, вычислительный блок 7 датчик 8 момента появлегшя струи чугуна , Сущность способа состоит в том, что измеряют угол поворота миксера в момент появления струи чугуна, ток нагрузки двигателя привода миксера при фиксированном напряжении на яко двигателя и угле поворота миксера и по результатам измерений определяют количество чугуна. Количество чугуна в миксере связано с измеряемыми параметрами при сливе чугуна соотношением (M).R)mi (Q,,T)A, (1) где Gip - масса чугуна в миксере,т; 9 - угол поворота миксера в момент появления .струи чугуна угл.град; R - радиуд эквивалентного цилин ра футеровки миксера,м; О - ток нагрузки двигателя -при вода миксера, А. Аналитическая форма системы () для угла поворота миксера от горизон тальной оси, равного 5 угл.град (уго поворота миксера в 5 угл.град меньше его холостого хода для слива чугуна при максимальном его наполнении, поэтому при повороте миксера для слива 9 4 чугуна агрегат,всегда прохсдит.это положение), имеет вид г Vp,,13.5 C |b t T2 f|lgQ A, где коэффициенты-уравнений. Из системы (2) получаем o,,i o6j:j)Q4(b6.o.ct JX 0 +0, . I t 9 о Коэффициенты обдг определяются конструкцией и емкостью миксера, типом двигателя привода, напряжением на якоре двигателя, определяющем скорость вращения миксера. Так, для условий миксера емкостью 1300 т, приводимого во вращение двигателем МП-62, при максимальной скорости вращения коэффициенты равны 298 т ; at, 5,721р т- ,оС Ctl 4. (А ТГ; 12,606; ctg -0,241 град- ,a(.f, -0,24 А ; еб7 36 т/А; сх;9 1,41 т/град аСд -46,53 т/град; -138 т. Способ осуществляется следующим образом. Контролируют угол поворота миксера 1, для чего двигатель 2 привода миксера соединяют через злектромагнитную муфту 4 с измерителем 6 угла поворота миксера. Электромагнитную муфту подсоединяют к датчику 8 момента появления струи чугуна. В тот же момент электромагнитная муфта 4 срабатывает и измеритель 6 фиксирует угол поворота миксера. Ток нагрузки двигателя привода миксера измеряют датчиком 3 тока и передают в измеритель 5. При достижении угла поворота миксера, равного 5 град , передают сигнал от измерителя 6 угла поворота миксера в измеритель 5 тока и фиксируют ток нагрузки. Значение тока нагрузки двигателя привода миксера и угла поворота миксера в момент появления струи чугуна передают с измерителей 5 и 6 соответственно в вычислительный блок 7, в котором вычисляют массу чугуна в миксере согласно выражению (З). Испытание макета устройства, реализующего предлагаемый способ, показало, что использование предлагаемого способа контроля позволяет повысить точность контроля в среднем на 70 т, а в конце кампании по футеровке до 200 т за счет учета износа футеровки миксера. Повышение точности контроля приводит к сокращению простоев конверторного цеха на 1 %.
Формула изобретения
Способ контроля количества чугуна в миксере, заклкгчанлцийся в измере нии угла поворота миксера в момент появления струи чугуна, отличающийся тем, что, с целью повышения точности, дополнительно измеряют ток нагрузки двигателя привода
миксера при фиксированном напряжении на якоре двигателя и угле поворота миксера и по результатам измерений опеределяют количество чугуна согласно формуле
(V)Qp(o,a6gVp )G,
0,3 -aig3 +0( tO(/
о
масса чугуна в миксере, т; ток нагрузки двигателя привода миксера, А;
угол поворота миксера в момент появления струи чугуна, угл.град; козффициенты.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ контроля количества чугуна в миксере | 1985 |
|
SU1308632A2 |
| Устройство контроля количества чугуна в миксере | 1979 |
|
SU908833A1 |
| Устройство контроля количества чугуна в миксере | 1986 |
|
SU1325084A1 |
| Способ управления положением фурмы кислородного конвертера | 1979 |
|
SU870444A1 |
| Способ контроля количества чугуна в миксере и износа футеровки | 1985 |
|
SU1271883A1 |
| Способ определения содержания углерода в железоуглеродистых расплавах | 1980 |
|
SU897861A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ СОДЕРЖАНИЯ | 1973 |
|
SU397845A1 |
| Устройство определения содержания углерода в железоуглеродистых расплавах | 1980 |
|
SU883740A1 |
| ИНФОРМАЦИОННАЯ СИСТЕМА МОНИТОРИНГА ТРАНСПОРТИРОВКИ ЖИДКОГО ЧУГУНА | 2016 |
|
RU2669095C2 |
| Устройство управления положением фурмы конвертера | 1980 |
|
SU899658A1 |
