1
Изобретение относится к электротехникеItJ автоматике и может быть использовано
г
;дпя привода в позиционных автоматических |СИстемах управления станков с цифровым i программным управлением, графопостроите;Лей, устройствах наведения. I Известны устройства, работающие на пье;аоэлементах; лентопротяжные механизмы, г устройства для прижима носителей магнит- ,ной записи, пьезоэлектрические шаговые Iдвигатели 1 и 23 .
Наиболее близким по своей конструкции :и принципу действия к предлагаемому уст:ройству является ультразвуковой линейный шаговый двигатель,
Однако такой двигатель имеет ограниченность длины рабочего органа, что сужает сферу его применёйя; двигатель линейный и не приспособлен передавать вращательное
;движение, что ограничивает его функциональ- ные возможности.
Цель изобретения - расширить область ,применения двигателя,
, Это достигается т.ем, что в предлагаемомдвигателе пары пьезоэлементов вьтолнены
Гв виде секторов, которые прикреплены k симметрично расположенным выступам фигурного диска, причем диск жестко наааже1| на ось вращения и расположен между двумй одинаковыми, жестко соединенными (напри|мер, при помощи регулировочных винтов) (Между собой дисками, свободно ;насажёнйь4;ми на эту ось,,
Для того, чтобы негасились колебания пьезоэлементов, все диски вьтолнены из упругого материала.
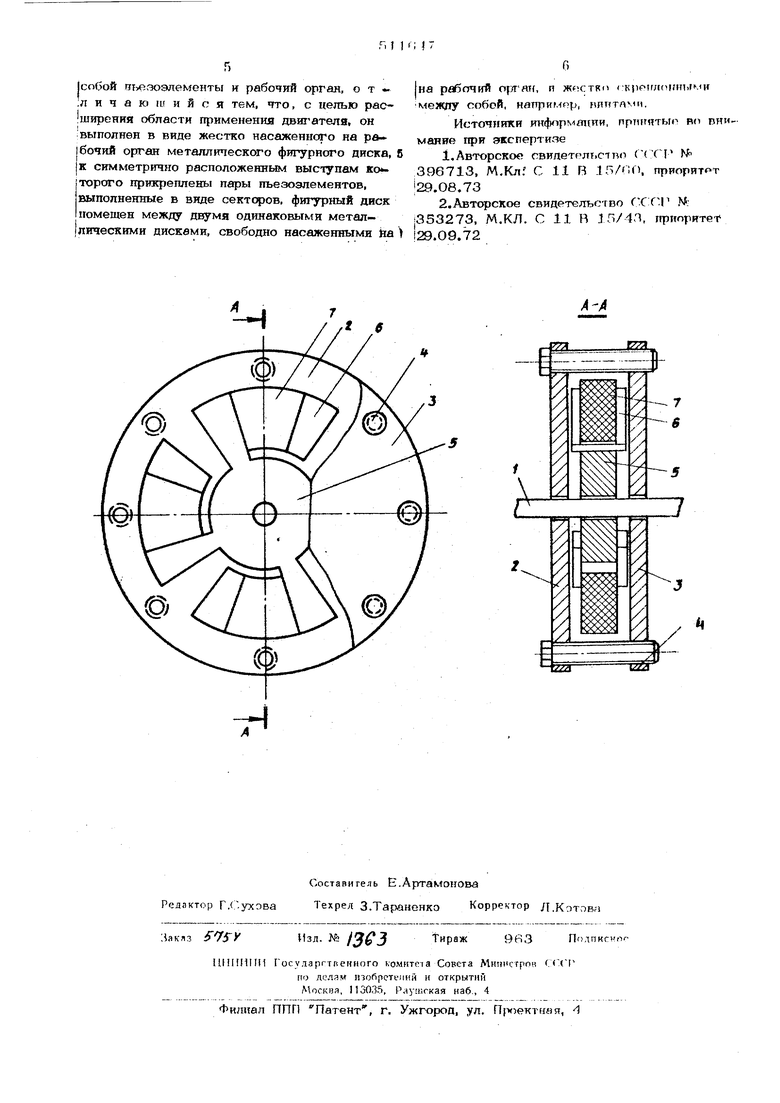
: На чертеже изображен предлагаемый 1ГОВЫЙ ультразвуковой двигатель.
Двигатель состоит из рабочего органа Ij
Л |(ось врашения), двух одинаковых стальных Iдисков 2. п 3, жестко соединенньлх между собой регулировочными винтами 4 (всего 8 шт.) и свободно насаженных на рабочий орган 1, стального диска 5, жестко наса: женного на рабочий орган 1 и расположен-4 кого между дисками 2 и 3, не касаясь их,) 1 четырех идентичных секторов, жестко прик;репленньЕХ к выступам внутреннего диска 9 |(например, при пймощи клея), причем, каж I дый сектор в отдельности состоит из двух
пьеаоэлементов 6 и 7. жестко скрепленных между собой (например, при помсшш клея).
Ультразвуковой шаговый двиг ятель рабг,тает следующим образом.
Электрическое напряжение одной попярнос-g (фиксаторы то одной, то другой пары симметcJTH подается одноврек енно на пьезоэлементы ричных секторов попеременно находятся в за6 (выполняютие роль фиксаторов) И два сек- цеплении с дисками 2 и 3). тора, расположенных симметрично друг другу.Функционально работа секторов связана
Пьезоатементы 6 расширяются и входят в за-г следуюпшм образом, пепление со стальными дисками 2 и 3«/О На первую пару симметричных секторов
Затем напряжение той же гюл$фности, но подается прямое напряжение и сектора повоедвинутое по фазе на Ю-45° (сдвиг по фазе рачивают диск 5 и ось враахения 1 (рабочий между напряжением, подаваемым на пьезоэле- орган) на один шаг относительно неподвижных менты 6 я 7 выбирается так, чтобы пьезоэйе дисков 2 и 3 (диски 2 и 3 крепятся к любо- менты 7 начинали свое движение только в основанию), затем на первую пару ceKit - мент Щ1ОТНОГО зацепленкя пьезоэпементов 6 с дисками 2 и 3), подается на пьезоэпементы 7 (выполняющих роль подвижки) этих же сейтсч ов. Пьезоалементы 7 обоих секторов рас« шир5аются и поворачивают диск 5, а вместе с ним ось 1 против часовой стрелки относитель- но дисков 2 и 3 на один шаг, равтвьий амплиту де колебания пьезоаяементов 7, Затем на пьезоалементы 6 обоих секторов подается нзт пряжение обратной полярности. Они сокращавэт,ся и выходят из зацепления с дисками 2 и 3. После этого напряжение той же полярности, но сдвинутое по фазе на 10-45 , подается на пьезоэлементы 7 обоих секторов. | Они сокра- щаются, передвигают уже пьезоэлементы 6 про тив часовой стрелки на один шаг, равный ам« плитуде колебания пьезоэлементов 7, и тем самым сектора возвращаются в исходное поло- жение, В .тот момент, когда на пьезозлементы б Первой пары секторов подеется обратное напряжение, на пьезоэлементы б второй пары симметричных секторов подается напряжение прямое. Они расширяются и входят в запепле- нне с дисками 2 и 3, Затем напряжение той ж , полярности, но сдвинутое по фазе на 1О-45 подается на пьезоэлементы 7 второй пары сек торов и эти пьезоэлементы,, расширяясь, поворачивают диск 5 и ось 1 относительно дисков 2 и 3 против часовой стрелки etiie на один шаг. После этого, в такой xie последователь™ ности на пьезоэлементы второй парьг секторов подается обратное напряженке и, они воз- вращаются в исходное положение; Напряжение на вторую пару симметричных секторов подается в последовательности, аналогичной первой пары, но сдвинутое на 18(5 , что дает возможность использовать при работе двигателя, как положи1-елт,ную, 55 так и отрицательную части синусоидь ущзавг ляюшего сигнала, а это увеличивает скорость вращения в два раза. Кроме т:)Го, наличие двух пяр фикспт; роБ, (мботйкписх поперемптшо, обйспечнвлг-т вмл-
нос7ь рабочего органа рабо-гап под нагруокой и не позволяет ему тфоскалвзывать назад в момент сокращения фиксаторов и воэврашения секторов в исходное положение ров подается обратное напряжение и, ceKTOpia воаврашаются в исходное положение, В это же самое время на вторую пару симметр ных: ;Секторов подается прякюе напряжение, и она поворачивает дальше на один шаг диск 5 и ось 1, После этого вторая пара возврашается g исходное положение, а первая продолжает вращать рабочий орган дальпю вперед и так ; далее. Для вращения двигателя в обратную сто- jpcffly достаточно изменить пол1фность напр жения на пьезоэлементах 7 относительно напряжения, подаваемого на пьезоэлементы 6, на обратную. Конструкция двигателя позволяет изменять i мощное 1Ъ и скорость двигателя в широких пределах при применении различных типов пьезоэлементов, а также любых других актнв,ных элементов. Таким образом, использование ультразвукового шаговсяго двигателя расширяет функциональные возможности линейных шаговых двигателей, содержащих пьезоэлементы. Кроме того, такой двигатель лучше обыч- ных электрических шаговых двигателей, при- меняемых в системах автоматики. Он повышает на порядок и выше частоту работы шаговых двигателей (2О + 1ОО кгц), что увеличивает максимальную скорость вра- шения, дает возможность плавного регулиро-; вания величины шага от тысячных долей мшг«рона до десятков микрон, что позволяет регулировать скорость двигателя от ползучих скоростей до максимальных, уменьшает время фазгона и останова, обеспечтзает более вы- сокуго точность позицион1фования, предлагаемое конструктивное решение значительно упрощает изготовление шаговых двигателей. Формула изобретения З пьтразвуковой иогопый двигатель, со- .держащий попарно жестко соедниотпшге
собой игэо.эоэлемеиты и рабочий орган, о т ;л и ч а ю иг и и с я тем, что, с целью рас ширения области гцэименения двигателя, он выполнен в виде жестко насаженнсго на рл 1бочий орган металлического фигурного диска, |к симметрично расположенным выступам ко торого пргафеплены пары пъезозлементов, выполненные в виде сектс ов, фигурный диск помещен между двумя одинаковыми метал{лическимн дисками, свободно насаженными йа
|на рабочий о{Я«т{, п ж«;(:тк( :к))р1гл( межлУ собой, наттри.ер, нпптп и,
Источники информации, пртпгятып во пнмание при экспертизе
1, Авторское евидетрл1 ст по ((Т № 396713, М.Кл. С 11 R 15/00. приоритет |29.О8.73
2.Авторское свидетельство fСТР № |353273, М.КЛ. С 11 Н 15/4Л, приоритет 129.09.72

| название | год | авторы | номер документа |
|---|---|---|---|
| Ультразвуковой линейный шаговый двигатель | 1974 |
|
SU502426A1 |
| Пьезоэлектрический шаговый двигатель | 1979 |
|
SU843032A1 |
| Шаговый двигатель | 1977 |
|
SU738016A1 |
| Ультразвуковой шаговый двигатель | 1975 |
|
SU548912A1 |
| Шаговый двигатель для прецизионного перемещения | 1978 |
|
SU674123A1 |
| ЭЛЕКТРОДВИГАТЕЛЬ | 2006 |
|
RU2321142C1 |
| РОТОРНЫЙ ДВИГАТЕЛЬ ВНЕШНЕГО И ВНУТРЕННЕГО СГОРАНИЯ | 2000 |
|
RU2202701C2 |
| Устройство для шаговой подачи изделий | 1978 |
|
SU722817A1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ЛИНЕЙНЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 1996 |
|
RU2181522C2 |
| ВОЗБУДИТЕЛЬ МЕХАНИЧЕСКИХ КОЛЕБАНИЙ | 2008 |
|
RU2440660C2 |
Г77Л
РТА
,
