Предлагаемый способ относится к электроизмерительной технике, а точнее к способам уравновешивания нулевых измерительных цепей переменного тока, в которых сигналы управления обоими уравновешивающими органами, сформированные из сигнала разбаланса с помощью нуль-органов, зависят от обоих регулируемых параметров. Такие схемы широко применяются при построении цифровых приборов для автоматического измерения составляющих комплексных сопротивлений, напряжений и других электрических величин или неэлектрических, однозначно связанных с электрическими.
Известен способ автоматического уравновешивания нулевых измерительных цепей переменного тока с двумя уравновешивающими органами, выполненными в виде нереверсивных многоразрядных цепочек образцовых элементов, при котором коммутацию элементов каждой цепочки осуществляют по методу взвешивания в соответствии со знаком сигнала, сформированного фазочувствительным нуль-органом, и прекращают, как только величина сдвига фаз между сигналом разбаланса измерительной цепи и опорным напряжением нуль-органа окажется внутри заранее установленных пределов, заключающих в себе область возможного нарушения соответствия между знаком отклонения регулируемого параметра от его равновесного значения и знаком сигнала на выходе фазочувствительного нуль-органа.
Предлагаемый способ позволяет увеличить допустимые фазовые нестабильности в системе автоматического уравновешивания и повысить точность измерения, благодаря тому, что уравновешивание начинают с того параметра, для которого область возможного нарушения соответствия между знаком его отклонения от равновесного значения и знаком сигнала на выходе нуль-органа имеет меньшую величину (если только до начала уравновешивания величина сдвига фаз между сигналом разбаланса и опорным напряжением не находится внутри этой области), параметры регулируют поочередно по сигналам на выходе одного и того же фазочувствительного нуль-органа, фазу опорного напряжения которого устанавливают в соответствии с регулируемым в данный момент параметром.
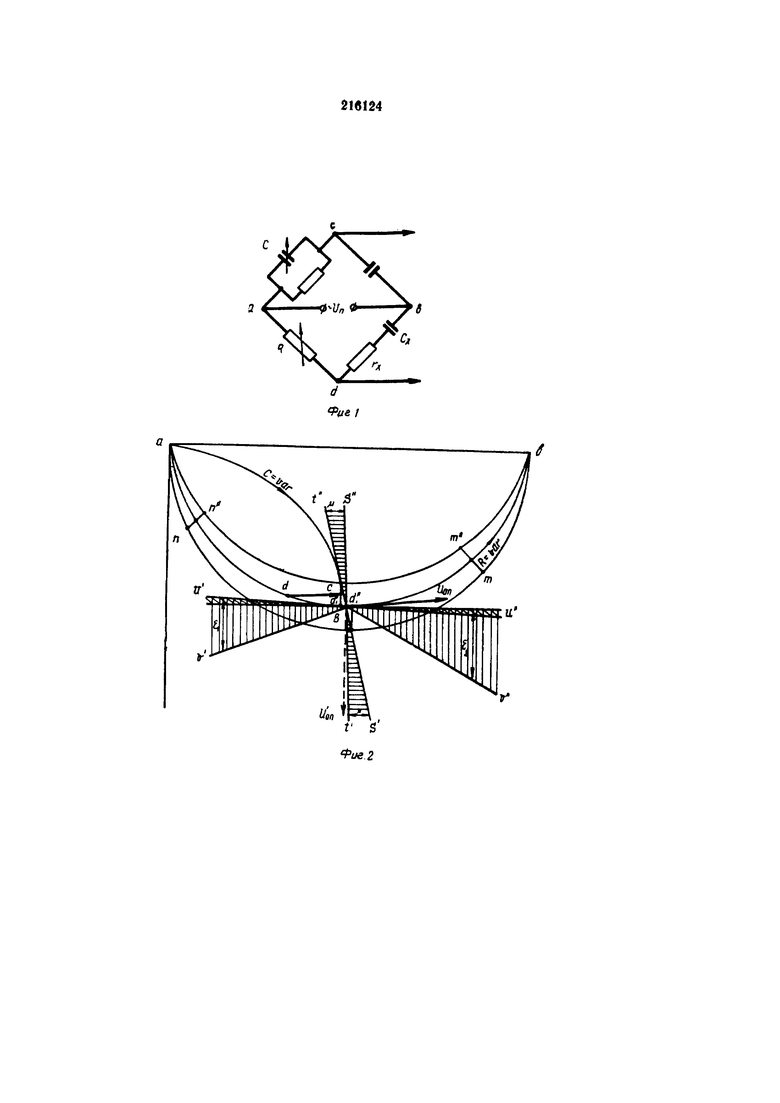
На фиг. 1 изображена мостовая измерительная схема; на фиг. 2 - ее топографическая диаграмма, поясняющая способ. Мостовую измерительную схему, вершины которой обозначены а, b, с, d уравновешивают с помощью двух уравновешивающих органов, выполненных в виде многоразрядных нереверсивных цепочек образцовых элементов R и С, набранных в каждом разряде по какому-либо самодополняющемуся коду, например 2, 4, 2, 1.
На топографической диаграмме выделена область уравновешивания nn′′m′′m, внутри которой может находиться потенциальная точка d, соответствующая вершине моста d при изменении регулируемого параметра R и измеряемых величин Сx и rx во всем диапазоне измерения. Потенциальная точка с, соответствующая вершине моста с, всегда находится на окружности C=var. В результате процесса уравновешивания регулировкой параметров С и R потенциальные точки c и d на диаграмме должны быть совмещены в точке пересечения окружностей уравновешивания C=var и R=var, например, в точке В. На этой же диаграмме штриховкой выделены минимальные области возможного несоответствия знаков отклонений регулируемых параметров С и R от их равновесных значений знакам сигналов управления или минимальные зоны возможных ошибок. Ошибка при регулировке параметра R, возникающая в результате нарушения соответствия между знаком отклонения параметра R от его равновесного значения (знаком ΔR) и знаком сигнала на выходе фазочувствительного нуль-органа, может иметь место, если фазовый угол сигнала разбаланса моста (вектора dc) будет находиться в пределах углов: ∠t′′BS′′ и ∠t′′BS′ (угол µ).
Ошибка при регулировке параметра С может иметь место, если фазовый угол сигнала разбаланса моста будет находиться в пределах углов ∠U′Bν′ и ∠U′′Bν′′, выделенных полупрямыми U′B и ν′B (угол ε1) и полупрямыми U′′B и ν′′B (угол ε2). О попадании в область возможных ошибок по каждому регулируемому параметру судят по величине φ фазового сдвига сигнала разбаланса моста относительно опорного напряжения нуль-органа, учитывая максимально возможную фазовую нестабильность ±ψm органов сравнения. Так, если опорное напряжение квадратурного фазочувствительного нуль-органа  установлено на отработку R, т.е. направлено по биссектрисе угла ∠S′′Bt′, то при значениях φ, удовлетворяющих неравенствам
установлено на отработку R, т.е. направлено по биссектрисе угла ∠S′′Bt′, то при значениях φ, удовлетворяющих неравенствам  или
или  нельзя производить регулировку параметра R.
нельзя производить регулировку параметра R.
Устройство для осуществления данного способа должно иметь индикатор попадания вектора напряжения разбаланса в область возможных ошибок. Уставки индикатора, соответствующие граничным значениям областей возможных ошибок, делают применительно к регулировке параметра, у которого эти области имеют наименьшее значение. В рассматриваемом примере меньшая область ошибок имеет место при регулировке параметра R (угол µ, гораздо меньше углов ε1 и ε2).
Следовательно, уставки индикатора области возможных ошибок выбираются применительно к величине µ с учетом величины угла φm. До начала уравновешивания фазу опорного напряжения  квадратурного фазочувствительного нуль-органа устанавливают применительно к регулировке параметра с меньшей областью возможной ошибки, т.е. также применительно к регулировке параметра R. Если уже до начала уравновешивания фаза сигнала разбаланса не окажется в пределах, внутри которых запрещается регулировка R, т.е. индикатор области возможных ошибок не выдаст сигнала о попадании в данную, область, то производится регулировка параметра R. Образцовые элементы цепочки поочередно коммутируются по методу взвешивания в соответствии со знаком сигнала на выходе фазочувствительного нуль-органа. Регулировку продолжают до попадания в установленные пределы области возможных ошибок при регулировке параметра R, на что укажет сигнал на выходе индикатора области возможных ошибок. При этом окончательную коммутацию образцового элемента цепочки R не производят. Фазу опорного напряжения фазочувствительного нуль-органа устанавливают применительно к регулировке параметра С в данном случае по биссектрисе угла ∠U′BV′′ - вектор
квадратурного фазочувствительного нуль-органа устанавливают применительно к регулировке параметра с меньшей областью возможной ошибки, т.е. также применительно к регулировке параметра R. Если уже до начала уравновешивания фаза сигнала разбаланса не окажется в пределах, внутри которых запрещается регулировка R, т.е. индикатор области возможных ошибок не выдаст сигнала о попадании в данную, область, то производится регулировка параметра R. Образцовые элементы цепочки поочередно коммутируются по методу взвешивания в соответствии со знаком сигнала на выходе фазочувствительного нуль-органа. Регулировку продолжают до попадания в установленные пределы области возможных ошибок при регулировке параметра R, на что укажет сигнал на выходе индикатора области возможных ошибок. При этом окончательную коммутацию образцового элемента цепочки R не производят. Фазу опорного напряжения фазочувствительного нуль-органа устанавливают применительно к регулировке параметра С в данном случае по биссектрисе угла ∠U′BV′′ - вектор  Величины установленных пределов зон возможных ошибок не изменяются - теперь просто эти углы отсчитываются от заново установленного опорного напряжения того же нуль-органа. Это осуществимо, поскольку после первой регулировки параметра R потенциальная точка d достаточно приблизится к точке равновесия В, т.е. попадет внутрь отрезка
Величины установленных пределов зон возможных ошибок не изменяются - теперь просто эти углы отсчитываются от заново установленного опорного напряжения того же нуль-органа. Это осуществимо, поскольку после первой регулировки параметра R потенциальная точка d достаточно приблизится к точке равновесия В, т.е. попадет внутрь отрезка  , а следовательно, область возможных ошибок при регулировке параметра С наверняка сузится до области, не превосходящей дважды заштрихованной на топографической диаграмме, которая меньше области возможных ошибок при регулировке параметра R. Так что установленные пределы области возможных ошибок при регулировке параметра R будут охватывать суженую область возможных ошибок при регулировке параметра С. Затем производят коммутацию образцовых элементов цепочки С по методу взвешивания по знаку сигнала на выходе того же фазочувствительного нуль-органа до попадания в установленные пределы области возможных ошибок, после чего снова изменяют фазу опорного напряжения применительно к регулировке параметра R и производят коммутацию образцовых элементов цепочки R и т.д. Такой процесс поочередной коммутации элементов цепочек продолжают до тех пор, пока схема не будет уравновешена или пока не будут перебраны все элементы каждой цепочки.
, а следовательно, область возможных ошибок при регулировке параметра С наверняка сузится до области, не превосходящей дважды заштрихованной на топографической диаграмме, которая меньше области возможных ошибок при регулировке параметра R. Так что установленные пределы области возможных ошибок при регулировке параметра R будут охватывать суженую область возможных ошибок при регулировке параметра С. Затем производят коммутацию образцовых элементов цепочки С по методу взвешивания по знаку сигнала на выходе того же фазочувствительного нуль-органа до попадания в установленные пределы области возможных ошибок, после чего снова изменяют фазу опорного напряжения применительно к регулировке параметра R и производят коммутацию образцовых элементов цепочки R и т.д. Такой процесс поочередной коммутации элементов цепочек продолжают до тех пор, пока схема не будет уравновешена или пока не будут перебраны все элементы каждой цепочки.
Сходимость процесса уравновешивания обеспечена, поскольку решение об окончательной коммутации каждого элемента принимается лишь в областях, в которых знак сигнала на выходе нуль-органа соответствует знаку отклонения регулируемого параметра от его равновесного значения. Число тактов уравновешивания равно сумме образцовых элементов обеих цепочек.
Так как при данном способе уставки индикатора области возможных ошибок выбирают применительно к регулировке параметра с меньшей областью возможных ошибок, сходимость обеспечивается при больших фазовых нестабильностях в усилителе, чем это имеет место при других способах координированного взвешивания. Это позволяет снизить требования к усилителю сигнала разбаланса. Эффективность способа тем больше, чем больше разнятся зоны возможных ошибок по каждому регулируемому параметру.
Способ автоматического уравновешивания нулевых измерительных цепей переменного тока с двумя уравновешивающими органами, выполненными в виде нереверсивных многоразрядных цепочек образцовых элементов, при котором коммутацию элементов каждой цепочки осуществляют по методу взвешивания в соответствии со знаком сигнала, сформированного фазочувствительным нуль-органом, и прекращают, как только величина сдвига фаз между сигналом разбаланса измерительной цепи и опорным напряжением нуль-органа окажется внутри заранее установленных пределов, заключающих в себе. область возможного нарушения соответствия между знаком отклонения регулируемого параметра от его равновесного значения и знаком сигнала на выходе фазочувствительного нуль-органа, отличающийся тем, что, с целью увеличения допустимых фазовых нестабильностей в системе автоматического уравновешивания и повышения точности измерения, уравновешивание начинают с регулировки того параметра, для которого область возможного нарушения соответствия между знаком его отклонения от равновесного значения и знаком сигнала на выходе нуль-органа имеет меньшую величину (если только до начала уравновешивания величина сдвига фаз между сигналом разбаланса и опорным напряжением не находится внутри этой области), параметры регулируют поочередно по сигналам на выходе одного и того же фазочувствительного нуль-органа, фазу опорного напряжения которого устанавливают в соответствии с регулируемым в данный момент параметром.
