(54) ЦИФРОВАЯ СЛЕДЯЩАЯ СИСТЕМА
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровая следящая система управленияпЕРЕМЕщЕНиЕМ Об'ЕКТА | 1979 |
|
SU798726A1 |
| Система управления многоканальнымэлЕКТРОпРиВОдОМ РОбОТА | 1979 |
|
SU805246A1 |
| Число-импульсный следящий электропривод | 1983 |
|
SU1233099A1 |
| Устройство для регулирования расхода жидкости | 1981 |
|
SU999025A1 |
| Число-импульсный следящий электропривод | 1983 |
|
SU1124256A1 |
| Цифровая следящая система регулирования | 1976 |
|
SU673986A1 |
| Устройство для сварки | 1987 |
|
SU1479225A1 |
| Устройство для регулирования расхода жидкости | 1984 |
|
SU1236434A2 |
| СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ СБОРОЧНЫМ УСТРОЙСТВОМ | 1991 |
|
RU2029335C1 |
| Фотоэлектрическая следящая система гидирования телескопа | 1984 |
|
SU1228068A1 |
1
Изобретение относится к автоматическому управлению и может быть использовано в устройствах позиционирования станков с программным управлением, прецизионных фотограмметрических устройствах и лазерных фотопостроител51х.
Известна цифровая следящая система управления перемещением, в которой физическое перемещение объекта фиксирует ся при помощи информации реверсивного счетчика. Система содержит реверсивный счетчик, операционный усилитель, преобразователь скорости перемещения объекта в постоянное напряжение, формирователь управляющего сигнала с усилителем мощности, исполнительное устройство, и частотный датчик l .
Недостатком системы является понижв l oe быстродействие.
Наиболее близкой к предлагаемой по технической сущности является цифровая следящая система, содержащая последовательно соединенные усилитель, исполнительное устройство, объект управления
Я частотный датчик перемещения, три форумирователя импульсов, выходы которых соединены со входами усилителя, два реверс1шных счетчика, информационные выходы разрядов которых соединены с н вторым преобразователями код - частота, выходы преобразователей кодчастота соединены со входами первого и второго формирователей импульсов, а вход третьего формирователя подключен к импульсному выходу частотного датчика перемещения, входы первого в второго реверсивных счетчиков соединены с выходами соответственно первого и второго число-импульсных сумматоров, входы первого импульсного сумматора подключены ко входам блока, задающего величину перемещения объекта, и частотного датчика величины перемшцения объекта, а входы второго - к выходам частотного датчика перемещения и логического Узла, подвшюченного входами к первому преобразователю код-частота в знаковому разряду первого реверсивного счегчика|.2.
Недостатком такой системы является ограниченное быстродействие, вызванное тем, что коэффициент обратной связи по скорости во время позиционирования остается неизменным.
Цель изобретения - повышение быстродействия системы.
Указанная цель достигается тем, что цифровая следящая система, содержащая первый и второй блоки алгебраического суммирования, первый и второй преобразователи код - частота, выходы которых подключены к импульсным входам первого и второго формирователей импульсов соответственно и третий формирователь импульсов, выход каждого из формирователей импульсов подключен к соответствующему входу усилителя, выход которого через исполнительный механизм соединен со входом объекта управления, вход которого подключен ко входу дат чика перемещений, информационный выход второго блока алгебраического суммирования соединен с входом второго преобразователя код - частота, содержит также делитель частоты, дешифратор и шифратор, вход которого подключен ко входу дешифратора и к информационному выходу первого блока алгебраического суммирования, знаковый выход которого соединен с управляющими входами второго блока алгебраического cy -; tиpoвaни и первого формирователя импульсов, а управляющий и счетный входы - с знаковым и импульсным выходами датчика перемещения соответственно, выход шифратора соединен со входом первого преобразователя код - частота, выход которого подключен к счетному входу второго блока алгебраического суммирования, вход установки в ноль которого соединен с одним выходом дешифратора, другой выход которого подключен к управляющему входу делителя частоты, имрульсный вход которого соединен с импульЬным выходом датчика перемещений, а импульсный выход - с импульсным входом третьего формирователя импульсов, управляющий вход которого подключен к знаковому выходу датчика перемещений, знаковый выход второго блока алгебраического измерения соединен с управляющим входом второго формирователя импульсов.
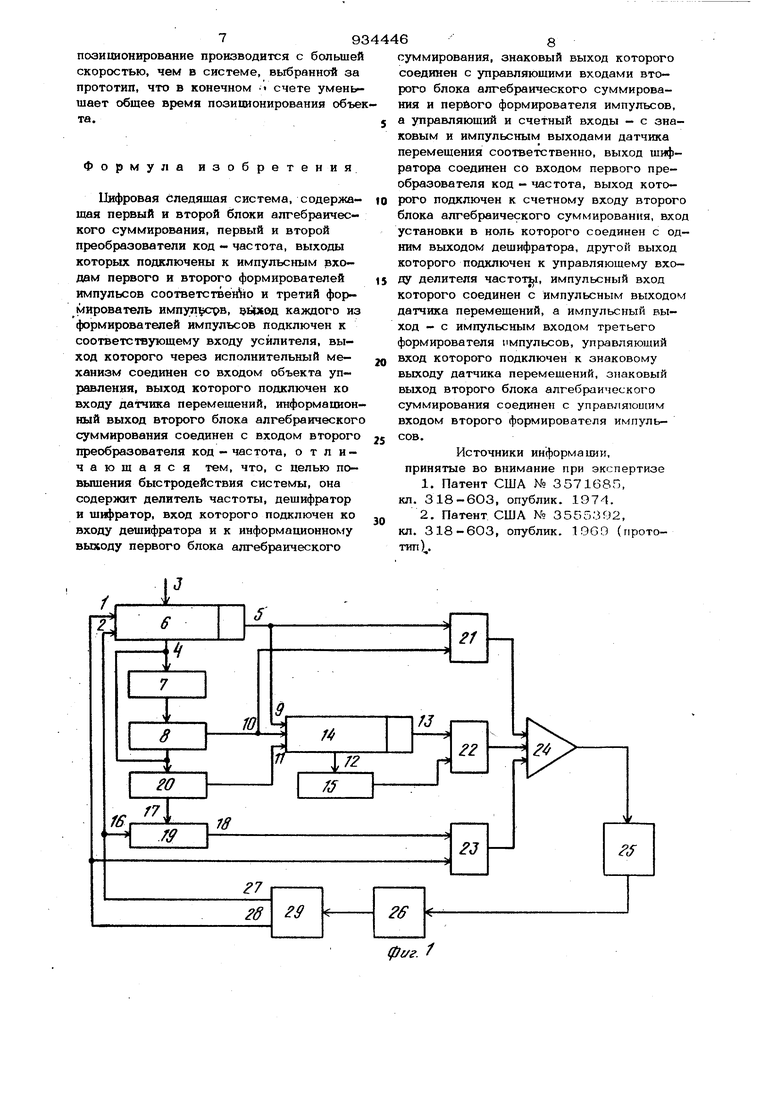
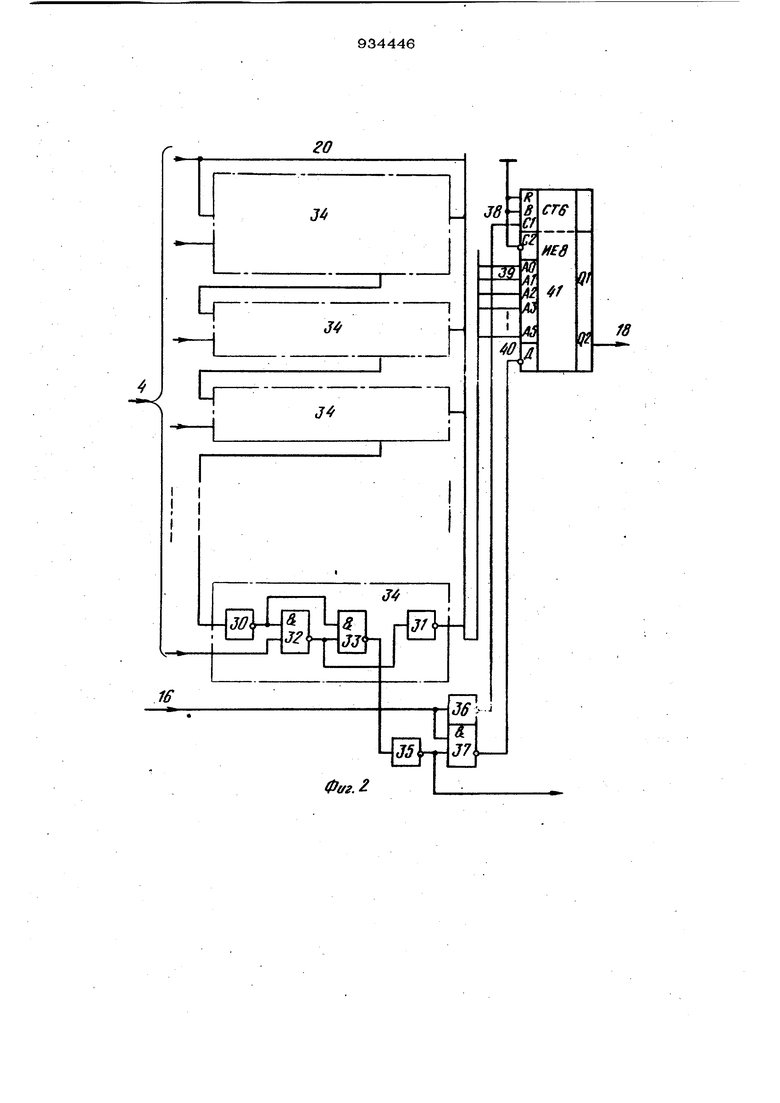
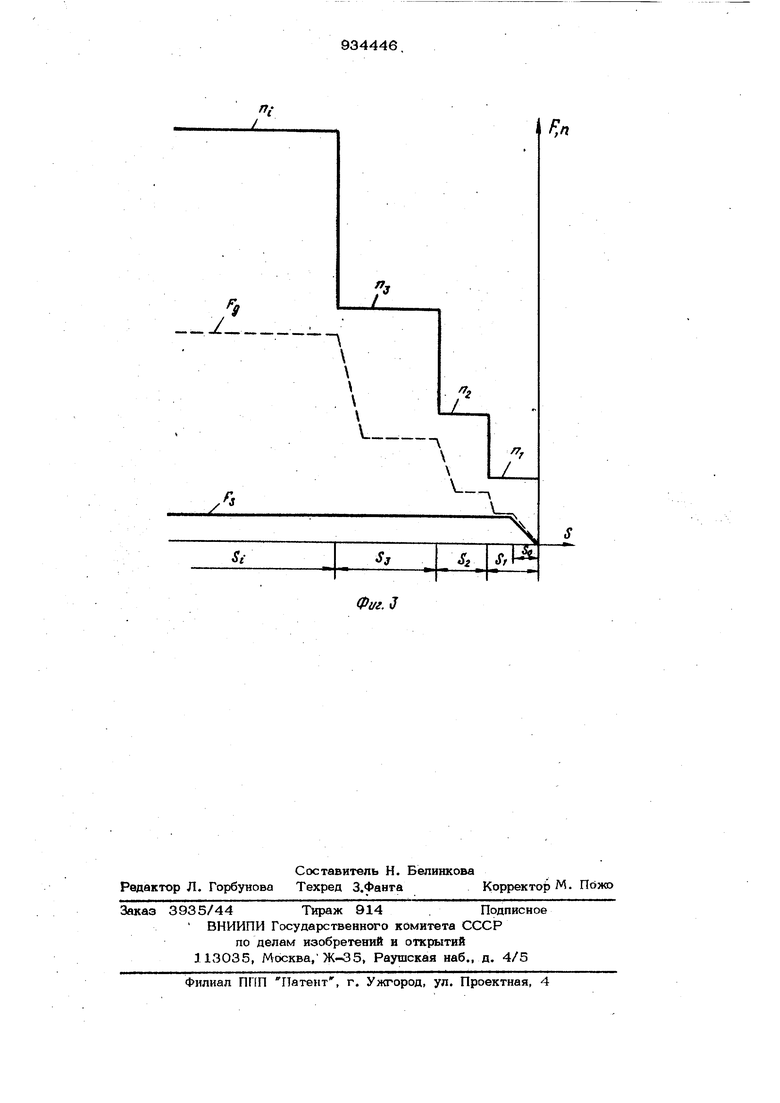
На фиг. 1 приведена функциональная схема системы; на фиг. 2 - схема дешифратора и делителя частоты ;. на фир. 3диаграммы, поясняющие принцип работы системы.
Шфровая следящая система содержит управляющий 1, счетный 2, информационный 3 входы, информационный 4 и знаковый выход 5 первого блока алгебраического суммирования, первый блок 6 алгебраического суммирования, шифратор 7, первый преобразователь 8 код-частота, управляющий 9, счетный Ю, установки в нулевое состояние 11 входы, и информационный 12 и знаковый 13 выходы второго блока алгебраического суммиро-i вания, второй блок 14 алгебраического суммирования, второй преобразователь 15 код-частота, импульсный 16, управляющий 17 вхоаы и импульсный 18 выход делителя частоты, целитель 19 частоты, дешифратор 2О, первый 21, второй 22 и третий 23 формирователи импульсов, усилитель 24, исполнительный механиз
25, объект 26 управления, импульсный . 27 и знаковый 28 выходы частотного датчика, частотный датчик 29, первый и второй элементы И-НЕ 32 и 33, логические узлы 34, третий и четвертый
инверторы 35 и 36, элемент ИЛИ-НЕ 37, счетный 38,,управляющие 39 и суммирующие 40 входы счетчика 41, рассогласование в системе S частоты на импульсных въисодах .преобразователя 8 и
датчика 29 F и FQ. . коэффициент деления делителя 19 и .
Система работает следующим образом. Величина рассогласования в прямом позиционном коде со знаком плюс или минус со входов 3 заносится в блок 6. Значение рассогласования S преобразуется с помощью преобразователя 8 в частоту следования импульсов Fg , пропорциональную коду числа, формируемому шифратором 7. Как видно из фиг. 3, преобразователь 8 обеспечивает линейное изменение частот в пределах некоторой малой зоны рассогласования 5о Вне этой зоны обеспечивается постоянство частоты Fg . Последовательность импульсов с частотой Fg и знаковый сигнал с выхода 5 блока 6 поступает на формирователь 21, вырабатывающий импульсы постоянной длительности и амплитуды, причем знак амплитуды соответствует знаку величины рассогласования. Эти импульсы поступают на вход усилителя 24, который пpeoбpaзyeт иx в сигнал управления механизмом 25, который приводит в движение объект 26 и закрепленкый на нем датчик 29 в таком направлении, при котором значение рассогласования,, формируемое блоком 6, стремится к нулю. Если значение рассогласования превышает зону S . на вход усилителя поступает от формирователя 23 частота, пропорциональная скорости движения объе та 26. Частота на выходе формирователя 22 при этом равна нулю, так как до тех пор пока объект 26 не переместится в зону 5 на входе 11 блока 14 дешифратор 20 поддерживает сигнал, удерживающий триггеры счетчика в нулевом, состоянии. Во время позиционирования дешифратор 20 определяет зону (где 7 1,, 2, 3, ...), в которой находится объект позиционирования. Значение каждой зоны, начиная со второй, может быт определено из выражения 5,-()5,-,(.1) где В - основание выбранной системы счисления. Если ошибка рассогласования превышает зону 5i . на УП-НЫХ выходах дешифратора имеется только один разрешаю щий сигнал, который поступает на один из управляющих входов счетчика 41. На вход 38 этого элемента поступает через инвертор 36 частота датчика 29. Для каждой из зон дешифратор 2О устанавливает вполне определенный коэффициент деления частоты датчика 29. Значение . этого коэффициента для зоны ч (где i 2, 3, 4, ...) равно (2) Поскольку следящая система при рас.согласовании, превышающем зону , яв ляется системой с пропорционально-дифференциальным управлением, р установившемся ре-жиме значения частот на выходе формирователей 21 и 23 должны быть равны. (Это означает, что при движении в зоне 5ч , где l7/2j реальная скорость объекта будет в больше, чем максимальная скорость перемещения внутри зоны 9 , где коэффициент деления частоты датчика принят за единицу. На фиг. 3 этой скорости соответствуе частота Рл. на выходе 27 датчика 29. В момент, когда объект управления , входит в зону 5-J , На входах 39 счетчик 41 будут запрещающие потенциалы, при этом разрешающий потенциал на выходе инвертора 35 разрешает поступление им- пульсов датчика через элемент И-НЕ 37 на вход- 4О счетчика 41. Следовательно, на выходе 18 элемента 40 присутствуют все импульсы датчика перемещения объек та. Сигнал на выходе 11 дешифр)атор)а 20 разрешает Чакжо счот импульсов преобразователя 8 блоко г 14. При этом на вход формирователя 22 начинают посту- пать импульсы, частота которых пропорциональна интегральной составляюшей ошибки рассогласования. Знак амплитуды импульсов на выходе формирователя 22. определяет знаковый разряд блока 14. В зоне S система 5шляется системой с интегральным управлением, в которой управляющий сигнал на исполнительном устройстве пропорпионален алгебраической сумме ошибки рассогласования, ее производной и интегралу ошибки. Таким образом, как ив известной системе, статическая ошибка в точке позиционирования равна нулю. Если в качестве частотного датчика перемещений использовать лазерный интерферометр, то диапазоны изменения величинъ перемещения и скорости могут составлять соответственно (1О - 10) (Г., и ( Ю - 1О®) (fv , где 5 - аг квантования перемещения, d - шаг кв антования скорости, в то время как диапазон преобразования последовательности импульсов в напряжение, управляющее исполнительным устройством, может составлять (1О - 10 ) сГу , где Оу --шаг квантования напряжения Поэтому в следящей системе (2) от работка рассогласования в диапазоне перемещений, превышающем ( Ю -..Ю ) (fc может осуществляться с ограюгаенной постоянной скоростью, не пропорци нальной ошибке рассогласования. Повышение быстродействия в предлагаемой системе достигнуто благодаря ступенчатому изменению коэффициента демпфирования при позиционировании объекта в зонах, значения которых определяются в соответствии с выражением (1). При больших рассогласованиях демпфирование мало, а по мере приближения к положению равновесия оно увеличивается. Прж выбранных в соответствии с (1) и (2) значениями зон и коэффициентов деления для частоты, пропорциональной скорости движения объекта, перемещение последнего вне -зотл пропорпионалъ ного управления может быть определено из выражения V5, где V - максимальная скорость объекта в зоне точного управления; V-,- скорость движения объекта в 1 - номер зоны. Зто означает, что при отработке ших расс.гласований перемещения объекта позиционирование производится с больше скоростью, чем в системе, выбраннопй за прототип, что в конечном счете умень шает общее время позиционирования объе та. Формула изобретения Шфровая следящая система, содержащая первый и второй блоки алгебраического суммирования, первый и второй преобразователи код - частота, выходы которых подключены к импульсным входам первого и второго формирователей импульсов соответстве1Й1 о и третий формирователь импуя1 срв, еадод каждого из формирователей импульсов подключен к соответствующему входу усилителя, выход которого через исполнительный механизм соединен со входом объекта управления, выход которого подключен ко входу датчика перемещений, информацион ный выход второго блока алгебраическог суммирования соединен с входом второго преобразователя код - частота, отличающаяся тем, что, с целью повышения быстродействия системы, она содержит делитель частоты, дешифратор и шифратор, вход которого подключен ко входу дешифратора и к информационному выходу первого блока алгебраического
фиг. суммирования, знаковый выход которого соединен с управляющими входами второго блока алгебраического суммирования и перйого формирователя импульсов, а управляющий и счетный входы - с знаковым и импульсным выходами датчика перемещения соответственно, выход шифратора соединен со входом первого преобразователя код - частота, выход которого подключен к счетному входу второго блока алгебраического суммирования, вход установки в ноль которого соединен с одним выходом дешифратора, другой выход которого подключен к управляющему входу делителя частот, импульсный вход которого соединен с импульсным выходом датчика перемещений, а импульсный выход - с импульсным входом третьего формирователя импульсов, управляющий вход которого подключен к знаковому выходу датчика перемещений, знаковый выход второго блока алгебраического суммирования соединен с управляюигам входом второго формирователя импульсов. Источники информации, принятые во внимание при экспертизе 1.Патент США № 357168П, кл. 318-6ОЗ, опублик. 1974. 2.Патент США № 3555392, кл. 318-603, опублик. 19G9 (прототип).
j
CF
j
ere
J8
т
.ж
y/
AT 4J
#/
18
Д
4ff
Фиг.
