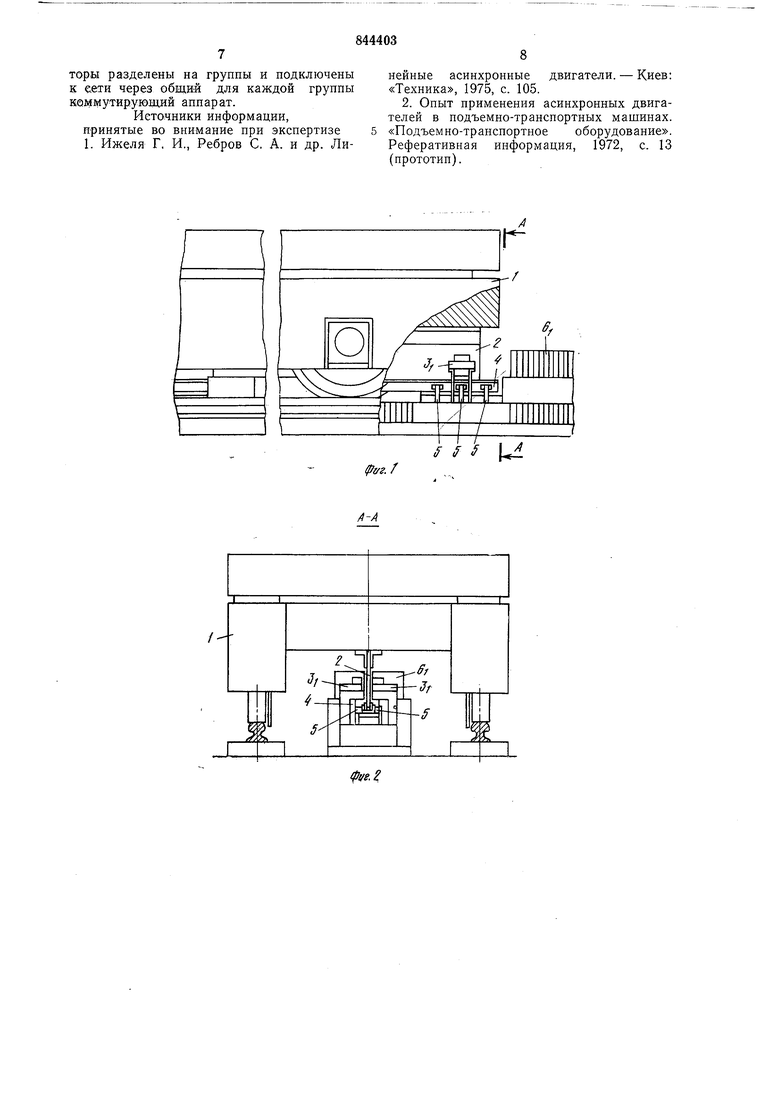
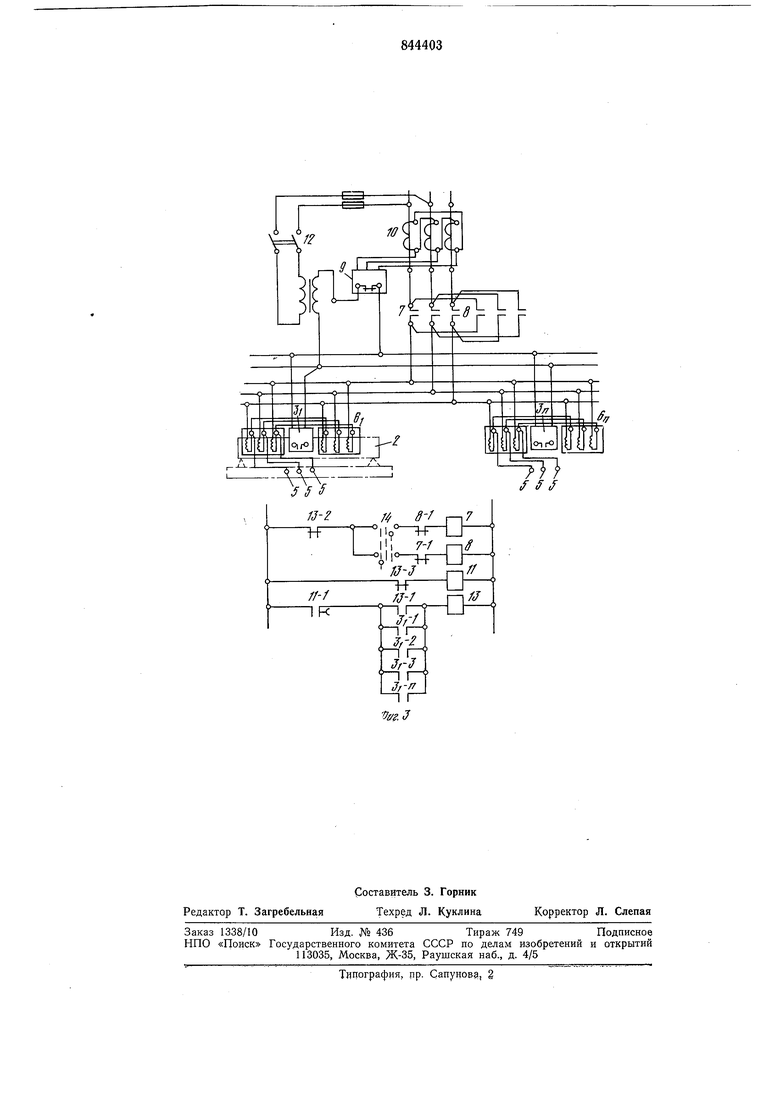
но вдоль пути с интервалами между ними, а якорные пластины закреплены под тележками рулоновозов, коммутирующую аппаратуру для управления индукторами и датчиками и отличающееся тем, что линейные индукторы выполнены, каждый, в виде двух секций, установленных последовательно друг за другом с интервалом, в котором размещен упомянутый датчик, концы фазных обмоток индукторов выведены на контакты, установленные последовательно вдоль пути, а на рулоновозе установлен выполненный в форме лыжи контактный элемент, служащий для замыкания концов фаз, причем индукторы разделены на группы и подключены к сети через общий для каждой группы коммутирующий аппарат. На фиг. 1 показано устройство, вид сбоку; на фиг. 2 разрез А-А фиг. 1; на фиг. 3 - схема управления линейными индукторами.
Тележка 1 (фиг. 1) показана в положении, когда закрепленная под ней якорная пластина 2 уже вошла в зазор датчика положения Зь а контактная лыжа 4 замкнула между собой контакты ъ концов фазных обмоток линейных индукторов бь замыкание контактов и между собой может быть осуществлено либо непосредственно через лыжу 4, и в этом случае лыжа изготавливается из электропроводного материала, либо через стационарно установленные против контактов 5 медные шины при воздействии на контакты 5 лыжей 4. В последнем случае лыжа 4 выполняется из неэлектропроводного износостойкого материала. К выходным обмоткам датчиков положения ЗгЗп (по числу линейных индукторов) подключены электромагнитные реле (фиг. 3), контакты которых Зр -Зг/г также показаны на фиг. 3. Контакторы 7 и 8 осуществляют подачу напряжения на группу линейных индукторов брбп и при необходимости реверсирование питания. Фильтр-реле 9 состоит из собственных фильтра тока обратной последовательности и включенного на его выходе реле, контакты которого используются для отключения питания обмоток возбуждения датчиков положения. Фильтр-реле 9 включен через измерительные трансформаторы тока 10, которые для исключения составляющей тока нулевой последовательности соединены между собой по схеме «треугольник. Лыжа 4 выполнена более длинной, чем якорная пластина 2, а контакты 5 установлены относительно датчика положения 3 таким образом, чтобы входу якорной пластины в зазор датчика предшествовало замыкание двух первых контактов 5, а при замыкании третьего контакта лыжа полностью находилась в зазоре датчика положения. Выход якорной пластины из зазора датчика положения предшествует размыканию контактов 5. При расстоянии между соседними
контактами 5, равном длине датчиков положения, и их симметричном относительно него расположении вылет лыжи на якорную пластину впереди составляет половину этого расстояния, а сзади - его длину. Применение в качестве датчика положения индукн,ионного бесконтактного датчика скорости движения электропроводной полосы позволяет осуществлять выключение питания не 10 только перед размыканием контактов 5, но и при достижении рулонрвозом заданной максимальной скорости, что необходимо при импульсном регулировании скорости.
При погрузке на рулоновоз или выгрузке 5 рулона питание линейных индукторов отключено коммутирующими аппаратами (контакторами) 7 и 8 (фиг. 3), а контакты 5 замкнуты лыжей 4 стоящего рулоновоза. Поэтому при включении коммутирующим 20 аппаратом 7 питания индукторов между ними и якорной пластиной возникает тяговое усилие, приводящее рулоновоз в движение. В момент прохождения конца якорной пластины через рабочий зазор датчика 25 положения (скорости) на выходе последнего появляется всплеск сигнала, вызывающий отключение питания коммутир абщим аппаратом 7, и размыкание контактов 5 лыжей 4 происходит при отсутствии тока. 0 Длительность выключения питания коммутирующим аппаратом определяется выдержкой реле времени И (фиг. 3) и принимается достаточной для размыкания лыжей 4 всех контактов 5. После этого рулоновоз 5 движется на выбеге по инерции до следующего линейного индуктора. Благодаря отсутствию механической передачи и весьма низким ходовым сопротивлениям движению,, а также большой массе рулоновоза с 0 грузом движение может быть весьма длительным. При необходимости расстояние индукторами может быть выбрано малым, что не приведет к увеличению числа требуемых комментирующих аппаратов, 5 так как к каждому из них может быть подключено любое количество линейных индукторов, а число коммутирующих аппаратов определяется в основном числом участков пути, на каждом из которых одновременно 0 может находиться не более одного рулоновоза.
Движение рулоновозов предполагается по кольцевой схеме.
При проходе рулоновоза над следующим 5 индуктором якорная пластина 2, пройдя первую секцию, замыкает 4 два первых контакта 5, вызьшая двухфазный несимметричный режим питания обмоток индукторов, при котором фильтр-реле 9 0 тока обратной последовательности отключает питание обмотки возбуждения датчика положения (скорости) 3, и при заходе в его рабочий зазор якорной пластины 2 всплеска сигнала не будет и отключение питания коммутирующим аппаратом 7 не
произойдет. В момент замыкания лыжей
4всех трех контактов 5 симметоия питания восстзнявливается, после чего реле 9 восстанавливает цепь питания обмотки возбуждения датчика положения.
При увеличении скорости рулоновоза сигнал соответствующего датчика ЗГ-Зп увеличивается, что вызывает при определенном его уровне срабатывание включенного на его выходе реле и кратковременное отключение питания коммутирующим аппаратом 7. Длительность отключения определяется выдержкой реле времени И. Схема ((Ьиг. 3) позволяет осуществлять режим движения с ограничением максимальной скопости по сигналу датчика СКОРОСТИ и пеоиолическое (импульсное) питание линейных индукторов.
В исходном состоянии схемы управления (фиг. 3) тоанс(Ьорматор 12 включен и обмот и возбуждения датчиков 31-37- и схема релейной автоматики получают питание. При этом промежуточное реле 13 выключено и его замыкающий контакт 13-1 разомкнзт, а размыкающие контакты 13-2 и 13-3 замкнуты, реле времени 11 включено и его замыкающий контакт 11-1 в цепи промежуточного реле 13 замкнут.
Переключатель 14 стоит в нейтральном положении и катущки контакторов 7 и 8 не включены и их блок-контакты 7-1 и 8-1 замкнуты. Включение контактора 7 или 8 осуществляют ПОВОРОТОМ переключателя в одно из двух крайних положений. При включении контактора 7 он размыкает свой блок-контакт 7-1 в цепи катущки контактора 8 и подает питание на свою группу линейных индукторов, из которых включенным оказывается лишь один, контакты
5которого замкнуты междз собой лыжей 4. При этом может быть осуществлено соединение фазных обмоток по схеме «звезда либо «треугольник. При симметричной нагрузке размыкающий контакт фильтрареле 9 замкнут, обеспечивая подачу на обмотки возбуждения датчиков ЗгЗп. При скорости движения рулоновоза, меньщей заданной максимальной, замыкающей контакт , 3i-2 ЗрЗ, реле соответствующего датчика в цепи реле 13 разомкнут.
Срабатывание реле датчика происходит либо при превыщении тележкой заданной скорости, либо при выходе из зазора датчика якорной пластины, когда из-за электромагнитной несимметрии на выходе, датчика возникает всплеск сигнала. При этом соответствующий контакт 3i-l, 3i-2, ЗрЗ, датчика в цепи промежуточного реле 13 замыкается, реле 13 включается, замыкает свой контакт 13-1, обеспечивая себе цепь питания, и размыкает контакты 13-2, 13-3, вызывая выключение контактора 7 и реле рремещ П. При этом размыкание контак
тов 5 лыжей 4 происходит без дуги. Реле 11 размыкает с выдержкой времени свой контакт 11-1 в цепи промежуточного реле 13, что вызывает выключение промежуточного реле 13, замыкание его контактов 13-2 и 13-3 и включение контакторов 7 и 8 и реле времени.
Таким образом, на обмотки линейных индукторов снова подается напряжение, а схема подготовлена к новому автоматическому циклз кратковременного отключения питания индукторов.
Выключение питания обмоток возбуждения датчиков контактами реле 9 на время захода в зазор датчика якорной пластины способствует улучщению использования линейных индукторов.
Реверсирование питания линейных индукторов включением контактора 7 необходимо в торможения противовклютением и при точной остановке рулоиовоза в местах загрУзки и разгрузки.
Схема управления может быть выполнена и на бесконтактных элементах.
Формула изобретения
1.Способ управления линейными двигателями тягового электропривода, например
рулоновоза. индукторы которых, содержащие многоАазные обмотки, установлены стационарно на пути, заключающийся в последовательном включении индукторов при подходе к ним рулоновоза по сигналу датчиков положения с последующим их выключением после его прохода, отличающийс я тем, что, с целью упрощения и повыщения надежности, включение ИНДУКТОРОВ при подходе рулоновоза и их отключение после
поохода рулоновоза осуществляют замыканием и размыканием между собой концов подключенных к сети (Ьазньтх обмоток ИНДУКТОРОВ контактным элементом рулоновоза. причем на время размыкания концов
Аачных обмоток каждого индуктора по сигналу его датчика положения отключают инлукторы от сети.
2.Устройство для осуществления способа по п. 1, содержащее линейные двигатели
электропривода, например рулоновоза, индукторы которых установлены стационарно вдоль пути с интервалами между ними, а якорные пластины закреплены под тележками рулоновозов, коммутирующую аппаратуру для управления индукторами и датчик, отличающееся тем, что индукторы выполнены, каждый, в виде двух секций, установленных последовательно друг за другом с интервалом, в котором размещен
упомянутый датчик, концы фазных обмоток индукторов выведены на контакты, установленные после.довательно вдоль пути, а на рулоновозе установлен выполненный в форме лыжи контактный элемент, служащий
ДЛЯ замыкания концов фаз, причем йНДук-торы разделены на группы и подключены к сети через общий для каждой группы коммутирующий аппарат.
Источники информации, п-ринятые во внимание при экспертизе 1. Ижеля Г. И., РеброБ С. А. и др. Линейные асинхронные двигатели. - Киев: «Техника, 1975, с. 105.
2. Опыт применения асинхронных двигателей в подъемно-транспортных машинах. «Подъемно-транспортное оборудование. Реферативная информация, 1972, с. 13 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления линейным тяговым двигателем тележек рельсового транспорта | 1981 |
|
SU1224192A1 |
| УСТРОЙСТВО ДЛЯ ПИТАНИЯ ЭЛЕКТРОДВИГАТЕЛЯ КОМПРЕССОРА ТЕПЛОВОЗА | 1992 |
|
RU2067052C1 |
| УСТРОЙСТВО ДЛЯ ПУСКА ДИЗЕЛЯ ТЕПЛОВОЗА | 1990 |
|
RU2009051C1 |
| Тяговый электропривод | 1984 |
|
SU1303455A1 |
| Устройство для регулирования скорости электроподвижного состава постоянного тока | 1989 |
|
SU1622186A1 |
| Устройство для управления асинхронным электродвигателем с фазным ротором | 1985 |
|
SU1259379A1 |
| УСТРОЙСТВО ДЛЯ ПУСКА ДИЗЕЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 1993 |
|
RU2062713C1 |
| УСТРОЙСТВО ДЛЯ ЗАЩИТЫ ОТ АВАРИЙНЫХ ТОКОВ РЕЗИСТОРОВ ОСЛАБЛЕНИЯ ВОЗБУЖДЕНИЯ ТЯГОВЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ ТЕПЛОВОЗА | 1994 |
|
RU2090387C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕМ КОМПРЕССОРА ТЕПЛОВОЗА | 1992 |
|
RU2031009C1 |
| ЭЛЕКТРОПРИВОД | 1992 |
|
RU2075819C1 |
/ / / 1
фуг. /
-ЕЭ
Ы i
