(54) УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ ОБЪЕКТОМ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования расхода жидкости | 1984 |
|
SU1236434A2 |
| Программное регулирующее устройство | 1979 |
|
SU847277A1 |
| Устройство для программного регулирования инерционных процессов | 1980 |
|
SU954969A1 |
| Устройство для автоматическогоРЕгулиРОВАНия чАСТОТы и АКТиВНОйМОщНОСТи эНЕРгООб'ЕдиНЕНия | 1979 |
|
SU845221A2 |
| Цифровая следящая система | 1980 |
|
SU934446A1 |
| Система регулирования факторов внешней среды для оптимизации фотосинтеза растений | 1975 |
|
SU535921A1 |
| Многоканальный регулятор тепловых процессов (его варианты) | 1980 |
|
SU943667A1 |
| Устройство для регулирования расхода жидкости | 1983 |
|
SU1158979A1 |
| Устройство для программного регулирования температуры | 1987 |
|
SU1566320A2 |
| Устройство телемеханики | 1984 |
|
SU1241274A1 |
Изобретение относится к автоматике и вычислительной технике, в частности к системам программного управл ния.. Известно устройство для программного управления, содержащее соединенные последовательноблок задания программы, реверсивный счетчик, цифроаналоговый преобразователь, блок усилителей, исполнительный механизм и Датчик импульсов, выход которого подключен ко второму входу реверсивного счетчика П. Б известном устройстве используется равномерное квантование .управляющего сигнала по уровню. Точность устройства и число уровней квантования управляющего сигнала определяются разрядностью реверсивного счетчика. При небольшой разря:дности реверсивного счетчика невозможно получить высокую точность устройства рля программного управления. Наиболее близким техническим решением к предлагаемому является устройство для программного управления, которое содержит датчик состояния объекта, задатчик состояния объекта, устройство сравнения, усилитель, первое реле, второе реле, двигатель, программное реле с контактами сброса, исполнительное устройство Г21. Однако это устройство не устраняет значительную установившуюся ошибку, возникающую вследствие инерционности системы программного управления, для одного из направлений движения двигателя. Цель изобретения - повьшение точности устройства. Поставленная цель достигается тем, что устройство для программного управления объектом, содержащее компаратор, входы которого подключены к выходам датчика и задатчика состояния объекта, первый выход через последовательно соединенные блок управ. 3
ления, переключатель направления, группу управляющих реле и двигатель ко входу исполнительного механизма, введены последовательно соединенные формироваталь управляющего кода, блок йиротно-импульсной модуляции и элемент ИЛИ, выход которого подк11ючен ко второму входу переключателя направления, а вход формирователя управляющего кода соединен со вторым выходом компаратора, и тем, что формирователь управляющего кода содержит последовательно соединенные задатчик параметров, вычислитель уровней квантования,блок алгебраического суммирования, блок определения знака, блок элементов И-НЕ и блок элементов И, второй вход которого соединен с выходом генератора импульсов, а выходы с выходами формирователя, третий вход блока элементов И подключен кодному из выходов блока определения знака через элемент НЕ, а второй вход блока алгебраического суммирования соединен со входом фopмиt oвaтeля.
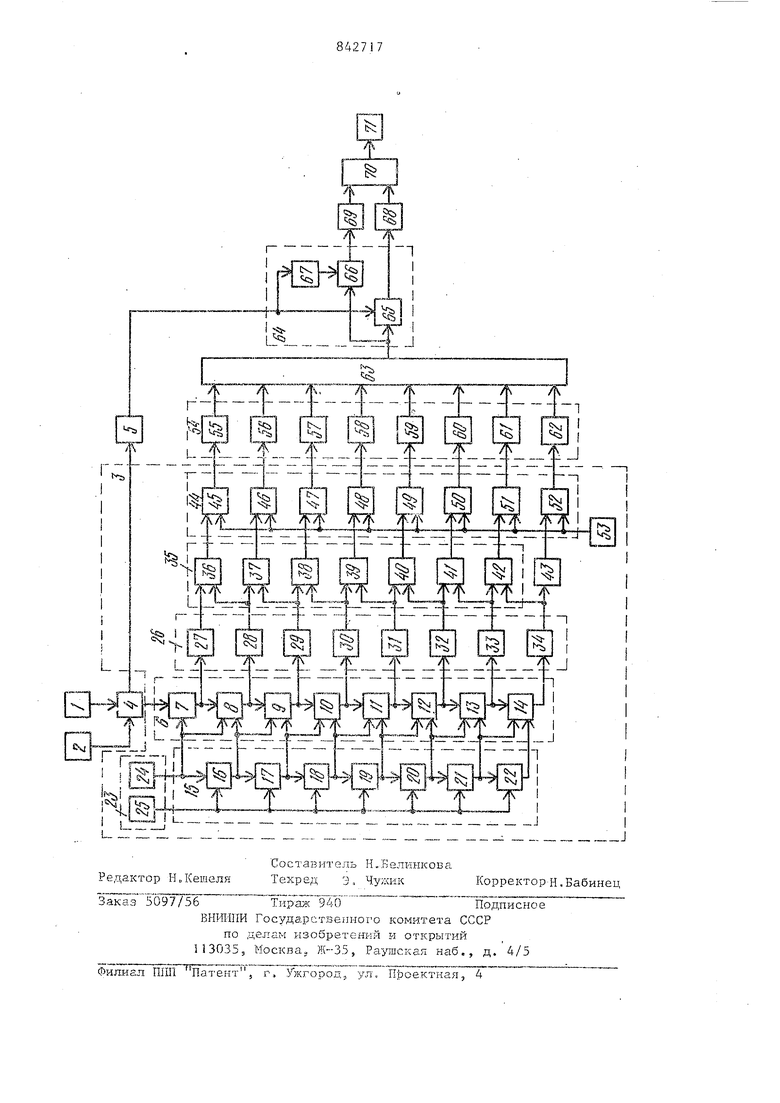
На чертеже представлена блоксхема устройства.
Устройство для программного управления объектом содержит датчик 1 состояния объекта, задатчик 2 соетояния объекта, формирователь 3 управляющего кода, компаратор 4j блок 5 управления, блок 6 алгебраического суммирования, состоящий из элементов /7-14 алгебраическогб суммирования, вычислитель 15 уровней квантования, состоящий из блоков 16-22 умножения, задатчик 23 параметров, состоящий из блока 24 задания минимальной длительности управляющего сигнала и блока 25 задания шага квантования, блок 26 определения знака, состоящий из элементов 27-34 сравнения, блок 35 э:1ементов И-НЕ 3642, элемент-НЕ 43, блок 44элементов И 45-52, генератор 53 импульсов, блок 54 щирокоимп льсной модуляции, состоящий из одновибратлров 55-62, элемент ИЛИ 63, переключатель 64 направления, элементы И 65 и 66, элемент НЕ 67, реле 68 и 69, двйга тель 70 и исполнительный механизм 71.
Устройство работает следующим образом., V
Сигналы от датчика 1 и задатчика 2 поступают в компаратор 4, где вычисляется приращение управляющего воздействия и определяется знак приращения управляющего воздействия.
174
который в виде знакового разряда в управляющем коде на выходе компаратора 3 поступает на вход блока 5. Абсолютная величина приращения управляющего воздействия сравнивается в блоке 6 с уровнями квантования, рассчитываемыми в вычислителе 15. Для вычисления уровней квантования используются настроечные параметры, поступающие иа вход вычислителя 15 из блока 24 задания минимальной длительности управляющего сигнала и блока 25 задания шага квантования. Первый шаг квантования равен величине, задаваемой блоком 24, второй и последующие шаги квантования.образуются путем умножения предьздущего шага на величину, задаваемую блоком 25,
В блоке26 определяются знаки величин, получаемых на выходе элементов 7-14. При этом в элементе 7 определяется разность между абсолютной величиной приращения управляю -щего воздействия, получаемой из компаратора 4, и выходной величиной блока 24. В последующих элементах 814 определяется разность между вьгходным сигналом предьщущего элемента алгебраического суммирования и суммой сигналов со входа и.с выхода соответствующих блоков 16-22.
Код на выходе блока 26,- пройдя через блок 25, содержащий элементы 36-42, и элемент НЕ 43, преобразуется в код, содержащий 1 только в одном разряде. Это достигается подачей на входы каждого из элемеитов 36-42 выходных сигналов с двух соседних элементов 27-34. Сигнал с выхода элемента 34, кроме того, поступает на вход элемента НЕ 43. Полученный код, пройдя через блок 44, состоящий из элементов И 45-52, по сигналу генератора 53 поступает на вход блока 54 и запускает один из одновибраторов 55-62, входящих
в этот блок.
В блоке 54 осуществляется широтноимпульсная модуляция управляющего сигнала. При этом длительность управляющего сигнала квантуется по уровню с неравномерным шагом. Количество уровней квантования равно числу одновибраторов 55-62 в блоке 54 и может меняться в зависимости от требуемой точности устройства.
Выходные сигналы блока 54 через элемент ИЛИ 63 поступают на первый
вход переключателя 64, который с помощью входящих в него элементов И 6, 66 и элемента НЕ 67 в зависимости от знака приращения управляющего воздействия , поступающего с выхода блока 5, включает одно из двух реле 68 или .69...Приращение управляющего воздействия, преобразованное в длительность замьшания контактов реле 68 и 69, интегрируется на двигателе 70 и полное значение управляющего сигнала поступает на исполнительный механизм 71.
Испытания показьшают, что установившаяся ошибка системы программного упрарления, построенной с использованием предлагаемого устройства, может быть уменьшена на 0,1% от полного диапазона изменения выходного сигнала объекта, независимо от .направления изменения .сигнала задатчика состояния объекта.
Формула изобретения
0 кода соединен со звторым выходом компаратора.
0 И, второй вход которого соединен с . выходом генератора импульсов, а выходъг - с выходами формирователя, третий вхоД блока элементов И подключен -к одному из выходов блока
5 определения знака через элемент НЕ , а второй вход блока алгебраического суммирования,бедийен со входом формирователя.
Источники информации,
0 принятые во внимание при экспертизе
