Изобретение относится к области электрических двигателей, а более точно касается пьезоэлектрических линейных шаговых двигателей, и может быть использовано в качестве исполнительного механизма в электротехнике, телемеханике, радиотехнике и автоматике.
Известен линейный двигатель, содержащий направляющую, корпус и движитель в виде пластин, укрепленных под углом в корпусе и фрикционно взаимодействующих с направляющей (Авторское свидетельство СССР 801149, MKИ H 01 L 41/02).
Однако данный линейный двигатель имеет большие габаритные размеры и массу, осуществляет перемещение с помощью упругих пластин, при этом невозможно получение больших усилий и обеспечение точности позиционирования.
Известен пьезоэлектрический линейный шаговый двигатель, содержащий корпус с закрепленными в нем фиксирующими узлами и подвижную часть с рабочим элементом (Авторское свидетельство СССР 720576, МКИ H 01 L 41/04).
Однако этот двигатель имеет ряд недостатков: большее количество деталей, сложность конструкции, сложность изготовления фиксирующих узлов и возможность поворота подвижной части в процессе линейного перемещения.
Наиболее близким аналогом к заявленному изобретению является пьезоэлектрический линейный шаговый двигатель, содержащий корпус с закрепленными в нем фиксирующими узлами, выполненными из не менее двух пьезоблоков, расположенных в продольной плоскости друг за другом, и подвижную часть, при этом каждый пьезоблок состоит из сдвигающего пьезоэлемента, фиксирующего пьезоэлемента и фрикционного элемента (Авторское свидетельство СССР 502426, H 02 N 2/04, 19.04.1976).
Однако этот двигатель имеет низкую точность шага и усилия на рабочем элементе двигателя и низкую точность позицирования подвижной части.
В основу предлагаемого изобретения была положена задача создания пьезоэлектрического линейного шагового двигателя, конструктивное выполнение которого позволило бы улучшить синхронизацию работы пьезоэлементов при их сдвигах и повысить точность шага и усилие на рабочем элементе двигателя, а также повысить точность позиционирования подвижной части.
Это достигается тем, что в пьезоэлектрическом линейном шаговом двигателе, содержащем корпус с закрепленными в нем фиксирующими узлами, выполненными из не менее двух пьезоблоков, расположенных в продольной плоскости друг за другом, и подвижную часть, при этом каждый пьезоблок состоит из сдвигающего пьезоэлемента, фиксирующего пьезоэлемента и фрикционного элемента, согласно изобретению сдвигающий элемент и фиксирующий элемент разделены относительно друг друга, корпуса и фрикционного элемента изоляторами, при этом подвижная часть имеет не менее одной направляющей, которая входит в соответствующую направляющую на фрикционных элементах, а промежутки между пьезоблоками заполнены эластичным изоляционным материалом.
Пьезоэлементы могут быть выполнены в виде пакета из пьезоэлектрических пластин, колец или их секторов, электроды которых соединены параллельно через один, при этом направление поляризации каждой последующей пьезоэлектрической пластины, кольца или сектора направлено в противоположную сторону от предыдущей.
Далее изобретение поясняется описанием конкретных примеров его выполнения со ссылкой на прилагаемые чертежи, на которых:
фиг. 1 изображает пьезоэлектрический линейный шаговый двигатель (первый вариант), вид спереди;
фиг.2 - то же, продольный разрез;
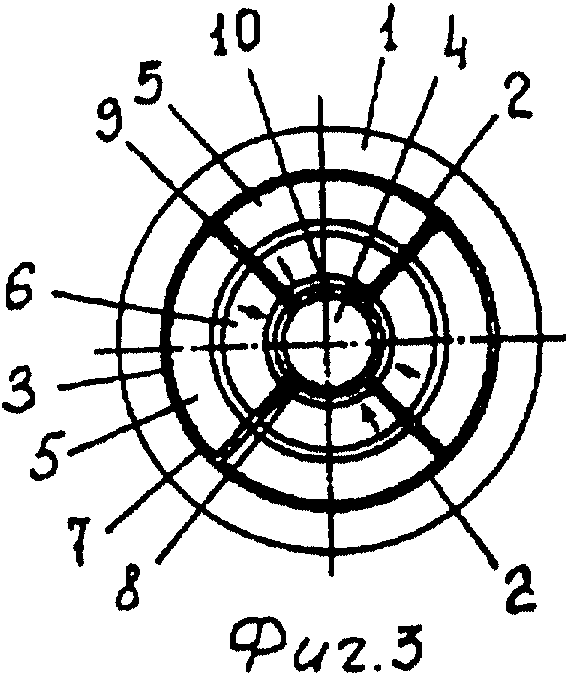
фиг.3 - второй вариант исполнения двигателя, вид спереди;
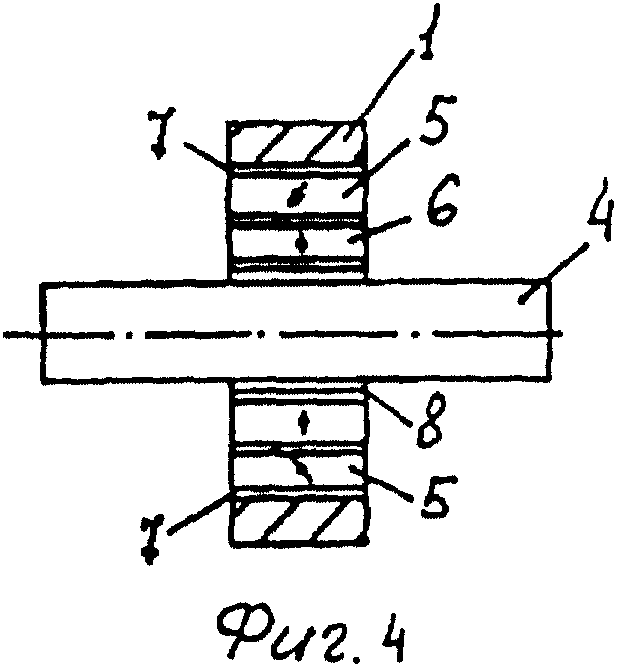
фиг.4 - то же, продольный разрез;
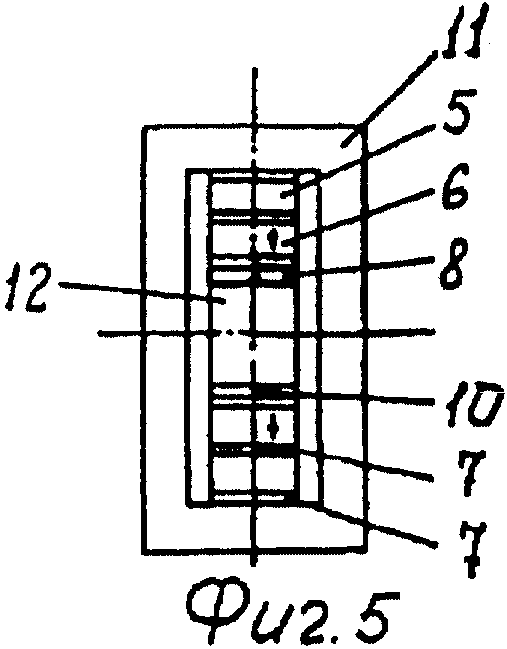
фиг.5 - третий вариант исполнения двигателя, вид спереди;
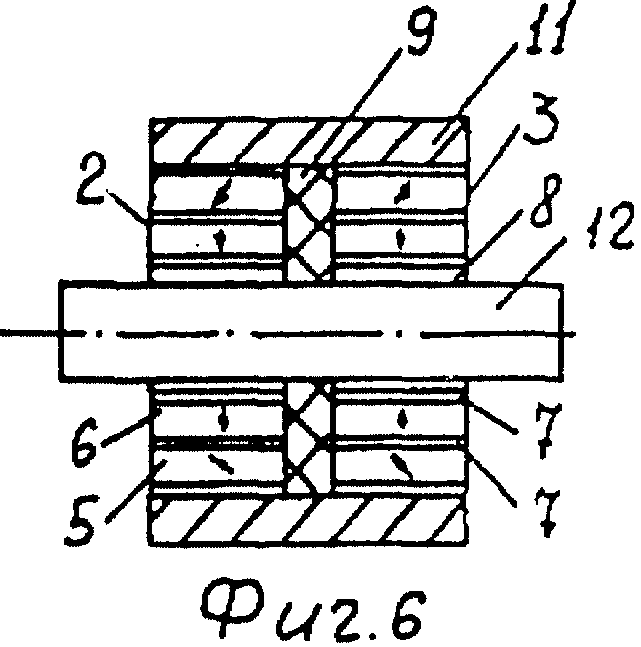
фиг.6 - то же, продольный разрез;
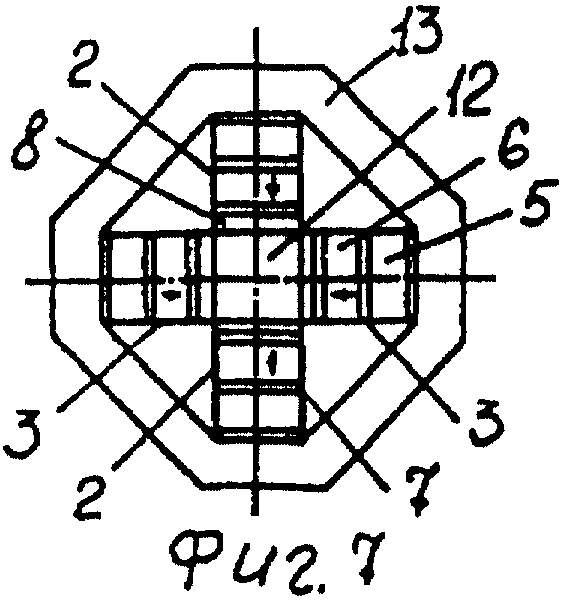
фиг.7 - четвертый вариант исполнения двигателя, вид спереди;
фиг.8 - то же, продольный разрез;
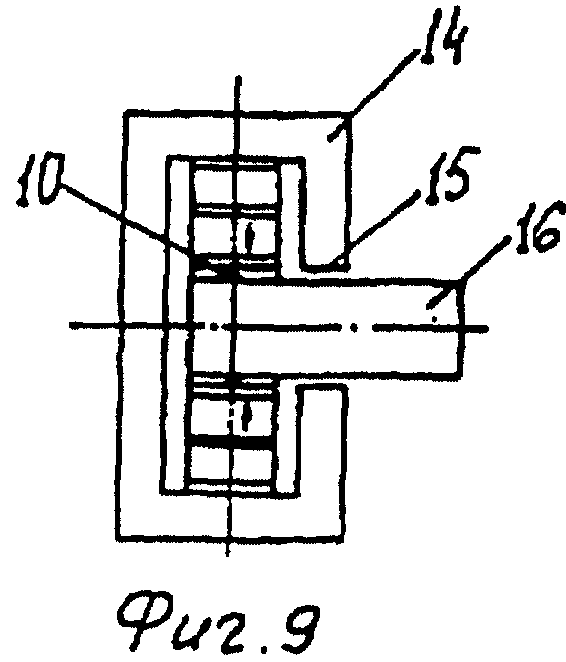
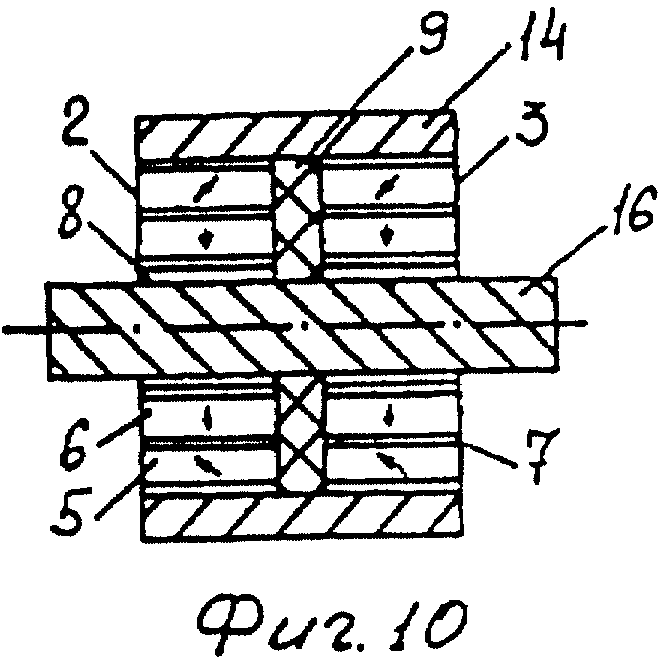
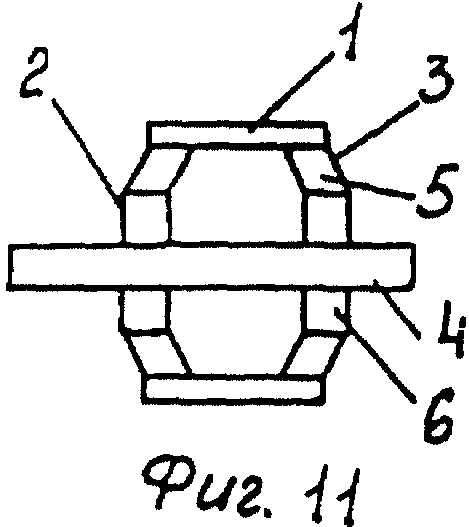
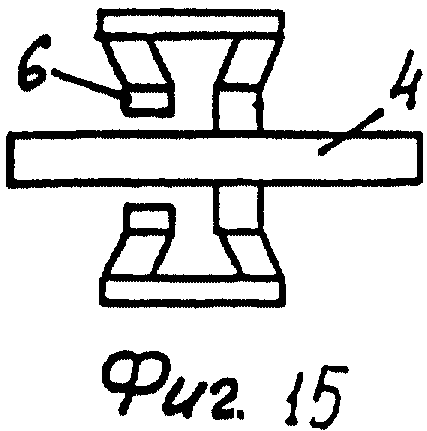
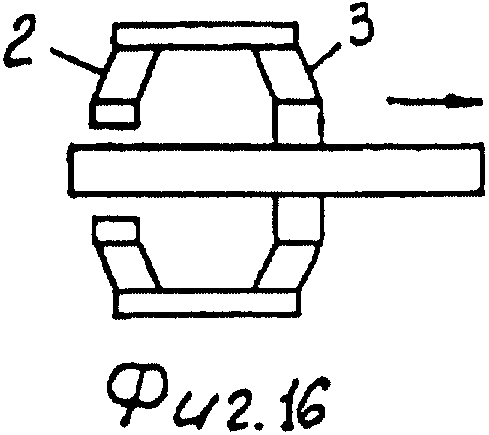
фиг. 9-16 - такты работы пьезоэлектрического линейного шагового двигателя.
Пьезоэлектрический линейный шаговый двигатель содержит цилиндрический корпус 1 (фиг. 1 и 2), в котором расположены два пьезоблока 2 и 3, и подвижную часть в виде цилиндрического стержня. Пьезоблоки 2 и 3 жестко прикреплены к внутренней поверхности цилиндрического корпуса 1. Каждый пьезоблок 2 и 3 соответственно состоит из соединенных между собой сдвигающего пьезоэлемента 5, фиксирующего пьезоэлемента 6, изоляторов 7 и фрикционного элемента 8. Каждый сдвигающий пьезоэлемент 5 имеет вектор начальной поляризации, направленный под углом к продольной оси двигателя. Фиксирующие пьезоэлементы 6 имеют вектор начальной поляризации, направленный перпендикулярно продольной оси двигателя. Изоляторы 7 обеспечивают изоляцию сдвигающего и фиксирующего пьезоэлемента относительно друг друга, а также относительно корпуса 1 и фрикционного элемента 8. Фрикционный элемент 8 выполнен разрезным для обеспечения более плотного обжатия подвижной части 4 пьезоблоками 2 и 3.
Каждый пьезоэлемент имеет электроды, к которым подключены провода (эти элементы на чертеже не показаны).
Промежутки между пьезоблоками 2 и 3 заполнены эластичным изоляционным материалом 9.
На поверхности подвижной части 4 выполнена направляющая 10, которая входит в соответствующую направляющую на фрикционном элементе 8. Направляющая 10 исключает возможность радиального смещения цилиндрического стержня.
Возможны другие варианты исполнения пьезоэлектрического линейного шагового двигателя.
Во втором варианте (фиг.3 и 4) в отличие от первого пьезоблоки 2 и 3 расположены в одной поперечной плоскости и выполнены в виде секторов. Это снижает массу и габаритные размеры двигателя.
Третий вариант (фиг. 5 и 6) отличается от первого формой корпуса, подвижной части и более простой в изготовлении конструкцией пьезоэлементов и пьезоблоков. Корпус 11 имеет форму параллелепипеда, а подвижная часть выполнена в виде стержня 12 прямоугольного поперечного сечения.
В четвертом варианте (фиг.7 и 8) корпус 14 имеет вырез 15, через который подвижная часть 16 выходит за пределы корпуса. Конструктивное исполнение пьезоблоков аналогично третьему варианту.
Двигатель работает следующим образом.
Пьезоблоки 2 (фиг.9) и 3 выполнены из одинаковых сдвигающих пьезоэлементов 5 и фиксирующих пьезоэлементов 6. Работа пьезоблоков 2 и 3 осуществляется при подаче на электроды пьезоэлементов напряжения соответствующей полярности. При подаче на электроды сдвигающих пьезоэлементов 5 положительного напряжения за счет обратного пьезоэффекта происходит сдвиг внутренней части влево относительно внешней части, закрепленной в корпусе 1. При подаче положительного напряжения на фиксирующие пьезоэлементы 6 они зажимают подвижную часть 4, т.к. вектор их поляризации направлен перпендикулярно продольной оси двигателя. При подаче отрицательного напряжения происходит обратное действие: сдвигающие пьезоэлементы 5 сдвигаются вправо, а фиксирующие пьезоэлементы 6 отжимаются от подвижной части 4.
Рабочий цикл состоит из шести тактов.
Положение, соответствующее первому такту, изображено на фиг. 9. На сдвигающий пьезоэлемент 5 пьезоблока 2 и фиксирующие пьезоэлементы 6 пьезоблоков 2 и 3 подано положительное напряжение, а на сдвигающий пьезоэлемент 5 пьезоблока 3 подано отрицательное напряжение. При этом сдвигающий пьезоэлемент 5 пьезоблока 3 смещен вправо, а сдвигающий пьезоэлемент 5 пьезоблока 2 смещен влево, фиксирующие пьезоэлементы 6 обоих пьезоблоков зажимают через фрикционные элементы 8 подвижную часть 4.
Во втором такте (фиг.10) на фиксирующий пьезоэлемент 6 пьезоблока 3 подается отрицательное напряжение, при этом он отжимается от подвижной части 4.
В третьем такте (фиг.11) на сдвигающий пьезоэлемент 5 пьезоблока 2 подается отрицательное напряжение и он, смещаясь вправо, перемещает фиксирующий пьезоэлемент 6 и подвижную часть 4 на один шаг. Одновременно на сдвигающий пьезоэлемент 5 пьезоблока 3 подается положительное напряжение и он смещается совместно с фиксирующим пьезоэлементом 6 влево.
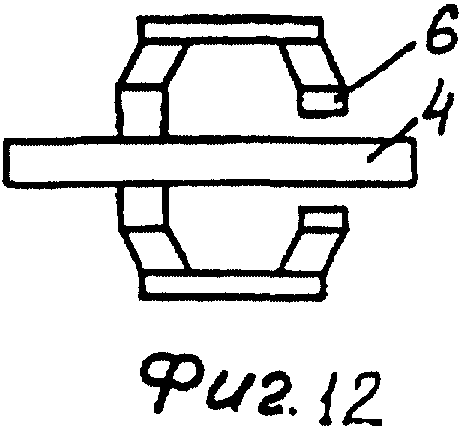
В четвертом такте (фиг.12) положительное напряжение подается на фиксирующий пьезоэлемент 6 пьезоблока 3, который обжимает подвижную часть 4.
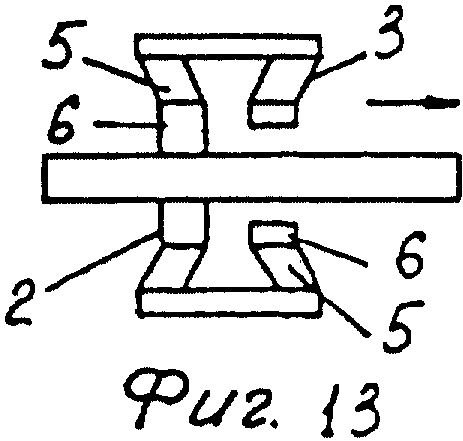
В пятом такте (фиг.13) на фиксирующий пьезоэлемент 6 пьезоблока 2 подается отрицательное напряжение и он отжимается от подвижной части 4.
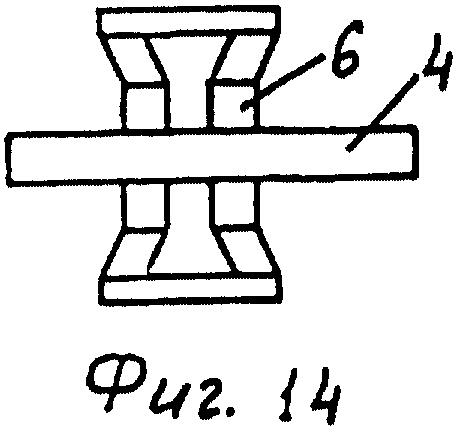
В шестом такте (фиг.14) пьезоблоки 2 и 3 расходятся, т.е. на электроды сдвигающего пьезоэлемента 5 пьезоблока 2 подается положительное напряжение и он смещается влево, а на сдвигающий пьезоэлемент 5 пьезоблока 3 подается отрицательное напряжение и он совместно с фиксирующим пьезоэлементом 6 и подвижной частью 4 смещается вправо. Происходит перемещение подвижной части 4 еще на один шаг. На этом рабочий цикл завершается, подвижная часть переместилась на два шага.
Далее процесс линейного перемещения продолжается в той же последовательности.
Для осуществления реверса необходимо изменить порядок подачи напряжения на фиксирующие пьезоэлементы. Применение нескольких последовательно установленных пьезоблоков позволит значительно увеличить усилие на подвижной части.
Предлагаемый пьезоэлектрический линейный шаговый двигатель имеет простую конструкцию и технологию изготовления, небольшие габаритные размеры и массу, большое усилие на подвижной части, а также позволяет повысить точность позиционирования и равномерность линейного перемещения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 1996 |
|
RU2167487C2 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ЛИНЕЙНЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 1996 |
|
RU2156535C2 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 1996 |
|
RU2167486C2 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 1996 |
|
RU2161364C2 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 1996 |
|
RU2167489C2 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 1996 |
|
RU2153219C2 |
| УСТРОЙСТВО ДЛЯ БЕЗОПИЛОЧНОГО РЕЗАНИЯ ДРЕВЕСИНЫ | 1994 |
|
RU2084333C1 |
| УЛЬТРАЗВУКОВОЙ УТЮГ | 1995 |
|
RU2083745C1 |
| ПРЕЦИЗИОННЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ШАГОВЫЙ МЕХАНИЗМ ПЕРЕМЕЩЕНИЯ | 2005 |
|
RU2291551C2 |
| МАССАЖНАЯ ЩЕТКА | 1995 |
|
RU2112493C1 |


Использование: в качестве исполнительного механизма. Сущность изобретения: пьезоэлектрический линейный шаговый двигатель содержит корпус с закрепленными в нем фиксирующими узлами и подвижную часть. Фиксирующие узлы выполнены из не менее двух пьезоблоков, расположенных в продольной плоскости друг за другом. Каждый пьезоблок состоит из сдвигающего пьезоэлемента и фиксирующего пьезоэлемента, разделенных относительно друг друга, корпуса и фрикционного элемента изоляторами. Подвижная часть имеет не менее одной направляющей, которая входит в соответствующую направляющую на фрикционных элементах, выполненных разрезными. Промежутки между пьезоблоками заполнены эластичным изоляционным материалом. Технический результат: повышение точности и усилия. 1 з.п. ф-лы, 16 ил.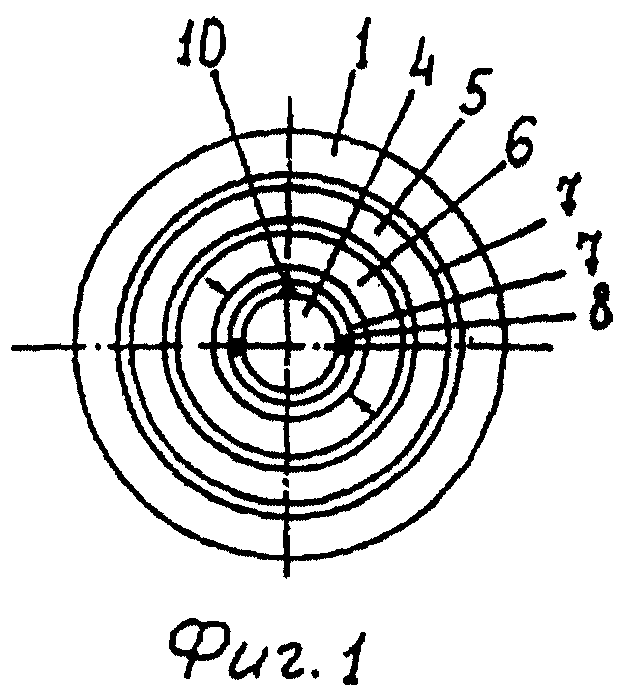
| Ультразвуковой линейный шаговый двигатель | 1974 |
|
SU502426A1 |
| US 5136201, 04.08.1992 | |||
| УСТРОЙСТВО для КЛАССИФИКАЦИИ ЗЕРНИСТЫХ МАТЕРИАЛОВ | 0 |
|
SU360975A1 |
| Способ открытой прошивки цилиндрических заготовок | 1974 |
|
SU518262A1 |
| US 5237238, 07.08.1993 | |||
| Резец с креплением режущей пластинки силами резания | 1957 |
|
SU112454A1 |

