(54) УСТРОЙСТВО ДЛЯ КОНТРОЛЯ МЕСТОПОЛОЖЕНИЯ ПЕРЕМЕЩАЕМЫХ ОБЪЕКТОВ
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ ИЗДЕЛИЙ С ИЗМЕНЯЮЩЕЙСЯ ТОЛЩИНОЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2044314C1 |
| Устройство для ультразвукового исследования глаза | 1985 |
|
SU1284519A1 |
| Устройство для определения положения границ объекта | 1990 |
|
SU1703968A1 |
| Устройство для обнаружения местоположения транспортного средства | 1976 |
|
SU653620A1 |
| Волоконно-оптическое устройство для считывания меток | 1990 |
|
SU1768974A2 |
| Турникет контрольно-пропускного пункта | 1985 |
|
SU1278911A1 |
| Устройство для контроля психофизиологических характеристик операторов автоматизированных систем управления | 1991 |
|
SU1809457A2 |
| СПОСОБ ИЗМЕРЕНИЯ РАЗМЕРОВ ЧАСТИЦ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
RU2040778C1 |
| Устройство для измерения положения объекта | 1984 |
|
SU1260684A1 |
| Резервированное устройство для управления перемещением объекта | 1982 |
|
SU1067468A1 |
I
Изобретение относится к телемеханике и может найти применение в системах контроля за местоположением подвижных объектов, в частности на технологических линиях с ответвлениями.
Известно устройство для контроля местоположения подвижных объектов, содержащее датчики-излучатели и датчики-приемники, усилитель, интегрирующий элемент, триггер, элемент И, пороговый элемент 1.
Такое устройство имеет ограниченную область применения.
Наиболее близким к предлагаемому по технической сущности является устройство для контроля местоположения подвижных объектов, содержащее датчики, выход первого из которых соединен с входами первого и второгопреобразователей, выход второго с входами третьего и четвертого преобразователей соответственно, выходы первого и третьего преобразователей и выходы второго и четвертого преобразователей соединены соответственно с входами первого и второго элементов ИЛИ, выходы которых соединены соответственно с первыми входами первого и второго элементов И, вторые входы которых подключены к выходам блока
определения направления перемещения объекта, выход второго элемента И соединен с первым входом первого регистратора, счетчик 2.
Недостатки этого устройства - невйсокая точность определения местоположения объекта, так как оно фиксируется только по одной из границ его габаритного размера для данного направления перемещения.
Цель изобретения - повышение точности контроля местоположения объекта.
Поставленная цель достигается за счет того, что в устройство для контроля местоположения объектов, содержащее датчики, выход первого из которых соединен с входами первого и второго преобразователей, выход второго - с входами третьего и четsвертого преобразователей соответственно, выходи первого и третьего преобразователей и выходы второго и четвертого преобразователей соединены соответственно с входами первого и второго элементов ИЛИ, выходы которых соединены соответственно с первы0ми входами первого и второго элементов И, вторые входы которых подключены к выходам блока определения направления перемещения объек/fa, выход второго элемента И
соединен с первым входом первого регистратора, введены третий и четвертый элементы ИЛИ, второй регистратор и третий и четвертый элементы И, входы которых соединены соответственно с выходами первого и второго элементов ИЛИ и с выводами блока определения направления перемещения объекта, выходы первого и четвертого элементов И и выходы второго и третьего элементов И соединены соответственно с входами третьего и четвертого элементов ИЛИ, выход третьего элемента ИЛИ соединен с вторым входом первого регистратора, выход четвертого элемента ИЛИ и выход четвертого элемента И подключены к входам второго регистратора.,
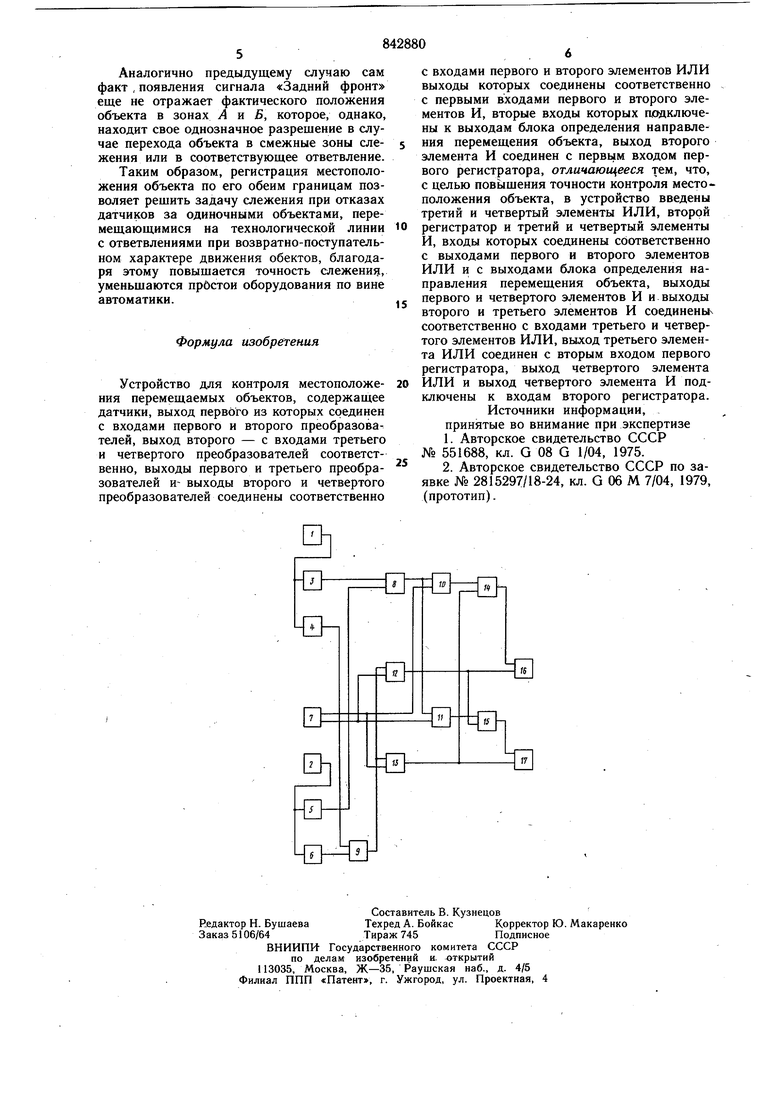
На чертеже дана блок-схема устройства. Устройство содержит датчики 1 и 2, преобразователи 3, 4, 5 и 6, блок 7 определения направления перемещения объекта, элементы ИЛИ 8 и 9, элементы И 10, И, 12 и 13, элементы ИЛИ 14 и 15, регистраторы 16 и 17. Устройство работает следующим образом, При входе (выходе) в «поле зрения датчиков 1 и 2 объекта, движущегося в .прямом (обратном) направлении, преобразователи 3 и 5 (4 И6) формируют импульсы «Передний фронт («Задний фронт), длительность которых обеспечивает их перекрытие при исправных датчиках 1 и 2, имеющих общее «поле зрения.
При этом на первом (втором) выходе блока 7 присутствует «единица, если направление перемещения объекта соответствует прямому (обратному) направлению. И, наоборот, на первом (втором) выходе блока 7 присутствует «нуль, если направление перемещения объекта соответствует обратному (прямому) направлению. Если объект не движется, на обоих выходах блока 7 присутствует «нуль.
При исправных датчиках 1 и 2 и перемещении объекта в прямом направлении (например, из зоны А в зону Б) в момент входа его в зону Б на выходах преобразователей 3 и 5 образуются импульсы «Передний фронт. Один из них через открытые элементы И 10 и ИЛИ 14 поступает на первый вход регистратора 16, в качестве которого может использоваться триггер. При переключении триггера из одного состояния в другое регистрируется наличие одной из границ габарита объекта в зоне Б (например, передней). Положение другой границы (задней) объекта в зоне А регистрируется заранее предварительным переводом другого регистратора (триггера) 17 в другое устойчивое состояние за счет внещнего пускового сигнала, свидетельствующего о начальном нахождении объекта в зоне А.
При дальнейшем перемещении объекта в прямом направлении в момент выхода объекта из зоны А возникает сигнал «Задний фронт, который через открытый элемент
И 13 поступает на второй вход регистратора 17. Триггер 17 переводится в исходное устойчивое состояние, что свидетельствует об освобождении зоны А и нахождении в зоне Б объекта (обеих егб границ).
В случае реверса объекта в момент входа объекта в зону А из зоны Б образуются импульсы «Передний фронт, один из которых через открытые элементы И 11 и ИЛИ 15 поступает на первый вход регистратора 17, что свидетельствует о нахождении передней границы объекта в зоне А. При дальнейщем перемещении объекта в обратном направлении по сигналу «Задний фронт, поступающему через открытый элемент И 12 на второй вход регистратора 16, фиксируется освобождение зоны Б и нахождение в зоне А обеих границ объекта.
Аналогичным образом функционирует устройство при отказе одного из датчиков вида ложная невыдача сигналов «Передний фронт или «Задний фронт.
При отказе, напрпмер датчика 1 вида ложная выдача сигнала «Передний фронт во время перемещения объекта в прямом направлении из зоны А в зону Б указанный сигнал поступает на первый вход регистратора 16. В результате возникает такая ситуация, при которой объект, реально находящийся в зоне А, регистрируется как расположенный в зонах А ( задняя граница) и Б (передняя граница).
С другой стороны, при отказе, например, датчика 1 вида ложная выдача сигнала «Передний фронт последний появляется в момент реального пересечения передней границей объекта «поля зрения датчиков 1 и 2. Следовательно, сам факт появления сигнала «Передний фронт однозначно не отражает фактического положения объекта в зонах А и Б. Однако эта неопределенность не имеет существенного значения для задачи слежения за одиночными объектами, перемещающимися на технологической линии с ответвлениями, так как рассматриваемый объект со временем обязательно покинет зоны А и Б, либо поступив в одно из ответвлений, соответствующих зонам А и Б, либо перейдя в зоны, смежные рассматриваемым зонам Л и . В обоих случаях в предлагаемое устройство извне поступит сигнал, который установит регистраторы 16 и 17 в исходное устойчивое состояние.
При отказе например, датчика 1 вида ложная выдача сигнала «Задний фронт во время нахождения в «поле зрения датчиков 1 и 2 объекта, перемещающегося в прямом направлении, указанный сигнал поступает на второй вход регистратора 17, что вызывает ложный переход его в исходное состояние. В результате возникает такая ситуация, при которой объект, реально находящийся в зонах А (задняя граница) и Б (передняя граница), регистрируется как полностью расположенный в зоне Б.
