(54) УСТРОЙСТВО УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ ФУРМЫ КОНВЕРТЕРА
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления положением фурмы кислородного конвертера | 1979 |
|
SU870444A1 |
| Устройство контроля количества усвоенного кислорода конвертерной ванной | 1983 |
|
SU1134609A1 |
| Устройство контроля уровня ванны в конвертере во время продувки | 1981 |
|
SU973625A1 |
| Устройство контроля температуры металла в конвертере | 1982 |
|
SU1047962A1 |
| Устройство контроля температуры металла в конверторе | 1980 |
|
SU1073290A1 |
| Устройство для контроля уровня ванны в конверторах | 1981 |
|
SU1006499A1 |
| Устройство определения момента прекращения продувки кислородного конвертера | 1991 |
|
SU1765186A1 |
| Устройство контроля содержания углерода в ванне конвертера | 1983 |
|
SU1097684A1 |
| Устройство управления конверторной плавкой | 1988 |
|
SU1539211A1 |
| Устройство для контроля уровня ванны в конвертере | 1987 |
|
SU1463769A1 |

1
Изобретение относится к области контроля процесса плавки в металлургической промышленности, в частности к управлению положением фурмы, и может быть осуществлено в конвертерных цехах металлургТ1Ческих заводов.
Известно устройство управления положением фурмы, содержащее датчик положения фурмы относительно неподвижных конструкций конвертера, соединенный с регулятором, который, кроме того, подключен к задатчикуС Однако устройство имеет низкую точность, так как разгар футеровки приводит к изменению уровня металла и вследствие этого изменяется положение фурмы относительно уровня металла .
Известно также устройство, содержащее систему контроля положения фурмы, имеющую сельсин-датчик, ротор которого механически связан с валом лебедки, сельсин-приемнчк, функциональный преобразователь и корректирующий преобразователь, рамка которого кинематически связана со статором сельсин-приемника, выполненного подвижным. Кор1 ектирующин преобразователь позволяет ввести в устройство коррекцию по контрольному измерению положения фурмы с помощью металлического штыря, привариваемого к фурме 2 ,
10
Однако устройство имеет низкую точность, так как разгар футеровки в нем учитывается лишь периодически.
Наиболее близким к изобретению является устройство, содержащее дат15чик положения фурмы, механически соединенный с валом лебедки перемещения фурмы, задатчик, регулятор, исполнительный меха1шзм, блок учета разгара футеровки, вход которого
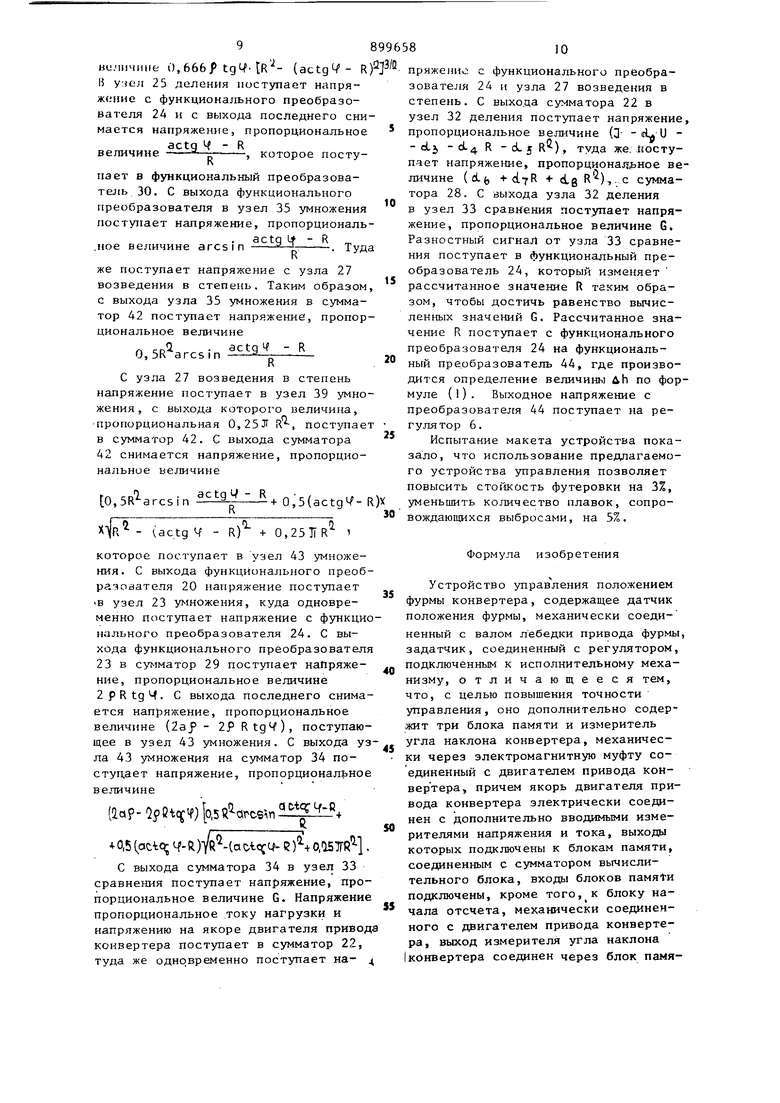
10 соединен с блоком определения качества плавок по кампании футеровки, а выход - с регулятором положения фурмы З 3 38 Недостатком устройства является низкая точность управления, так как учет количества плавок по кампа нии футеровки конвертера характеризует разгар футеровки конвертера с большой погрешностью. Кроме того, в случае торкретирования футеровки, т.е., уменьшения разгара, известное устройство не эффективно, так как его применение приводит к неправильному учету изменения уровня металла и вследствие этого к неправильной установке фурмы относительно уровня металла. Цель изобретения - повышение точности управления. Эта цель достигается тем, что уст ройство управления, содержащее датчи положение фурмы, механически соединенный с валом лебедки привода фурмы, задатчик, соединенный с регулято ром, подключенным к исполнительному меха}шзму, дополнительно содержит три блока памяти и измеритель угла наклона конвертера, меха1-шчески чере электромагнитную муфту соединенный с двигателем привода конвертера, причем якорь двигателя привода конверте ра электрически соединен с дополнительно вводимыми измерителями напряжения и тока, выходы которых подключены к блокам памяти соединенным с сумматором вычислительного блока, входы блоков памяти подключены, кроме того, к блоку начала отсчета, механически соединенрюго с двигателем привода конвертера, выход измерителя угла наклона конвертера соединен через блок памяти с блоком фиксации момента появления шлака, подключенны к электромагнитной муфте, которая, кроме того, подключена к блоку начала отсчета, а выход блока памяти свя зан с входными функциональными преобразователями вычислительного блока причем регулятор соединен с. выходным функциональным преобразователем вычислительного блока. При выпуске металла угол наклона конвертера, при котором наступает мо мент появления шлака, является функцией массы шлака в конвертере и теку щего радиуса эквивалентного цилиндра футеровки (величины разгар. футеровки конвертера). Ток нагрузки на якоре двигателя привода конвертера явля ется функцией названных величин и гапряжения на якоре двигателя. Таким образом, наличие перечисленных существенных признаков позволяет определить истинный разгар футеровки конвертера и произвести соответствующее управление положением фурмы. На фиг. 1 представлена блок-схема предлагаемого устройства на фиг. 2 - блок-схема вычислительного блока. Устройство содержит вал лебедки 1 привода фурмы 2, датчик 3 положения фурмы, регулятор 4, задатчрк 5, вычислительный блок 6, исполнитель шй механизм 7 привода фурмы, двигатель 8 привода конвертера 9, измеритель 10 тока, измеритель 11 напряжения, блок 12 начала отсчета, электромагнитная муфта 13, измеритель 14 угла наклона конвертера, блоки 15-17 памяти, блок 18 фиксации момента появления шлака, ковш 19, функциональные преобразователи 20-21, сумматор 22, (I - положение конвертера при продувке, II - положение конвертера при выпуске металла). Вычислительный блок содержит функт циональные преобразователи 20 и 21 сумматор 22, узел 23 умножения, функциональный преобразователь 24, узел 25 деления, сумматор 26, узел 27возведения в степень, сумматоры 28и 29, функциональный преобразователь 30, узел 31 возведения в степень, узел 32 деления, узел 33 сравнения, сумматор 34, узел 35 умножения, сумматор 36,узел 37 умножения, узел 38 возведения в степень, узел 39 умножения, узел 40 извлечения корня, узел 41 умножения, сумматор 42, узел 43 умножения, функциональный преобразователь 44. Узлы вычислительного блока выполнены, например, на базе преобразователей Харьковского завода КИП 20-23, 26-28, 30-3.1, 33-34, 36., 38, 40, 42- функциональные преобразователи типа ПФФ-, 24, 25, 32, 35, 37, 41, 43- функциональные преобразователи типа ПЭФ; 29 - задатчик типа ДЗПФ, 39 - переменный резистор. Вал лебедки 1 фурмы 2 механически соединен с датчиком 3 положения фурмы, выход которого соединен с регулятором 4. Вход регулятора 4 соединен, кроме того, с задатчиком 5 и выходным функциональным преобразователем 44 вычислительного блока 6. Выход регулятора А соединен с исполнительным механизмом 7 привода фурмы. Двигатель 8 привода конверте pa 9 электрически соединен с измерителями 10 тока и II напряжения, а механически - с блоком 12 начала отсчета и через электромагнитную муфту 13 с измерителем 14.угла наклона конвертера. Измерители 10 тока и 11 напряжения соединены между собой. Выходные преобразователи измерителей 10 тока и 11 напряжения через блоки 15 и 16 памяти соединены с сумматором 22 вычислительного блока 6. Выход измерителя 14 угла наклона конвертера соединен через блок 17 памяти с входньми функциональными преобразователями 20 и 2I вычислительного блока 6. Электромагнитная муфта 13 электрически соединена с блоком 18 фиксации момента появления шлака, который, кроме того , соединен с блоком 17 памяти Вход блока 12 начала отсчета механически соединен с двигателем 8 привода конвертера, а выход - со входами блоков 15 и 16 памяти и электромагнитной муфрой 13, Выход функционального преобразователя 20 соединен с узлами 37 и 23 умножения. Вход узла 37 умножения со единен, кроме того, через узел 38 возведения в степень, узел 40 извлечения корня, сумматор 36, узел 31 возведения в степень, сумматор 26 с функциональным преобразователем 2 Вход сумматора 26 соединен, кроме то го, с функциональным преобразователем 24, а выход - через узел 25 деления , функциональный преобразователь 30, узел 35 умножения - с сумма тором 42. Другой выход сумматора 26 подсоединен через узел 41 умножения также к сумматору 42. Выход функционального преобразователя 24 подсоеди нен к узлу 25 деления, сумматору 22 узлу 27 возв-едения в степень и через сумматор 28, узел 32 деления к узлу 33 сравнения. Выход функционального преобразователя 20 подсоеди нен через узел 23 умножения и сумматор 29 к узлу 43 умножения. Выход узла 27 возведения в степень соедииен через сумматор 22 с узлом 32 де.ления, с сумматорами 28 и 36, узлом 35 умножения и через узел 39 умножения с сумматором 42. Выход сумматора 42 соединен через узел 43 умножения сумматор 34, узел 33 сравнения с функциональным преобразователем 24. Узел 37 умножения соединен с суммато ром 34, а функциональный преобразоатель 24 - с функциональным преобазователем 44. В соответствии с величиной разгаа футеровки конвертера фурму опусают согласно соотношению ci.+ рГГ де дИ, - изменение положения фурмы, м i i-i)OLi - кoэффициeнты R - текущий радиус эквивалентного цилиндра футеровки конвертера, характеризующий разгар футеровки, определяемый из соотношений (11о..с)Со.5 , +0,5(0 ftq;i -ti), jtj 0,6€6tp;4 R(. -, 3 ( dL l+A5RЧ{cL 4(ц;i+ig г)a UgV, де G - масса шлака в конвертере, Р - плотность шлака, -т/м , а - расстояние по образующей эквивалентного цилиндра от днища конвертера до кромки сталевыпускного отверстия, м; Ч - угол наклона конвертера от вертикальной оси в момент появления шлака и.з сталевыпускного отверстия, у гл. г рад-, J - ток нагрузки на якоре двигателя привода конвертера, А-, и - напряжение на якоре двигателя привода конвертера, В-; ctj -oLg - коэффициенты. Коэффициенты зависят от онструкции и емкости конвертера, ипа двигателя привода конвертера, пределяющего скорость вращения конертера, угла наклона последнего. ак, для условий конвертера емкостью 30 т, приводимого во вращение электодвигателем МП-82, при угле налона 10® от вертикали,. 1,742 м} u(i 3.48 м аг) -211,5 А; 01,4395 А/м, dL5 -106 А/м, д-б 33,4 А/т; i-4 -31 ,Ь А/т.м; aLg7,76 А/ТтмЧ «Ig -0,246 А/В. Устройство управления положением фурмь конвертера работает следующим образом. Сигнал, пропорциональньй положению фурмы относительно неподвижных конструкций конвертера, поступает с датчика 3 положения фурмы, приводимого во вращение валом лебедки 1 привода фурмы 2, на регулятор 4. Туда же поступает сигнал, пропорцио нальный заданному значению положени фурмы от задатчика 5, и величина .изменения положения фурмы в результате разгара футеровки от выходного функционального преобразователя 44 вычислительного блока 6. Регулятор 4 управляет исполнительным механизмом 7 привода фурмы 2. При повалке конвертера 9 для выпуска металла двигателем привода 8 поворот двигателя передается в блок 12 начала отсчета и на электромагнитную муфту 13. Напряжение и ток нагрузки на якоре двигателя привода конвертера измеряют соответственно измерителями П и 10. Измеренные значения поступают в блоки 16 и 15 памяти (в качестве которых могут использовать ся преобразователи Харьковского завода кип) и отрабатываются ими. При равенстве утла наклона конвертера Ю от вертикали срабатываю контакты в блоке начала отсчета, останавливающи.е блоки 16 и 15 памят на значениях напряжения и тока нагрузки, соответствующих моменту про хождения этого угла. Муфта 13 разом нута, и поэтому вращение не передается на измеритель I4 угла наклона конвертера. При прохождении минималь ного угла наклона конвертера, при ко тором возможно появление шлака при максимальном его количестве (для условий 130-тонных конвертеров этот угол соответствует бО от вертикали срабатывает контакт в блоке 12 нача ла отсчета, включающий электромагнит ную муфту 13. При дальнейшем вращении двигателя .... „„„„..„. „г--, „ 8 привода конвертера 9 угол отрабаты вается измерителем 14 угла наклона конвертера и передается в блок 17 па мяти. При появлении шлака срабатывае блок 1В фиксации момента появления шлака, размыкающий электромагнитную муфту 13 и блок 17 памяти, который фиксирует угол наклона конвертера от вертикальной оси в момент появления шлака из сталевыпускного отверстия. Напряжения, пропорциональные: гжичекиям параметров из блоко 16 и 15, поступают на сумматор 22 вычислительного блока 6, а напряжение из блока 17 - на входные функциональные преобразователи 20 и 21 Bbi4viCJtnTe;ifaHoro блока 6. В вычислительном блоке производится определение изменения положения фурмы, связанного с износом футеровки, которое с выходного функционального преобразователя 44 вычислительного блока 6 поступает на регулятор 4. Вычислительный блок работает следующим образом. Напряжение, пропорциональное углу наклона конвертера от вертикальной оси в момент появления шлака из сталевыпускного отверстия, поступает в функциональные преобразователи 20 и 21, где соответственно определяются величины tg , actgM . Напряжение, пропорциональное последней величине, поступает в сумматор 26, в который, кроме того, поступает с функциональ-, ного преобразователя 24 напряжение, пропорциональное вычислительному значению текущего радиуса эквивалентного цилиндра футеровки конвертера, С выхода сумматора 26 снимается напряжение, пропорциональное величине actg i-f - R, которое поступает в узлы 31, 41 и 25 соответственно возведения в степень, умножения и деления. С выхода узла 31 в сумматор 36 поступает напряжение, пропорциональное величине (actg Ч - R), в который, кроме того, поступает напряжение от узла 27 возведения в степень, пропорциональное величине R. Суммарное напряжение, пропорциональное величине R - (actq Ч - R) поступает в узел 40 извлечется корня, с выхода которого напряжение, пропорциональное величине i R - (actg f - R) поступает в узлы 41 умножения и 38 возведения в степень. С выхода узла 41 умножения на сумматор 42 поступает напряжение,пропорцирнальнре в диЧйй 0,5{actg4 - R) 2 - (actg Ч - R) С выхода узла 38 возведения в степень в узел 37 умножения напряжение, пропорциональное величине jactg V - R)Uj2. Туда же поступает напряжение, пропорциональное величине tg Lf , с функционального преобразователя 20. С выхода узла 37 умножения на сумматор 34 поступает напряжение, пропорциоилльное 9 нилпчиме 0,666Я (actgl - R 15 y.tan 25 деления поступает напряжение с функционального преобразователя 24 н с выхода последнего сни мается напряжение, пропорциональное actg Ч - R величине -, которое поступает в функциональный преобразователь 30. С выхода функционального преобразователя в узел 35 умножения поступает напряжение, пропорциональ actg If - R ,пое величине arcs in же поступает напряжение с узла 27 возведения в степень. Таким образом с выхода узла 35 умножения в сумматор 42 поступает напряжение, пропор циональное величине - R О,3R arcsin R С узла 27 возведения в степень напряжение поступает в узел 39 умно жения, с выхода которого величина, пропорциональная 0,25 К, поступае в сумматор 42. С выхода сумматора 42 снимается напряжение, пропорциональное величине actgt - R 0,5R arc5in + 0,5(R - (actg Ч - R) + 0,25TiR 1 которое поступает в узел 43 умножения. С выхода функционального преоб разователя 20 напряжение поступает в узел 23 умножения, куда одновременно поступает напряжение с функци нального преобразователя 24. С выхода функционального преобразовател 23 в сумматор 29 поступает напряжение, пропорциональное величине 2pRtg4. С выхода последнего снима ется напряжение, пропорциональное величине (2af - ), поступаю щее в узел 43 умножения. С выхода у ла 43 умножения на сумматор 34 поступает напряжение, пропорционально величине (Дар- Qf Ctcc) о,5(агс9дп 0,5 (attq; 4-R)()4 О.ОБТК С выхода сумматора 34 в узел 33 сравнения поступает напряжение, про порциональное величине G. Напряжени пропорциональное току нагрузки и напряжению на якоре двигателя привод конвертера поступает в сумматор 22, туда же однрвременно поступает на810пряжение с функционального преобразователя 24 и узла 27 возведения в степень. С выхода сумматора 22 в узел 32 деления поступает напряжение, пропорциональное величине (З- «U U -fij 4 5 ) г туда же. tiocTyпает напряжение, пропорциональное величине (dfc +d7R AS R)i.c сумматора 28. С выхода узла 32 деления в узел 33 сравнения поступает напряжение, пропорциональное величине G. Разностный сигнал от узла 33 сравнения поступает в функциональный преобразователь 24, который изменяет рассчитанное значение R таким образом, чтобы достичь равенство вычисленных значений G. Рассчитанное значение R поступает с функционального преобразователя 24 на функциональный преобразователь 44, где производится определение величины ДЬ по формуле (1). Выходное напряжение с преобразователя 44 поступает на регулятор 6. Испытание макета устройства показало, что использование предлагаемого устройства управления позволяет повысить стойкость футеровки на 3%, уменьшить количество плавок, сопровождающихся выбросами, на 5%. Формула изобретения Устройство управления положением фурмы конвертера, содержащее датчик положения фурмы, механически соединенный с валом лебедки привода фурмы, задатчик, соединенный с регулятором, подключенным к исполнительному механизму, отличающееся тем, что, с целью повышения точности управления, оно дополнительно содер,жит три блока памяти и измеритель угла наклона конвертера, механически через электромагнитную муфту соединенный с двигателем привода конвертера, причем якорь двигателя привода конвертера электрически соединен с дополнительно вводимыми измерителями напряжения и тока, выходы которых подключены к блокам памяти, соединенным с сумматором вычислительного блока, входы блоков пaмяtи подключены, кроме того,к блоку начала отсчета, механически соединенного с двигателем привода конвертера, выход измерителя угла наклона конвертера соединен через блок памяII
ти с блоком фиксации момента появления шлака, подключенным к электро магнитной муфте, которая, кроме того, подключена к блоку начала отсчета, а выход блока памяти связан с входными функциональными преобразователями вычислительного блока, причем регулятор соединен с выходным функциональным преобразователем вычислительного блока.
Источники информации, принятые во внимание при экспертизе
89965812
М
«-
f
31
W
