(54) ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ШАГОВЫЙ ДВИГАТЕЛЬ
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ЛИНЕЙНЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 1996 |
|
RU2181522C2 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ЛИНЕЙНЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 1996 |
|
RU2156535C2 |
| РЕВЕРСИВНЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ | 1992 |
|
RU2062545C1 |
| УСТРОЙСТВО ДЛЯ ПОЛУЧЕНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ АБРАМОВА В.А. | 2015 |
|
RU2600953C1 |
| ВОЛНОВОЙ ПЬЕЗОДВИГАТЕЛЬ | 2013 |
|
RU2560115C2 |
| Ультразвуковой шаговый двигатель | 1974 |
|
SU511647A1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 1996 |
|
RU2167486C2 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 1996 |
|
RU2167489C2 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 1996 |
|
RU2167487C2 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ | 1995 |
|
RU2122275C1 |

1
Изобретение относится к электротехнике и автоматике, а именно к пьезоэлектрическим шаговым двигателям, которые могут найти применение в качестве привода в системах управления станков с цифровым программным управлением, в гарфопостроителях, устройствах наведения и т.д.
Известен пьезоэлектрический шаговый двигатель, содержащий ротор в виде конуса, с которым фрикционно сопряжена насадка в виде ответного ротору обратного конуса, укрепленная на торсионе, состоящем из пары пьезоэлёментов соответственно линейной и сдвиговой деформации 1}.
Однако конструкция данного двигатели достаточно сложна.
Известен также пьезоэлектрический шаговый двигатель, содержащий ротор в виде диска, корпус и жестко укрепленный в корпусе движитель ротора, выполненный в виде пары жестко скрепленных трубчатых пьезоэлементов соответственно линейной и крутильной деформаций 2.
Недостатком известного двигателя является невысокая точность отработки шагов вследствие того, что часть
времени ротор и движитель не находятся во фрикционном контакте.
Цель изобретения - повышение точности работы.
Указанная цель достигается тем, что пьезоэлектрический шаговый двигатель, содержащий ротор в виде диска, корпус и жестко укрепленный в корпусе движитель ротора,выполненный в виде
0 пары жестко скрепленных трубчатых пьезоэлементов соответственно линейной и крутильной деформаций, содержит дополнительно второй аналогично выполненный движитель, расположенный по
5 другую сторону диска ротора, причем, по крайней мере, один движитель постоянно находится во фрикционном контакте с диском ротора.
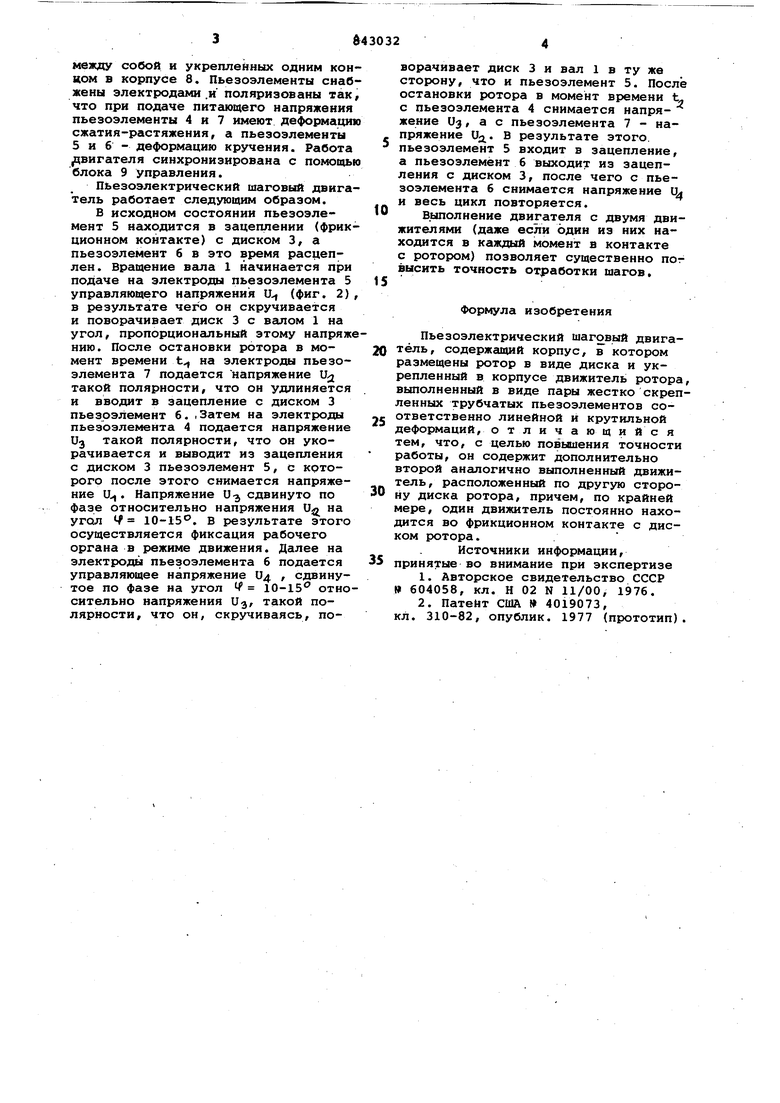
На фиг. 1 схематически изображен
0 пьезоэлектрический шаговый двигатель; на фиг. 2 - последовательность подачи импульсов питания на электроды пьезоэлементов.
Двигатель состоит из вала 1, ус5тановленного в подшипниках 2, на котором укреплен ротор в виде диска 3. С обеих сторон диска расположены движители, каждый из которых содержит пару трубчатых пьезоэлементов 4 и 5, 6 и 7, жестко соединенных х
0
между собой и укрепленных одним концом в корпусе 8. Пьезоэлементы снабжены электродами .и поляризованы так, что при подаче питающего напряжения Пьезоэлементы 4 и 7 имеют деформацию сжатия-растяжения, а Пьезоэлементы 5 и б - деформацию кручения. Работа двигателя синхронизирована с помощью блока 9 управления.
пьезоэлектрический шаговый двигатель работает следующим образом.
В исходном состоянии пьезоэлемент 5 находится в зацеплении (фрикционном контакте) с диском 3, а пьезоэлемент 6 в это время расцеплен. Вращение вгша 1 начинается при подаче на электроды пьезоэлемента 5 управляющего напряжения U (фиг. 2), в результате чего он скручивается и поворачивает диск 3 с валом 1 на угол, пропорциональный этому напряжению. После остановки ротора в момент времени t на электроды пьезоэлемента 7 подается напряжение Цд такой полярности, что он удлиняется и вводит в зацепление с диском 3 пьезоэлемент 6..Затем на электроды пьезоэлемента 4 подается напряжение из такой полярности, что он укорачивается и выводит из зацепления с диском 3 пьезоэлемент 5, с которого после этого снимается напряжение Щ . Напряжение U- сдвинуто по фазе относительно напряжения . угол f - 10-15 . В результате этого осуществляется фиксация рабочего органа в режиме движения. Далее на электроды пьезоэлемента 6 подается управляющее напряжение Од , сдвинутое по фазе на угол lO-lS относительно напряжения изг такой полярности, что он, скручиваясь, поворачивает диск 3 и вал 1 в ту же сторону, что и пьезоэлемент 5. После остановки ротора в момент времени t с пьезоэлемента 4 снимается напряжение из, а с пьезоэлемента 7 - напряжение и. В результате этого. пьезоэлемент 5 входит в зацепление, а пьезоэлемент 6 выходит из зацепления с диском 3, после чего с пьезоэлемента б снимается напряжение Цл и весь цикл повторяется.
выполнение двигателя с двумя движителями (даже если один из них находится в каждый момент в контакте с ротором) позволяет существенно пог высить точность отработки шагов.
Формула изобретения
Пьезоэлектрический шаговый двига0 тёль, содержащий корпус, в котором размещены ротор в виде диска и укрепленный в корпусе движитель ротора, выполненный в виде пары жестко скрепленных трубчатых пьезоэлементов соответственно линейной и крутильной деформаций, отличающийся тем, что, с целью повышения точности работы, он содержит дополнительно второй аналогично выполненный движитель , расположенный по другую сторону диска ротора, причем, по крайней мере, один движитель постоянно находится во фрикционном контакте с диском ротора.
Источники информации, принятые во внимание при экспертизе
кл. 310-82, опублик. 1977 (прототип).
5
ХХХХУХХ XHXWXXX VXXXXWWVvXlLXW
7 S
L
pt|4 SY 4Vx
п
Й/7.
