1
В основном авт. св. № 175195 описан способ автоматического уравновешивания нулевых измерительных схем переменного тока. Оба уравновешивающих органа выполнены в виде нереверсивных многоразрядных цепочек образцовых элементов. По этому способу последние переключают по методу взвешивания по знакам сигналов, сформированных фазочувствительными нуль-индикаторами. При соответствии знаков сигналов на выходах нульорганов знакам отклонения регулируемых параметров от состояния равновесия элементы цепочек обоих нуль-органов переключают одновременно. При нарушении соответствия указанных знаков для одного из параметров переключают только э.1ементы цепочек того уравновегиивающего органа, для которого соответстиие знаков сохраняется.
Предложенный способ позволяет сократить время уравновешивания (особенно в тех случаях, когда одна из составляющих измеряемого объекта значительно больше другой) благодаря тому, что уравновешивание начинают с переключения элементов цепочки уравновешивающего органа того параметра, разбаланс по которому больше, а при переходе к уравновешиванию по второму параметру переключения элементов цепочки второго уравновешивающего органа начинают с элемента, весовое значение которого соответствует весовому значению
последнего элемента, подключенного при уравновешивании по первому параметру.
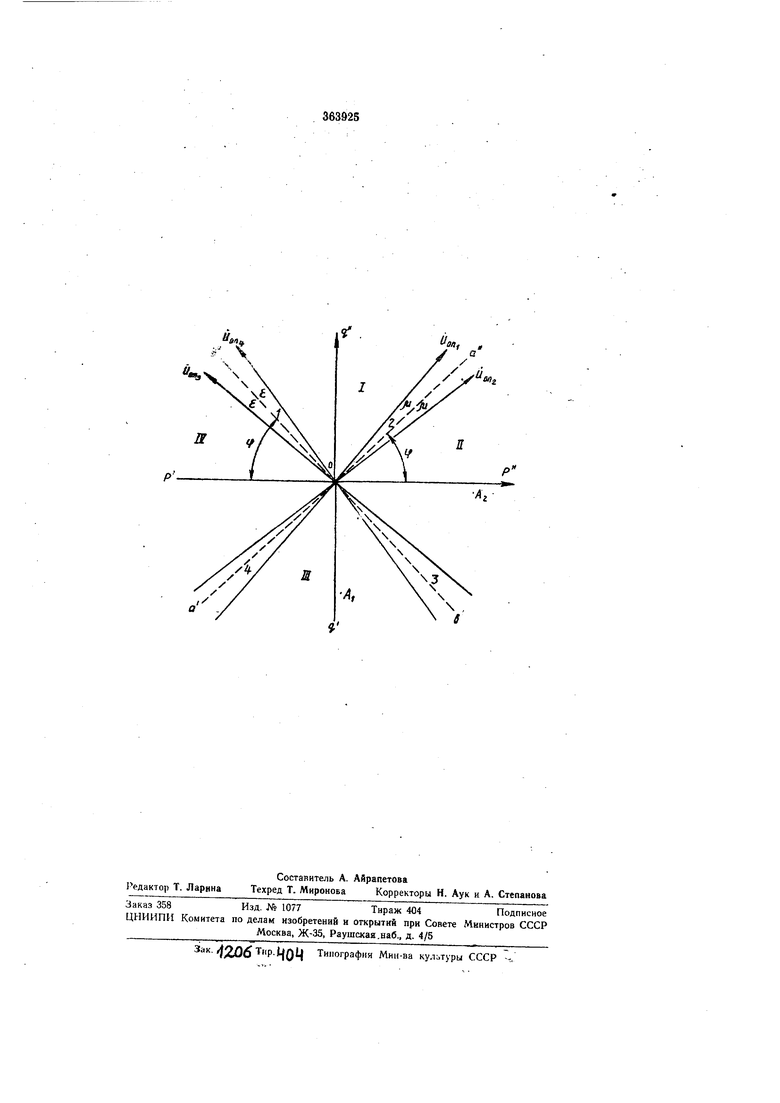
На чертеже представлена топографическая диаграмма, поясняющая особенности предложенного способа.
На диаграмме проведены линии уравновешивания по параметрам р п g - рр и (fg.
В начале уравновешивания векторы опор
ных напряжений oni- фазочувствительных нуль-органов поворачивают на углы, определяемые отношением масштабов .регулирующих воздействий U, и U одинаковых по весовому коэффициенту образцовых элементов цепочек разных уравновешивающих органов. На чертеже показано, положение векторов опорных напряжений после поворота нх на угол ср. определяемый из соотношения
tg
т.
и.
Под масштабом регулирующих воздействий понимается величина разбаланса по соответствующему параметру на единицу дискретности регулирующего органа. При одинаковой величине регулирующих воздействий, т. е. при одинаковых масштабах, угол р 45°.
По знакам сигналов фазочувствительных нуль-органов, которые будут указывать на одновременную коммутацию элементов уравновешивающих органов, определяют большую составляющую измеряемого объекта я начинают переключать элементы цепочки уравновешивающего органа, соответств}ющего этой составляющей. Элементы этой цепочки -коммутир)-к)т нее время, пока знаки сигналов фазочувствительпых н}ль-органов либо не меняются, либо одиоиременно меняются на противоположные. При нарушении указанного соотношения знаков сигналов )1уль-органов производят коммутацию элементов другой цепочки, начина.я с весового значения образцового элемента, соответствующего весовому значению подключенного при отработке предыдущего параметра образдового элемент;. Зоны /-4 обусловлены нестабилыюстями куль-органов, колебаниями частоты питания и т. п. Они включают в себя лнини аа, bb, yi-ол наклона которых относительно линий ypaBHOseHJHBaHiw равен (j, л позволяют исключугть ошибки при уравновешивании, так как уравновеспивание большей составляющей продолл ается до тех пор, пока остаточный сигнал, от осящийся к большему регулнруе юму параметру,: не окажется равным или меньше сигнала, относящегося ко второму регзлируемому параметру. Точность определения указанного момента ограничивается нестабнльностями нуль-органов л характеризуется углами ц и е. Кроме зон I-4 имеются зоны I-IV, в которых соблюдаются определенные соотношения между величинами Up и U мися проекциями вектора и н а соответствующие оси. В зонах I и III всегда ,, а в зонах И и IV JL т. При расположении вектора U в зоне 1П (точка А) отработка начинается с параметра q. Если в процессе отработки параметра q конец вектора напряжения разбаланса попадет в зону 1, то знаки нуль-органов изменяются на противоположные и коммутация элементов цепочки q продолжается. При нарушении указанного соотношения знаков сигналов нуль-органов, например, при попадании конца вектора U в зоны II, 2 или 3, начинается регулировка параметра р, причем первое включаемое весовое значение параметра р соответствует последнему включенному весовому элементу цепочки q, приведшему вектор напряжения разбаланса в одну из названных зон. Если вектор f. оказался в начале уравновешивания в зоне II (точка , уравновешивание начинается с параметра р и ведется аналогичным образом. В обоих случаях после прихода команды на начало отработки второго параметра одновреЯВЛЯЮШ.менно с подключением соответствующего первого элемента второго уравновешивающего органа происходит поворот векторов опорных напряжений в первоначальное положение и уран новешивание ведется известным способом. В случае попадания вектора U ,f в начале процесса уравновешивания в одну из зон 1-4 отработка сразу ведется известным способом. С точки зрения оптимальной чувствительг ности фазочувствительных нуль-органов лучшим является случай, когда /л . В этом случае сигналы разбаланса, вызванные одинаковыми по весовому значению образцовыми эле ментами, находящимися в разных цепочках, равны между собой что обс-спечивает наилучшие )словия для получения мпнималь юй погрешности. При величине т, резко отличающейся от единицы в одну или другую сторону (например, ,, или ), преимущества предлагаемого способа становятся меньше. Таким образоА, в результате использования предлагаемого способа регулиро ния уменьшается время уравновешивания системы благодаря тому, что после начальной отработки большей составляющей измеряемого вектора (4 уравновешивание другой составляющей начинается не с первого образцового элемента, а с того элемента нереверсивной цепочки, который определяется последним включенным элементом первой цепочки, приведшимв одну из зон неопределенности по первому параметру. Минимальное время уравновешивания лрн использованш предлагаемого способа лолучается в том случае, когда одна из составляющих существенно больше другой, а при равенстве нулю одной из составляющих это вре-ми определяется количеством элементов той цепочки, которая используется для уравновешивания другой составляющей умеряемого вектора. Пре1ДЛ1ет изобр ете«И я Способ автоматического уравновешивания нулевых измерительных схем переменного тока по авт. св. ЛЬ 175125, отличающийся тем, что, с целью уменьшения времени уравновешивания, уравновешивание начинают с переключения элементов цепочки уравновешивающего органа того параметра, разбаланс по которому больше, а при 1;реходе к уравновешиванию по второму параметру переключение элементов цепочки второго уравновешивающего органа начин;:ют с элемента, весовое значение которого соответствует весовому значению последнего элемента, подключенного при уравновешивании по первому параметру.
и,
n