. . 1 - Изобретение относится к автоматМ и вычислительной технике и может быть использовано в позиционных системах программного управления, предназначенных для транспортировки объекта в определенной последователь-, ности по рабочим позициям, технологической линии. Известно устройство для позиционного управления приводом перемещения объекта, содержащее элемент задания места остановки, выполненный в виде позицигунного распределителя, датчик фактического положения объекта, выполненный на базе многоконтактных переключателей, и исполнительные реле tl. , Недостатком этого устройства явля ется низкая помехозащищенность изза большого количества контактов дат чика фактического положения, задейс вованных в цепи управления перемещением -на п позиций требуется 2п + 2 контакта. Известно также устройство для авт матического управления перемацением объекта, содержащее источник питания, элементы задания адреса, датод положения объекта, командные блоки и релейный элемент 2. Однако это устройство имеет низкую надежность и помехозащищенность вследствие невозможности точного подбора элементов устройства, а также из-за естественной дестабилизации характеристик элементов cxewi во время эксплуатации. Кроме того, необходимость специального подбора элементов многоступенчатого делителя (для обеспечения неизменности и равенства величин напряжений его ступеней) и исполнительных блоков и релейного элемента (для надежности их срабатывания при большом диапаэрие изменений входных напряжений) снижает возможности реали зации н нещежности его работы, так как уход характеристик любого элемента приводит к сбоям. ВгшОолее близким по технической сущности и достигаемому результату к изобретению является устройство для программного задания сигналов перемещения объекта, содержащее датчики положения объекта, переключатель, элементч ЗАПРЕТ, включенные на выходах устройства 13. Однако устройство обеспечивает управление перемещением объекта только по четырем рабочим позициям, фиксируемам датчиками после установки переключателя в соответствующее необ1:одимой позиции положение. При этом схема его логической части содержит десять Многовходовых логических элементов (четыре элемента ИЛИ и шесть элеменТов ЗАПРЕТ), в общемслучае, когда требуется управлять перемещением объекта по п позициям, она содержит п - 2) лопгческих элемента.
, Например, при управлении перемещением тележки фотоупора, регулирукяцей положение концов раската под обрезку, логическая часть устройства построена из 43-58 логических элементов. Схема этого устройства построена таким образом, что сигналы всех датчиков и, контактов переключателя подаются на входы логических элементов и при Эксплуатации несут логическую нагрузку поэтому помеха даже в одном из 2п (п - число рабочих позиций) каналов связи вносит сбой в работу всего устройства. Протяженность соединительных линий между датчиками и переключателем, которая в реальных производственных условиях как правило значительна, еще более увеличивает вероятность появления сбоев.
Кроме того,-при переключении переключателя из исходной позиции через несколько положений его контакт,при прохождении через промежуточные положения создает кратковременный сигнал Вперед, т.е. вся схема устройства оказывается в неустойчивом состоянии. Постоянный сигнал Вперед сформируется только при установке переключателе в нужную позицию, что также снижает эксплуатационные характеристики устройства и его надежность.
Цель изобретения - расширение области применения за счет возможноети реализации перемещения: объекта при неограниченном количестве рабочих позиций и повышение надежности и помехозащищенности устройства.
Поставленная цель достигается тем, что устройство, содержащее датчики положения исполнительного элемента, подключенные выходами к первым ёходам программного переключателя, первый выход которого соединен с первыми входами элементов И, содержит фазовый дискриминатор и делитель напряжения, подключенный выходами к вторым входам программного переключателя, второ выход которого соединен с входом фазового дискриминатора, подключенного к вторым входам элементов И.
Кроме того, дискриминатор содержит два усилителя, подключенные входами через конденсатор к входу дискриминатора, а выходами - через триггер к выходам дискриминатора.
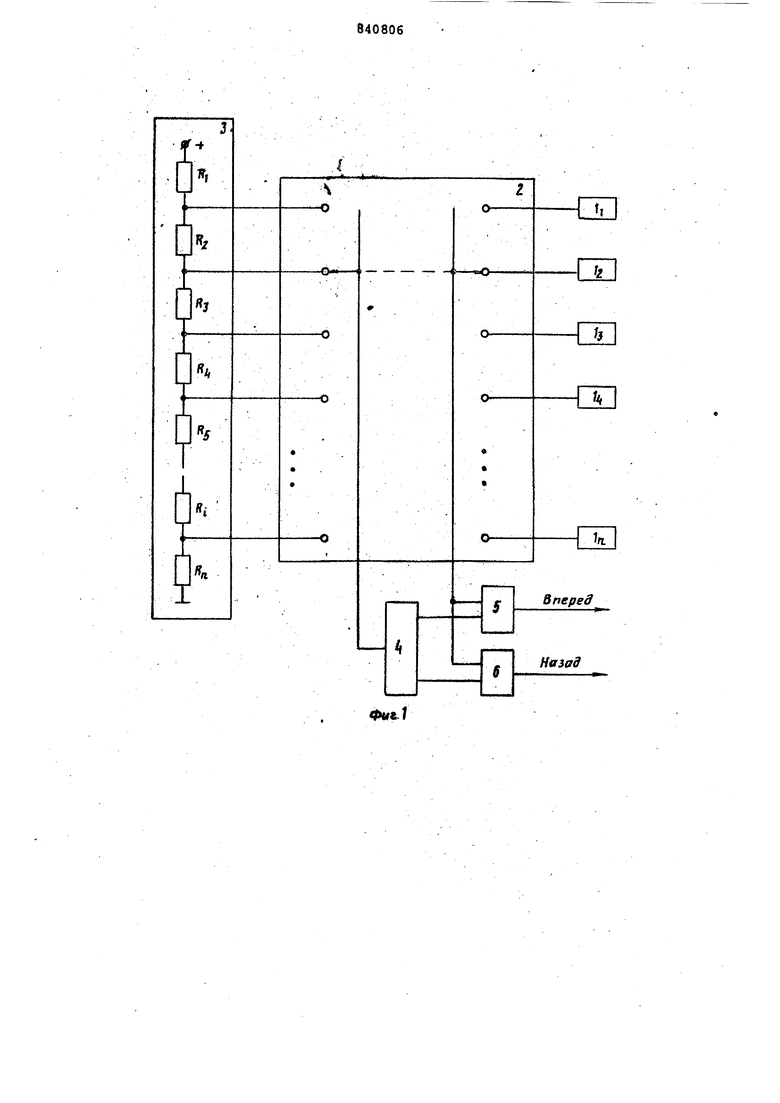
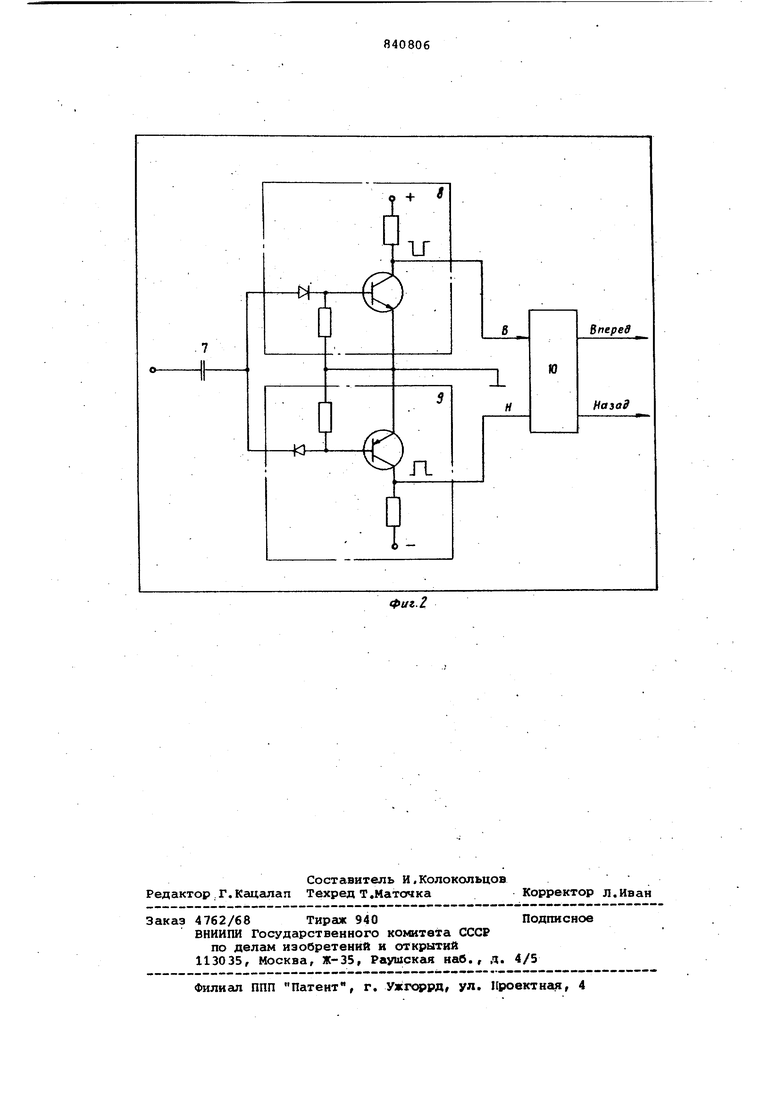
На фиг, 1 показана схема устройства; на фиг, 2 - схема фазового дискриминатора.
Устрсэйство содержит датчики X, - 3 у, положения исполнительного элемента, программный переключатель 2, делитель 3 напряжения, фазовый дискриминатор 4 и элементы 5 и 6 И.
Дискриминатор 4 содержит конденсатор 7, включеннь1й на общён входе усилителей 8 и 9, выходы которых подключены к триггеру 10.
Переключатель 2 выполнен на два направления, к выходам одного из которых подключен делитель 3, а его общий контакт соединен с входом дискриминатора 4. Выходывторого направлени переключателя 2 соединены с соответствующими датчиками 1 - 1 положения а общий контакт этого направления соединен с установочными входами элементов 5 и б И. Количество рабочих позиций практически не ограничено и определяется только числом датчиков 1. Переключатель может быть выполнен бесконтактным, например, на элементах БВК, КВД. Каждому положению переключателя 2 соответствует положение объекта, фиксируемое соответствугадим датчиком 1.
Делитель 3 выполнен резистивным (на резисторах R), но может быть и диодным. Подбора одинаковых ступеней не.требуется - важно наличие ступени, перепада напряжения.
Устройство работает следующим образом.
При положении, например, на первой позиции, объект воздействует на датчик 1, сигнал с выхода которого по цепи соответствующий этому датчику контакт переключателя 2 - общий котакт этого же направления блокирует элементы 5 и б И. Сигналы на выходах устройства в этом случае отсутствуют.
На входе дискриминатора 4 имеется потенциал, соответствующий параметрам первой ступени делителя 3, конденсато
7дискриминатора 4 заряжен до напряжения этой ступени, его усилители
8и 9 находятся в исходном состоянии, а триггер 10 по обоим выходам - в состоянии О, которое устанавливаетс по сигналу с общего контакта второго направления переключателя 2 (не показано) . Для перемещения объекта на
i-ю позицию контактор переключателя 2 устанавливается в положение, соответствующее этой позиции. При этом при переклх}чении .переключателя 2 с первого положения блокировка с элементов 5 и б И снимается, а в моменты перехода контактора переключателя 2 через промежуточные контакты до соответствующей позиции 1 в дискриминаторе 4 отрицательными перепадами напряжения Значения напр5йсений этих ступеней уменьшаются) с переключателя 2 формируются сигналы на перемеще ние объекта Назад, Элемент 6 И
выдает сигнал управления.на перемацение объекта Назад.
ОбъекТ| двигаясь назад, последовательно проходит датчиками всех предыдущих позиций, сигналы которых отключены от схемы переключателем 2 и не влияют на ее работку. При установке объекта в позицию i сигналы с датчика 1 по цепи датчик Ц - соответствующий контакт переключателя 2 общий контакт переключателя 2. блокирует элементы 5 и б И и устанавливает триггер О в состояние О. Сигнал управления на выходе элемента б снимается, и объект останавливается.
При вызове объекта, например, с h-ой позиции на первую, движок перекл .чателя устанавливается в положение 1, блокировка с элементов 5 и б И снимаеся, и в моменты перехода контакта переключателя 2 через промежуточные контакты дискриминатор 4 по положительным перепадам напряжения делителя 2 через конденсатор 7 и усилитель 8 формирует сигналы на перемещение Вперед, которыми устанавливает триггер 10 в состояние на выдачу сигнала на перемещение объекта Вперед, этот сигнал снимается при достижении исполнительным элементом позиции 1 по сигналу с датчика 1,.
Аналогичным образом устройство вырабатывает сигналы управления при установке переключателя 2 в любое промежуточное положение.
Конструкция устройства и объем аппаратуры не изменяются при изменении числа рабочих позиций, что делает это устройство универсальным и позволяет использовать его для программированного перемещения практически любых объектов техники.
Устройство обладает высокой помехозащищенностью, так как во время перемещения объекта к логической части устройства всегда подключен только один датчик и срабатывание остальных датчиков (они отключены от схемы) не влияет на его работу, В любом из статических состояний схема
устройства заблокирована сигналом датчика 1 этой позиции.
При первом же переключении .переключателя 2 формируется сигнал соответствующего направления перемещения и объект перемещается до установл нной позиции без остановок в промежуточш: с позициях.
Кроме тогр, устройство обладает большей иадежностыд за счет уменьшения объема об фудования.
Фсчрмула изобретения
1.Устройство для программного управления перемещением исполнительного элемента, содержащее датчики положения исполнительного элемента, подключенные выходами к первым входам программного переключателя, первый выход которого соединен с первыми входами элементов И, отличающее с я тем, что, с целью повышения надежности и помехозащищенности устройства, оно содержит фаэовый дискриминатор и делитель напряжения, подключенный выходами к вторым ВХОДЕШ программного переключат;еля, второй выход которого соединен с входом фазового дискриминатора, подключенного шлходами к вторым входам элементов И.
2.Устройство по п. 1, отличающееся тем, что Фазовый дискриминатор содержит два усилителя,
,подключенные входами через конденса.тор к входу дискриминатора, а выходаNffi - через триггер к выходам дискриминатора.
Источники информации, принятые во внимание при экспертизе
1,Авторское свидетельство СССР 570882, кл. G 05 В 19/08, 1975,
2,Авторское свидетельство СССР 646310, кл. С 05 В 19/04, 1977.
3,. Авторское свидетельство СССР 507859, кл. G 05 В 19/04, 1974 (прототип).
.1
t.
Ч
o
| название | год | авторы | номер документа |
|---|---|---|---|
| Емкостно-электронный преобразователь перемещения | 1989 |
|
SU1721434A1 |
| ФАЗО-ИМПУЛЬСНАЯ СИСТЕМА ЧИСЛОВОГО ПРОГРАММНОГО УПРАВЛЕНИЯ | 1972 |
|
SU424118A1 |
| Устройство для программного управленияпРиВОдОМ CTAHKA | 1979 |
|
SU830312A1 |
| Программное устройство управления | 1984 |
|
SU1264140A1 |
| ЭЛЕКТРОПРИВОД | 2005 |
|
RU2302073C1 |
| Устройство для управления распределенными объектами | 1979 |
|
SU781774A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО ПРОГРАММНОГО УПРАВЛЕНИЯ ПРОЦЕССОМ ВЫПЛАВКИ СТАЛИ И СПЛАВОВ | 1964 |
|
SU165507A1 |
| ЭЛЕКТРОПРИВОД | 2003 |
|
RU2260897C2 |
| Цифровая следящая система | 1980 |
|
SU962845A1 |
| Устройство для программного управления электроприводом | 1980 |
|
SU1198458A1 |
ВпереЗ
Назад
