1
Изобретение относится к акустическим измерениям и может быть использовано в различных отраслях народного, хозяйства для измерения скорости потоки, в ультразвуковых измерителях 5 скорости потока при контроле за ходом технологических процессов и управления динамической скоростью потоков. . .
известен ультразвуковой Способ из- 0 мерения скорости потока, основанный на зондировании потока ультразвуковыми импульсными сигналами, один из которых излучают в направлении потока, а другой излучают против направления 15 потока, причем.скорость потока определяют по разности частот высокочастотных колебаний, заполняющих зон-, дирующие импульсы tl .
Однако этот спосо:б не може.т быть 20 использов-ан для измерения скорости турбулентных потоков, содержащих газовые пузырьки и твердые частицы изза быстрой и .глубокой мультипликативной помехи, вызываемой потоком 25 и приводящей к грубым погрешностям измерения.
Наиболее близким по технической сущности к предлагаемому является ультразвуковой способ измерения ско- ЗО
потока, основанный на зондировании исследуемого потока ультразвуковыми импульсами, один из которых излучают в направлении потока,.а другой - против Направления потока, приеме прошеда1их через иccлeдye вJIft поток импульсов и определении величины скорости потока по разности величин, обратных полученным значениям времен задержек ультра.звуковых импульсов, прошедамх исследуемый поток в направлении потока и против него Г2.
однако -В данном способе быстроизменяющееся затухание ультразвуко-. вых импульсов, в турбулентных потоках, содержащих твердые частицы и пузырьки газов, приводит к быстрой мультипли.кативной помехе, которгш вызываетсрывы и грубые погрешности измерения, достигающие несколько сотен процентов от измеряемой скорбсти,
Цельизобретения - увеличение точности измерений и обеспечение возможности измерений в турбулентных потоках, содержащих частицы твердых тел и газовые-пузырьки.
Поставленная цель достигается тем, что в соответствии со способом
перед излучением несущую частоту зондирующих ультразвуковых импульсов манипулируют по бинарному закону, параллельно спектр зондирующих импульсов предыскажают, затем прошелиие через исследуемый.поток импульсы и предыскаженные импульсы ограничивают по амплитуде и детектируют, причем по каждому из направлений зондирования время задержки ультразвукового импульса определяют по времени между линиями симметрии принятого ультразвукового импульса и .предыскаженного зондирующего импульса.
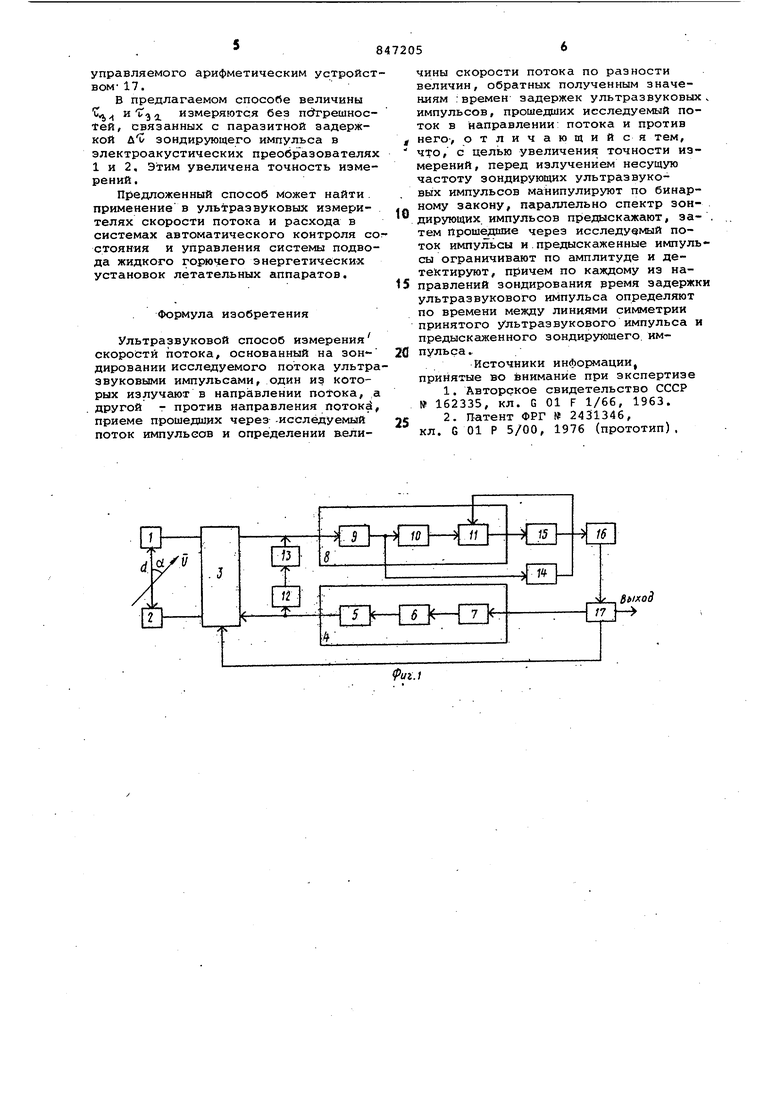
На фиг. 1 представлена упрощенная блок-схема устройства, реализующего Предлагаемый способ; на фиг. 2 временные диаграммы.
В блок-схему входят два идентичных обратимых электроакустических преобразователя 1 и 2, помещенных JB исследуемый поток, вектор скорости V которого составляет угол базой d между преобразователями 1 и 2, коммутатор 3 направления излучения, передатчик 4, состоящий, например, из усилителя мощности 5, частотного модулятора б и блока 7 формирования манипулирующих импульсов, приемник 8 обнаружения сигналов состоящий, например., из усилителя 9, порогового устройства 10 и ключа 11, фильтр 12 предыскажения, аттенюатор 13, .ограничитель 14, частотный детектор 15, формирователь 16 и арифметическое устройство 17.
Сущность предлагаемого способа заклк)чается в том, что зондирующий сигнал Ugjii j- (t) (фиг. 2) на выходе передатчика 4 формируют бинарной манипуляцией несущего колебания. Манипуляцию осуществляют преобразованием ,& блоке 7 входного импульса йyz () (фиг. 2), поступающего из арифметического устройства 17, в манипулирующие импульсы U g,,,- (t). Этими импульсами в частотном манипуляторе б манипулируют частоту несу.щего колебания.таким образом, что до момента t., внутри импульса U gf,, 5 () генерируется колебание с частотой f., ,а после Момента t. с частотой f, причем . uf f - f-1 foi где fo частота настройки электроакустических преобразователей 1 и 2. Выходной .импульс Ufee,iiy(t) передатчика 4 одновременно подводят к коммутатору 3 и, через фильтр 12 и аттенюатор 13, ко входу приемника 8. Комплексная функция передачи ) фильтра 12 установлена и.з условия (jit)( jw) где К (j ш) К , (j ш) - комплексные характеристики передачи электроакустических преобразователей- 1 и 2, Поэтому линия симметрии выходного импульсй Увыша - фильтра 12 претерпевает задержку д , равную суммарной .паразитной задержке зондирующего сигнала в электроакустических преобразрвтелях 1 и 2, Импульс U(,,) аттенюаторе 13 ослабляют до уровня, не перегружающего приемник В.,пропускают через усилитель 9, 6граничитель 14.. ,с уровнем ограничения U (фиг, 2), ключ 11, который эамыкс ется выходным импульсом порогового устройства 10 с порогом обнаружения и при превышении сигналом порога и„ а также через частотный детектор 15, линия симметрии выходного импульса U,.(t) которого пересекает ось вращения в момент t., ,
Ультразвуковой зондирующий сигнал прошедший через исследуемый поток за время f (фиг. 2)пропускают через цепи приемника 8 аналогичным способом. Энергию зондирующего ультразвукового импульса устанавливают такой,.чтобы при работе с потоком, содержащим твердые частицы или газовые пузырьки, а также с турбулентным потоком, приводящих к флуктуациям амплитуды принимаемого импульса, амплитуда принимаемого импульса U на входе блока 14 превышала порог DO, т.е. UTJ UQ с заданной вероятностью. При этом линия симметрии принятого импульса на выходе частотного детектора 15 пересекает ось времени в момент t,j независимо от вели-, чины амплитуды принятого импульса (фиг. 2), а временной интервал-между осямч симметрии предыскаженного зондирующего импульса и принятого
- (t -ut)
«Clj., т.е.
импульса t
paвен задержке ультразвукового импульса в исследуемом потоке, причем величина f не зависит от затухания зондирующего ультразвукового импульса в потоке. Этим обеспечена возможность измерений в турбулентных пО токах, содержащих частицы твердых тел и газовые пузырьки.
Величинуt измеряют и запоминают в арифметическом устройстве 17, работающем по алгоритму
М - выходная величина
арифметического уст.ройства 17;
К - постоянный коэффидил eHTj
задержка ультразвуко i- C+VCOSd:вого сигнала в потоке при излучении в направлении потокаj с - скорость ультразвука в потоке; i V - измеряемая скорость , потока C-YcoscL задержка ультразвукового сигнала в потоке при излучении против направления потока.
Коммутацию направления излучения осуществляют с помощью коммутатора з,
управляемого арифметическим устройством- 17.
В предлагаемом cnocofie величины и . измеряются без пдгрешносТей, связанных с паразитной задержкой Ди зондирующего импульса в электроакустических преобразователях 1 и 2. Этим увеличена точность измерений.
Предложенный способ может найти . применение в ультразвуковых измерителях скорости потока и расхода в системах автоматического контроля состояния и управления системы подвода жидкого горючего энергетических установок летательных аппаратов.
Формула изобретения
Ультразвуковой способ измерения скорости потока, основанный на зон дировании исследуемого потока ультразвуковыми импульсами, один из которых излучают в направлении потока, а другой - против направления потоки, приеме прошедших через -исследуемый поток импульсов и определении величины скорости потока по разности величин, обратных полученным значениям .времен задержек ультразвуковых импульсов, прошедших исследуемый поток в направлении; потока и против f него-, отличающийся тем, что, с целью увеличения точности измерений , перед излучением несущую частоту зондирующих ультразвуковых импульсов манипулируют по бинарному закону, параллельно спектр зон0дирующих импульсов предыскажают, за- . тем прошедшие через исследуемый поток импульсы и.предыскаженные импульсы ограничивают по амплитуде и детектируют, причем по каждому из направлений зондирования время задержки ультразвукового импульса определяют по времени между линиями симметрии принятого ультразвукового импульса и предыскаженного зондирующего, им0пульса..
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР 162335, кл. G 01 F 1/66, 1963.
2.П-атент ФРГ 2431346,
5
кл. G 01 Р 5/00, 1976 (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Корреляционный измеритель скорости потока | 1978 |
|
SU735922A1 |
| Устройство для измерения затухания ультразвуковых волн | 1979 |
|
SU871058A1 |
| Ультразвуковой измеритель скорости течений | 1981 |
|
SU987393A1 |
| СПОСОБ УЛЬТРАЗВУКОВОГО ИЗМЕРЕНИЯ ПАРАМЕТРОВ ЖИДКОСТНОГО ПОТОКА | 2023 |
|
RU2830296C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РАСХОДА КОМПОНЕНТОВ ДВУХФАЗНОГО ПОТОКА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2339915C1 |
| Акустический способ и устройство измерения параметров морского волнения | 2019 |
|
RU2721307C1 |
| Устройство для измерения скорости распространения ультразвуковых колебаний | 1990 |
|
SU1820230A1 |
| Способ исследования геометрических параметров каверны подземного хранилища газа | 2017 |
|
RU2660307C1 |
| УЛЬТРАЗВУКОВОЙ МИКРОСКОП | 2011 |
|
RU2451291C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ДВИЖУЩИХСЯ ЦЕЛЕЙ В ГИДРОЛОКАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2357269C2 |

