(54) СИСТЕМА УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА

| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ВОЕННОЙ ГУСЕНИЧНОЙ МАШИНЫ | 2012 |
|
RU2501700C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО СО ВСПОМОГАТЕЛЬНЫМ ДВИГАТЕЛЕМ | 2004 |
|
RU2294299C2 |
| Регулятор гидросистемы управления сельскохозяйственными орудиями | 1990 |
|
SU1764533A1 |
| Автомат для штамповки, надевания и обкатки алюминиевых колпачков на предварительно укупоренные картонным капсюлем бутылки | 1958 |
|
SU122685A1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ (ВАРИАНТЫ) | 2006 |
|
RU2312784C9 |
| ВЕЛОСИПЕД ДЛЯ ЕЗДЫ В ПОЛОЖЕНИИ ПОЛУЛЕЖА | 2003 |
|
RU2239578C1 |
| Автомат для мерной резки проводов и зачистки их концов от изоляции | 1983 |
|
SU1128321A1 |
| Вышивальная машина | 1980 |
|
SU1044696A1 |
| ЭЛЕКТРОПНЕВМАТИЧЕСКОЕ УСТРОЙСТВО УПРАВЛЕНИЯ ПРИВОДОМ ШАРОВЫХ КРАНОВ | 2006 |
|
RU2330192C1 |
| СПАРЕННАЯ УСТАНОВКА ДЛЯ ЗАПУСКА ЗЕНИТНЫХ РАКЕТ ИНДИВИДУАЛЬНОГО ПОЛЬЗОВАНИЯ | 1995 |
|
RU2088877C1 |
1
Изобретение относится к устройствам Для управления машинами и. может был применшо в пультах управления грузоподъемных и других многооперационных машин, в том числе лесозаготовительных.
Известна система управления транспортного средства, содержащая основной рычаг управления, установленный в корпусе посредством шарнира с двумя степенями свободы для раздельного перемещения в двух взаимно перпендикулярных плоскостях и его перемещения в плоскости, прЬмежуточной двум ynoMmtyibiM, и выполненный с элементами шарнириого соединения с передаточным устройством для перемещения управляющих элементов частн исполнигешиых механизмов транспортного средства в двух взаимно перпендикулярных плоскостях 1.
Цель изобретения - расширение функциональных возможностей системы управления транспортного средства.
Цель достигается тем, что система управления транспортного средства снабжена дополнительным рычагом управления и механизмом соединения его с основным рычагом, причем
на последнем установлен орган управления механизмом соединения, а на дополнительном рычаге выполнены дополнительные элементы шарнирного соединения с дополнительньпС передаточнымустройством, связанным с управляющимн элементами других исполнительных механизмов.
Каждое из передаточных устройств снабжаю подпружиненными компенсаторами изменения длины.
10
Кроме того, шартир выполнен с конусообразной впадиной для связи с соответствующей формы выступом механизма соединения
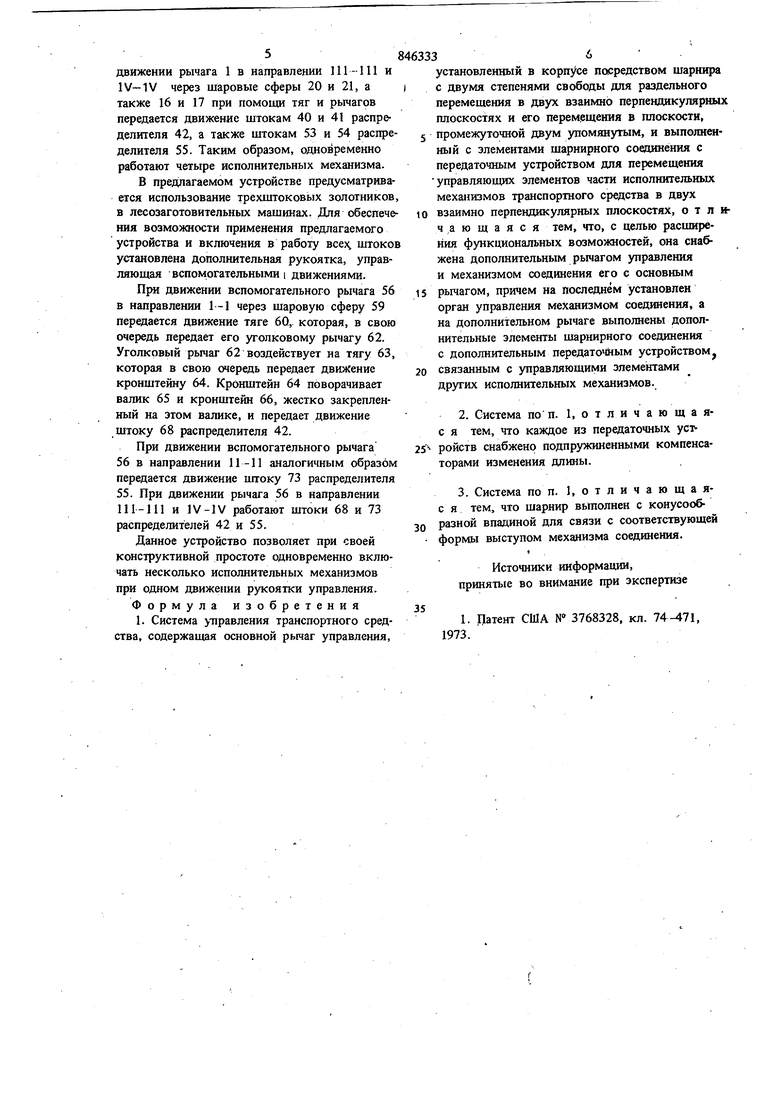
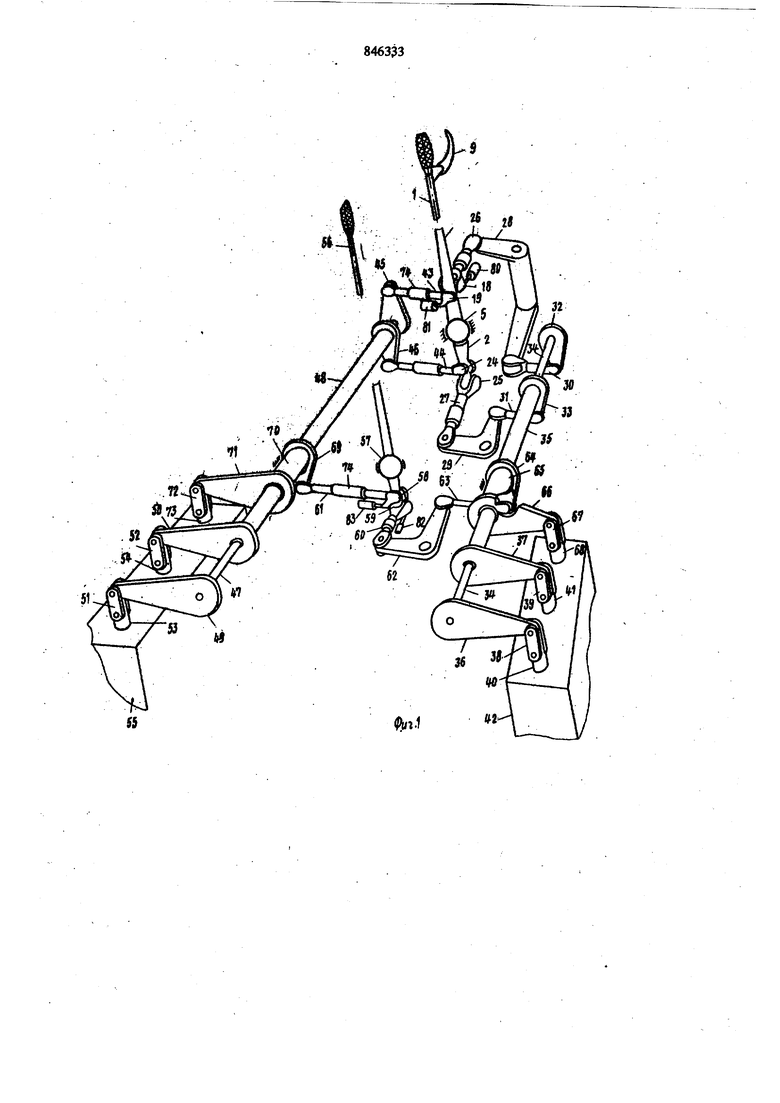
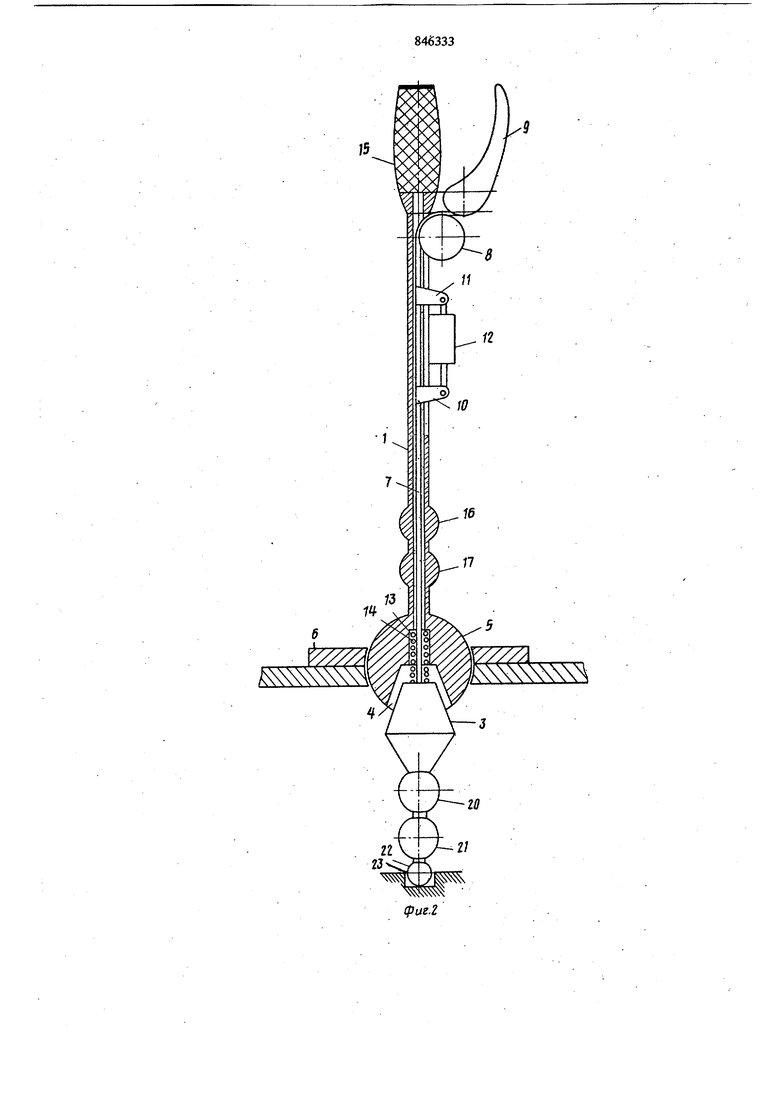
На фиг. 1 изображена система управления транспортного средства; на фиг. 2 - основной
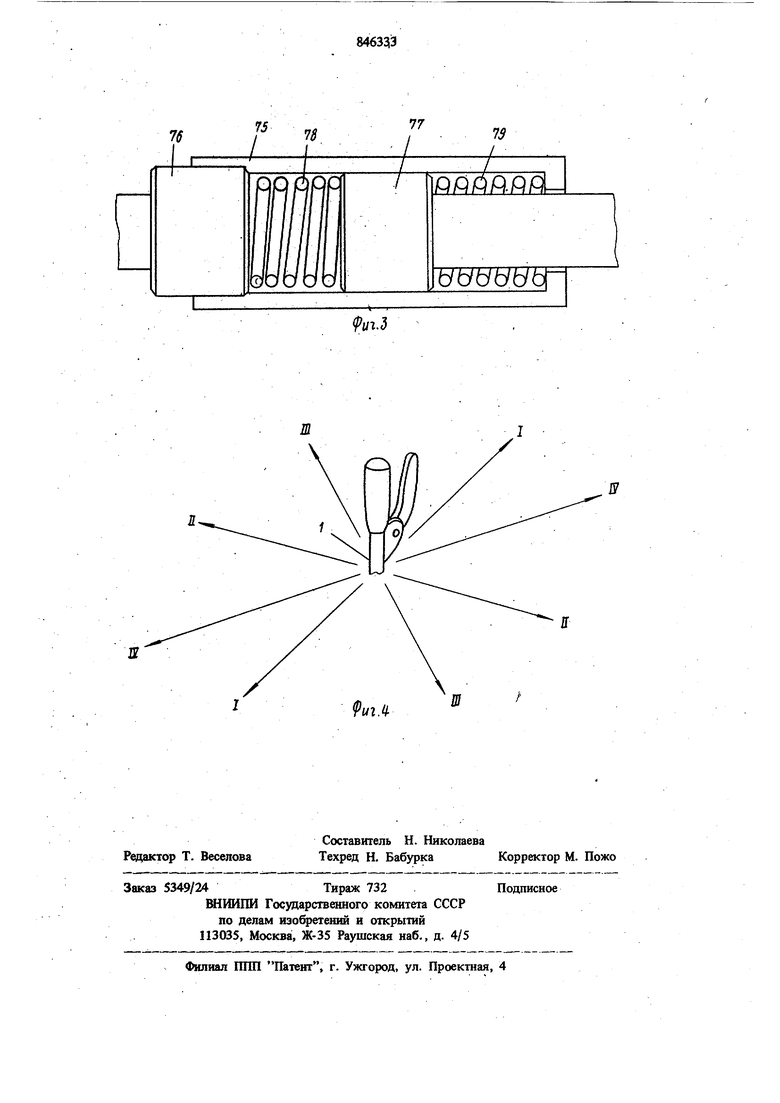
15 рычаг с механизмом соединений; на фиг. 3 - компенсащюнное устройство; на фиг. 4 схема движения рычага при включении механизмов.
Предлагаемое устройство для управления
20 мащиной содержит основной рычаг 1 и дополнительный рычаг 2, который своим наконечником 3 подвихсно установлен относительно рычага 1 в конусообразном углублении 4 шаровой опоры 5, закрепленной с возможностью поворота в разъемном подшнпнике 6, и соединен с рьиагом 1 посредством гибкой тяги 7, которая пропущена внутри рычага 1 и через обводной блок 8 соединена с рукояткой 9, шарнирнр закрепленной в верхней части рычага 1. Параллельно гибкой тяге 7 при помощи зажимов 10 и 11 закреплен усилитель 12. Конусообразное углубление 4 шаровой опоры 5 переходит в отверстие 13, в котором размещена прзокина 14, одним концом опирающаяся на наконечник 3 нижнего звена. Pbiчаг 1 содержит ручку 15 и две щаровые сферы 16 и 17 для крепления наконечников 18 и 19 кинематической цепи. Дополнительный рычаг 2 снабжен щаровыми сферами 2(Х-22, причем щаровая сфера 22 установлена в фиксирующем гнезде 23 корпуса транспортного средства, а к шаровым сферам 20 и 21 присоединены наконечники 24 и 25 других кинематических цепей Шаровые сферы 20 и 21, дополнительный рычаг 2 удалены от шаровой опоры 5 на больше расстояние, чем шаровые сферы 16 и 17 рычага 1. Кинематическая цепь крайних шаровых сфер 16 и 21 рьмага 1 состоит из тяг 26 и 27, соединенных с уголковыми рычагами 28 и 29, которые в свою очередь сьединены с тягами 30 и 31, связаш1ыми при помощи шарниров с кронштейнами 32 и 33, которые жестко закреплены на валиках 34 и 35. Другие концы валиков 35 и 34 содержат кронштейны 36 и 37, соединенные при помощи съемных щек 38 и 39 со штоками 40 и 41 распределителя 42. Кинематическая цепь внутренних 17 и 20 шаровых сфер рычага 1 состоит из тяг 43 к 44, соединенных при помощи шарниров с кронштейнами 45 и 46, жестко закрепленных на валиках 47 и 48, на других концах которых также жестко закреплены кронштейны 49 и 50, соединенные при помощи съемных щек 51 и 52 со штоками 53 и 54 распределителя 55. Для увеличения количества включаемых механизмов в устройстве для управления манш ной применен дополнительный рычаг 56, установле1шый в шаровой опоре 57. Рукоятка 56 содержит две шаровые сферы 58 и 59 для подсоединения тяг 60 и 61. Тяга 60 при помо щи уголкового рьиага 62 и тяги 63 соединена с кронштейном 64, жестко закрепленным на полом валике 65 другой конец которого со-1 держит кронштейн 68, шарнирно соединенный при помощи съемных щек 67 со штоком 68 распределителя 42. Тяга 61 соединена с кронштейном 69, закрепленном на полом валике 70, имеющем на другом конце кронштейн 71, соединенный при помощи съемных щек 72 со штоком 73 распределителя 55. Каждая тяга кинематической цепи содержит компенсационно устр(йство 74 (фиг. 3), которое состоит из 4 орпуса 75, в котором установлены наконечики 76 и 77. Между наконечниками 76 и Ti яг и корпусом 75 компенсационного устройтва установлены пружины 78 и 79. К накоечникам тяг 26 и 43, а также 60 и 61, взаиодейств зющими с шаровыми сферами 16 и 17 и 58 и 59 соответственно подсоединены силители 80 и 81, 82 и 83. Устройство работает следующим образом. Оператор передвигает рукоятку 1 управления в направлении L Через шаровую сферу 16 сообщается тяга 26, которая в свою очередь поворачивает уголковый рычаг 28. Уголковый рьмаг 28 передает движение тяге 30 и связанному с ней кронштейну 32, который в свою очередь поворачивает валик 34, а соответственно с ним и кронштейн 36. Кронштейн 36 передает движение штоку 40 распределителя 42. При движении рычага 1 в направлении П-11 через шаровую сферу 17 и кинематическую цепь аналогичным образом передается движение штоку 53 распределителя 55. При движении рычага в направлении Ш -Ш и 1У-1У передается движение через шаровые сферы 16 н 17 и кинематические цепи одновременно штоками 40 и 53 распределителей 42 и 55, чем обеспечивается одновременная работа двух дополнительных механизмов. Оператор нажимает на рукоятку 9. Усилием от рукоятки 9 и при помоши усилителя 12, воздействующего на гибкую тягу 7, преодолевают сопротивление пружины 14, и наконечник 3 дополнительного рычага 2 затягивается в конусообразное углубление шаровой опоры 5. Одновременно шаровая сфера 22 выходит из фиксирзющего гнезда 23 корпуса маишны. При движении рычага 1 в направлении 1-1 через шаровую сферу 21 передается движение тяге 27, которая в свою очередь сообщает движение уголковому рычагу 29. Уголковый рычаг 29 сообщает движение тяге 31, которая при помощи крсжштейна 33 поворачивает валик 35. Валик 35 в свою очередь поворачивает жестко закрепленный на нем кронштейн 37, который приводит в движение шток 41 распределителя 42. Аналогичным образом через шаровую сферу 16сообщается движение штоку 40 распределителя 42. Поскольку шаровые сферы 20 и 21 дополнительного рычага 2 рычага 1 расположены от центра вращения шаровой опоры 5 на расстоянии больщем, чем шаровые сферы 16 и 17рычага 1, то кинематическая цепь начинает движение после окончания движения кинематической цепи дополнительного рьиага 2. При движении рычага I с рукояткой 9 в направлении 11-11 аналогичным образом срабатывают штоки 53 и 54 распределителя 55. При
движении рычага 1 в направлении 111 --111 и IV-IV через шаровые сферы 20 и 21, а также 16 и 17 при помощи тяг и рычагов передается движение штокам 40 и 41 распределителя 42, а также штокам 53 и 54 распределителя 55. Таким образом, одновременно работают четыре исполнительных механизма.
В предлагаемом устройстве предусматривается использование трехштоковых золотников в лесозаготовительных машинах. Для обеспечения возможности применения предлагаемого устройства и включения в работу все штоков установлена дополнительная рукоятка, управляюшая вспомогательными i движениями.
При движении вспомогательного рычага 56 в направлении 1-1 через шаровую сферу 59 передается движение тяге 60, которая, в свою очередь передает его уголковому рычагу 62. Уголковый рычаг 62 воздействует на тягу 63, которая в свою очередь передает движение кронштейну 64. Кронштейн 64 поворачивает валик 65 и кронштейн 66, жестко закрепленный на зтом валике, и передает движение штоку 68 распределителя 42.
При движении вспомогательного рычага 56 в направлении 11-11 аналогичным образом передается движение штоку 73 распределителя 55. При движении рычага 56 в направлении 111-111 и 1V-1V работают штоки 68 и 73 распределителей 42 и 55.
Данное устройство позволяет при своей конструктивной простоте одновременно включать несколько исполнительных механизмов при одном движении рукоятки управления. Формула изобретения
установленный в корпусе посредством шарнира с двумя степенями свободы для раздельного перемещения в двух взаимно перпендикулярных плоскостях и его перемещения в плоскости, промежуточной двум упомянутым, и выполненный с элементами шарнирного соединения с передаточным устройством для перемещения управляющих элементов части исполнительных механизмов транспортного средства в двух
взаимно перпендикулярных плоскостях, отличающаяся тем, что, с целью расширения функциональных возможностей, она снабжена дополнительным рьиагом управления и механизмом соединения его с основным
рычагом, причем на последнем установлен орган управления механизмом соединения, а на дополнительном рычаге выполнены дополнительные элементы шарнирного соединения с дополнительным передаточным устройством
связанным с управляющими элементами других исполнительных механизмов.
Источники информации, принятые во внимание при экспертизе
76
77
73
Р/ / АРДUUUUUb
