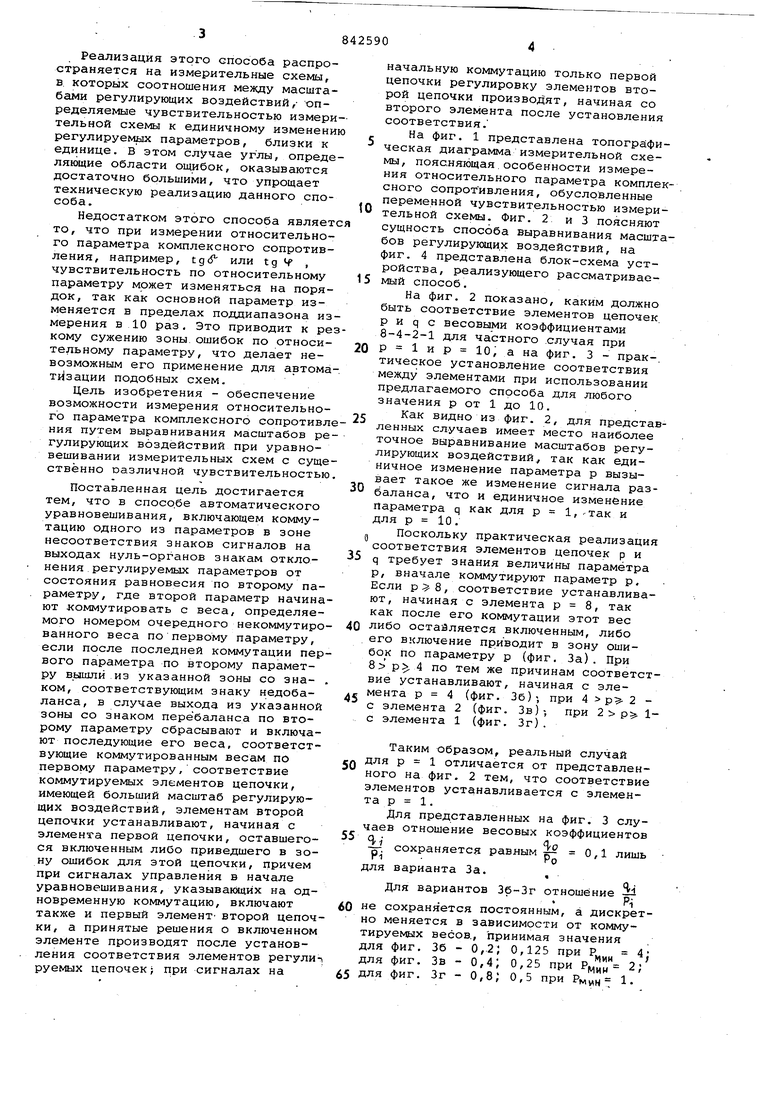
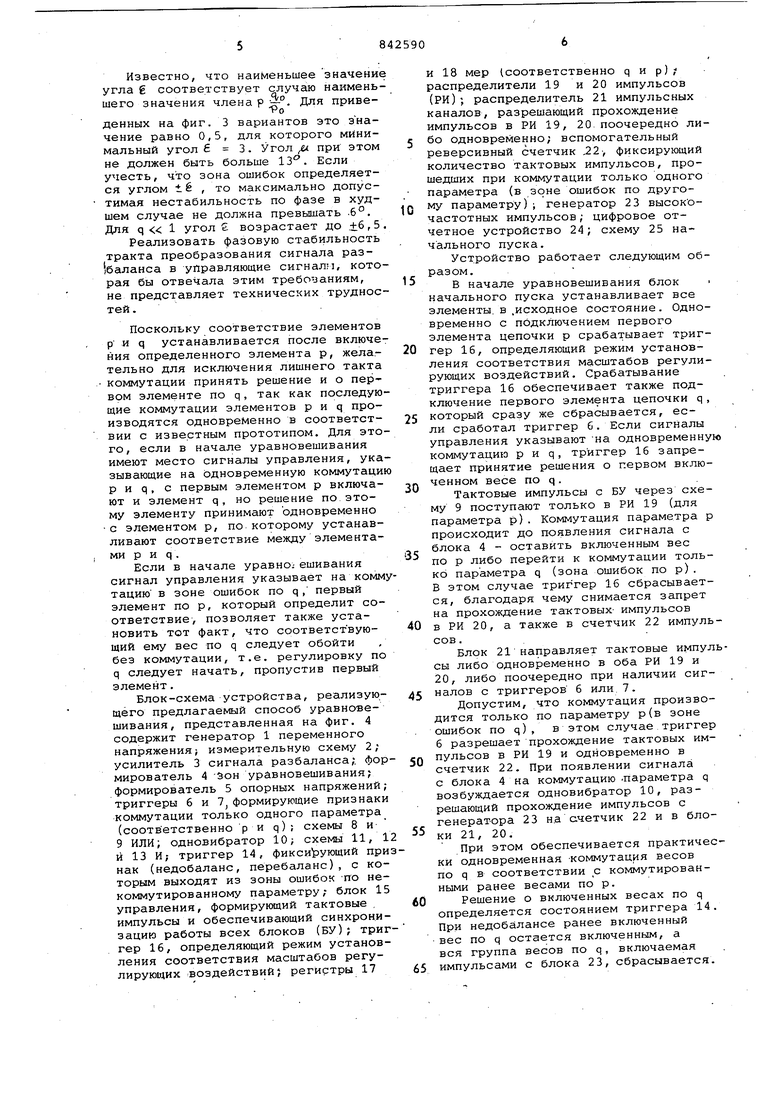
Реализация этого способа распространяется на измерительные схемы, в которых соотношения между масштабами регулирующих воздействий,- определяемые чувствительностью измери тельной схемы к единичному изменени регулируемых параметров, близки к единице. В этом случае углы, опреде ляющие области ощибок, оказываются достаточно большими, что упрощает техническую реализацию данного способа. Недостатком этого способа являет то, что при измерении относительного параметра комплексного сопротивления, например, tgd или tg V , чувствительность по относительному параметру может изменяться на порядок, так как основной параметр изменяется в пределах поддиапазона из мерения в 10 раз. Это приводит к ре кому сужению зоны ошибок по относительному параметру, что делает невозможным его применение для автома тизации подобных схем. Цель изобретения - обеспечение возможности измерения относительного параметра комплексного сопротивл ния путем выравнивания масштабов ре гулирующих воздействий при уравновешивании измерительных схем с суще ственно пазличной чувствительностью Поставленная цель достигается тем, что в способе автоматического уравновешивания, включающем коммутацию одного из параметров в зоне несоответствия знаков сигналов на выходах нуль-органов знакам отклонения регулируемых параметров от состояния равновесия по второму параметру, где второй параметр начина ют коммутировать с веса, определяемого номером очередного некоммутиро ванного веса по первому параметру, если после последней коммутации пер вого параметра по второму параметру вышли из указанной зоны со энаком, соответствующим знаку недобаланса, в случае выхода из указанной зоны со знаком перебаланса по второму параметру сбрасывают и включают последующие его веса, соответствующие коммутированным весам по первому параметру, соответствие коммутируемых элементов цепочки, имеющей больший масштаб регулирующих воздействий, элементам второй цепочки устанавливают, начиная с элемента первой цепочки, оставшегося включенным либо приведшего в зону ошибок для этой цепочки, причем при сигналах управления в начале уравновешивания, указывающих на одновременную коммутацию, включают также и первый элемент- второй цепоч ки, а принятые решения о включенном элементе производят после установления соответствия элементов регули руемых цепочек; при сигналах на начальную коммутацию только первой цепочки регулировку элементов второй цепочки производят, начиная со второго элемента после установления соответствия. На фиг. 1 представлена топографическая диаграмма измерительной схемы, поясняющая особенности измерения относительного параметра комплексного сопротивления, обусловленные переменной чувствительностью измерительной схемы. Фиг. 2 и 3 поясняют сущность способа выравнивания масштабов регулирующих воздействий, на фиг. 4 представлена блок-схема устройства, реализующего рассматриваемый способ. На фиг. 2 показано, каким должно быть соответствие элементов цепочек Р и q с весовыми коэффициентами 8-4-2-1 для частного .случая при р 1 и р 10, а на фиг. 3 - прак-. тическое установление соответствия между элементами при использовании предлагаемого способа для любого значения р от 1 до 10. Как видно из фиг. 2, для представленных случаев имеет место наиболее точное выравнивание масштабов регулирующих воздействий так как единичное изменение параметра р вызывает такое же изменение сигнала разбаланса, что и единичное изменение параметра q как для р 1, -так и для р 10. Поскольку практическая реализация соответствия элементов цепочек р и q требует знания величины параметра р, вначале коммутируют параметр р. Если , соответствие устанавливают, начиная с элемента р 8, так как после его коммутации этот вес либо остайляется включенным, либо его включение приводит в зону ошибок по параметру р (фиг. За). При 8 р 4 по тем же причинам соответствие устанавливают, начиная с элемента р 4 (фиг. Зб); при 4 р 2 с элемента 2 (фиг. Зв); при 2 p5 1с элемента 1 (фиг. Зг). Таким образом, реальный случай для р 1 отличается от представленного на фиг. 2 тем, что соответствие элементов устанавливается с элемента р 1 . Для представленных на фиг. 3 случаев отношение весовых коэффициентов , сохраняется равным - 0,1 лишь для варианта За. , Для вариантов Зб-Зг отношение . Pi не сохраняется постоянным, а дискретно меняется в зависимости от коммутируемых весов., принимая значения для фиг, 36 - 0,2; 0,125 при 4; для фиг. Зв - 0,4; 0,25 при 2; для фиг. Зг - 0,8; 0,5 при РМИН-
Известно, что наименьшее значени угла g соответствует случаю наименьшего значения члена р . Для приведенных на фиг. 3 вариантов это значение равно 0,5, для которого минимальный угол . Угол при этом не должен быть больше 13. Если учесть, что зона ошибок определяется углом 1 , то максимально допустимая нестабильность по фазе в худшем случае не должна превышать .6-. Для q « 1 угол возрастает до .+6,5
Реализовать фазовую стабильность тракта преобразования сигнала разбаланса в управляющие сигналя, которая бы отвечала этим треботзаниям, не представляет технических трудностей .
Поскольку соответствие элементов р и q устанавливается после включения определенного элемента р, жела,тельно для исключения лишнего такта коммутации принять решение и о первом элементе по q, так как последующие коммутации элементов р и q производятся одновременно в соответстВИИ с известным прототипом. Для этого, если в начале уравновешивания имеют место сигналы управления, указывающие на одновременную коммутацию р и q, с первым элементом р включают и элемент q, но решение по этому элементу принимают одновременно с элементом р, по которому устанавливают соответствие между элементами р и q .
Если в начале уравно; ешивания сигнал управления указывает на коммутацию в зоне ошибок по q, первый элемент по р, который определит соответствие, позволяет также установить тот факт, что соответствую1ДИЙ ему вес по q следует обойти без коммутации, т.е. регулировку по q следует начать, пропустив первый элемент.
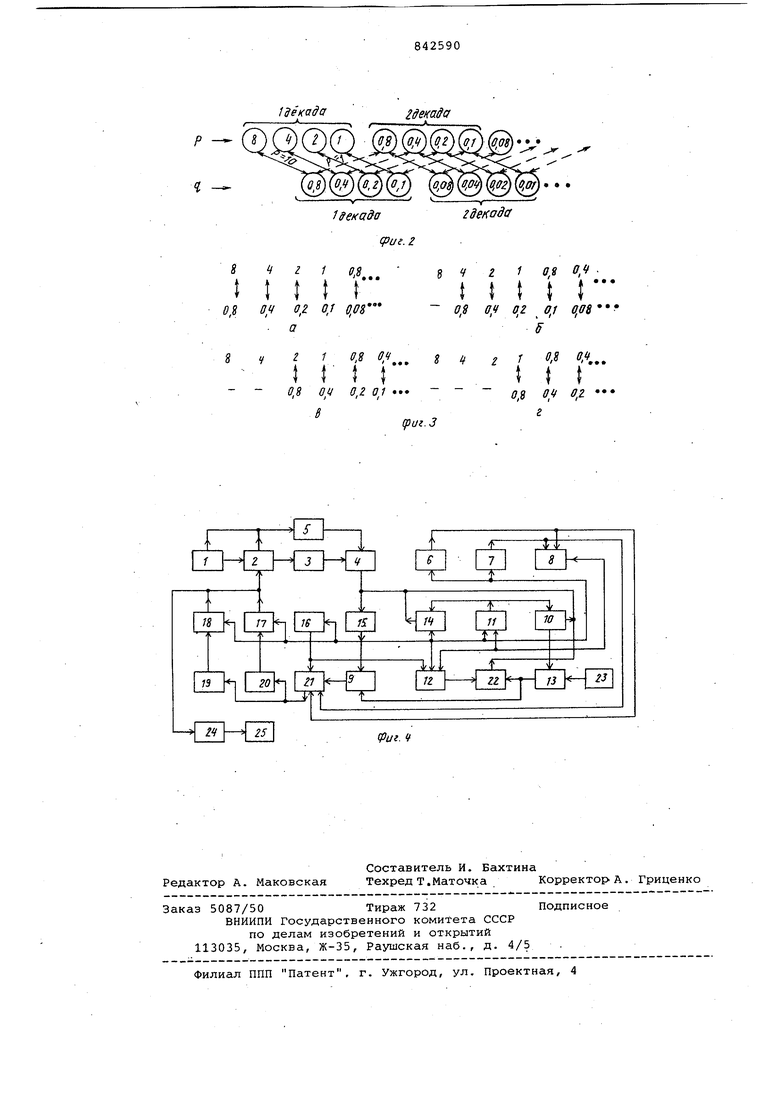
Блок-схема устройства, реализующёго предлагаемый способ уравновешивания, представленная на фиг. 4 содержит генератор 1 переменного напряжения; измерительную схему 2; усилитель 3 сигнала разбаланса;, формирователь 4 -Зон уравновешивания; формирователь 5 опорных напряжений; триггеры 6 и 7j формирующие признаки коммутации только одного параметра (соответственно р и q) ; схемы 8 и9 ИЛИ; одновибратор 10; схемы II, 12 и 13 И; Триггер 14, фиксирующий признак (недобаланс, перебаланс), с которым выходят из зоны ошибок -по некоммутированному параметру; блок 15 управления, формирующий тактовые , импульсы и обеспечивающий синхронизацию работы всех блоков (БУ); триггер 16, определяющий режим установления соответствия масштабов регулирующих воздействий; регистры 17
и 18 мер (соответственно q и р) , распределители 19 и 20 импульсов (РИ) -, распределитель 21 импульсных каналов, разрешающий прохождение импульсов в РИ 19, 20- поочередно либо одновременно; вспомогательный реверсивный счетчик ,22 фиксирующий количество тактовых импульсов, прошедших при коммутации только одного параметра (в зоне ошибок по другому параметру) ; генератор 23 высокочастотных импульсов; цифровое отчетное устройство 24; схему 25 начального пуска.
Уст.ройство работает следующим образом. , ,
В начале уравновешивания блок начального пуска устанавливает все элементы, в .исходное состояние. Одновременно с подключением первого элемента цепочки р срабатывает триггер 16, определяющий режим установления соответствия масштабов регулирующих воздействий. Срабатывание триггера 16 обеспечивает также подключение первого элемента цепочки q который сразу же сбрасывается, если сработал триггер 6. Если сигналы управления указывают на одновременну коммутацию р и q, триггер 16 запрещает принятие решения о первом включенном весе по q.
Тактовые импульсы с БУ через схему 9 поступают только в РИ 19 (для параметра р). Коммутация параметра р происходит до появления сигнала с блока 4 - оставить включенным вес по р либо перейти к коммутации только параметра q (зона ошибок по р) . В этом случае триггер 16 сбрасывается, благодаря чему снимается запрет на прохождение тактовых- импульсов в РИ 20, а также в счетчик 22 импульсов.
Блок 21направляет тактовые импулсы либо одновременно в оба РИ 19 и 20, либо поочередно при наличии сигналов с триггеров 6 или 7.
Допустим, что коммутация производится только по параметру р(в зоне ошибок по q), в этом случае триггер 6 разрешает прохождение тактовых импульсов в РИ 19 и одновременно в счетчик 22. При появлении сигнала с блока 4 на коммутацию .параметра q возбуждается одновибратор 10, разрешающий прохождение импульсов с генератора 23 н.а очетчик 22 и в блоки 21, 20.
При этом обеспечивается практически одновременная -коммутация весов по q в соответствии с коммутированными ранее весами по р.
Решение о включенных весах по q определяется состоянием триггера 14. При недобалансе ранее включенный вес по q остается включенным, а вся группа весов по q, включаемая импульсами с блока 23, сбрасывается. И наоборот, при перебалансе ранее включенный вес по q сбрасывается, а упомянутая группа весов включенной. Аналогичным образом прс изводится и коммутация весов по параметру р, при выходе из зоны, ошибок по р. Внедрение предлагаемого способа автоматического уравновешивания поз воляет сократить число тактов уравновешивания в приборах, измеряющих относительные параметры комплексного сопротивления, доведя их практически также до величины, определяемой числом элементов наибольшей из регулируемых цепочек. Формула изобретения Способ автоматического уравнове,шивания нулевых измерительных схем переменного тока по авт. св. №72951 отличающийся, тем, что, с целью обеспечения возможности измерения относительного параметра ко лексного сопротивления путем выравнивания масштабов регулирующих воздействий при уравновешивании измерительных схем с существенно различной чувствительностью, .соответствие коммутируемых элементов цепочки, имеющей больший масштаб регулирующих воздействий, элементам второй цепочки устанавливают, начиная с элемента первой цепочки, оставшегося включенным, либо приведшего в зону ошибок для этой цепочки, причем при сигналах в начале уравновешивания, указывающих на одновременйую коммутацию элементов обеих цепочек, коммутируют также и первый элемент второй цепочки, а принятие решения о включенном элементе производят после установления соответствия, а при сигналах на начальную коммутацию только первой цепочки регулировку второй цепочки производят после установления соответствия, начиная со второго элемента. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР 175125, кл. G 01 R 17/10, 1963. 2.Авторское свидетельство СССР № 729.517, кл. G 01 R 17/10, .1978.

к Ч
декада
19екада
8 I 10,9
ммГ
0,9 0,4 0,2 0,Г0,08
а
I . 8 о.. г ч г г 0,8 o,f,,
ММ. М t
0,8 0,1 0,2 01
2deKaSci
гдекаЗсг
42 1 0,9 0,4
I М } Г
0, ач о,г 0,1 cfffS
0,8 Otf 0,2.
г (риг.З
