Изобретение относится к области гидроакустики, а именно к гидролокации, и может быть использовано для обнаружения в активном режиме движущихся подводных целей, особенно предпочтительно его использование для акустического мониторинга океанов, морей и внутренних водоемов с целью обнаружения нарушителей в экономической зоне страны.
Известен способ селекции движущихся целей (патент РФ №2058033, МПК G01S 15/00, опубликован 10.04.1996), основанный на облучении исследуемого объема пространства (исследуемой акватории) сигналом с гиперболической частотной модуляцией (ГЧМ), приеме отраженного эхосигнала цели, измерении разности фаз излученного и отраженного ГЧМ сигналов, вычислении радиальной скорости целей по известной скорости звука в среде и разности фаз и принятии решения по результатам сравнения радиальных скоростей целей.
Данный способ позволяет повысить разрешающую способность по радиальной скорости движущихся целей при излучении ГЧМ сигналов. Однако, поскольку этот способ основан на сравнении радиальных скоростей целей, в исследуемом объеме пространства (исследуемой акватории) должна быть хотя бы одна цель с априори известной нулевой радиальной скоростью. Либо должно быть известно точное значение скорости звука по пути распространения излученного и отраженного сигналов, что приводит к увеличению времени обнаружения.
Известен способ обнаружения движущегося объекта в океане (патент РФ №2127890, МПК G01S 15/52, опубликован 20.03.1999), принятый за прототип, заключающийся в последовательном облучении контролируемой области акватории океана акустическими импульсами, приеме в удаленной точке рассеянных объектом и искаженных средой импульсов, выделении временной последовательности импульсов, соответствующих разным путям их распространения в среде, и определении разности между двумя последовательно принятыми сигналами, по которой обнаруживают движущийся объект. В данном способе обнаруживают движущиеся объекты за счет того, что используют изменения в передаточной функции среды при анализе разности двух интерференционных картин в многолучевом акустическом поле, полученных последовательно через некоторый промежуток времени.
Такой способ имеет ряд недостатков. Для обнаружения слабых полезных сигналов на фоне мешающих отражений и реверберации необходима высокая точность измерения временных задержек для разделения сигналов, распространяющихся по различным траекториям-лучам, так как эффективность применяемого метода спектрометрии временных задержек обусловлена высокоточной синхронизацией излучающей и приемной систем. Для определения динамики движения объекта длительность серий импульсов акустического облучения необходимо согласовывать с длиной трассы движения объекта, а для эффективного обнаружения слабоотражающих объектов требуется согласование частоты следования импульсов с пространственно-временными характеристиками объектов, что может увеличить время обнаружения. Кроме этого, при мониторинге больших областей акватории недостатком является необходимость производить прием рассеянного объектом и искаженного средой импульса в нескольких точках акватории, распределенных с шагом, согласованным с радиусом обнаружения объекта, что приводит к увеличению времени обнаружения.
Известно устройство обнаружения движущихся целей (патент РФ №2058033, МПК G01S 15/00, опубликован 10.04.1996), которое содержит генератор гиперболического частотно-модулированного (ГЧМ) сигнала, излучатель, приемник с блоком АЦП, рециркуляционные линии задержки, умножители, фазовращатель, вычислители и соответствующие соединения.
Недостатком данного устройства является необходимость определения точного значения скорости звука по пути распространения излученного и отраженного сигналов либо сравнения радиальных скоростей целей, причем скорость одной из них должна быть известна. Такие измерения приводят к увеличению времени обнаружения.
Известно устройство обнаружения селекции движущихся целей в гидролокации (патент США №4084148, МПК G01S 7/52, опубликован 11.04.1978), принятое за прототип, содержащее генератор излучаемых импульсов, излучатель, приемник и арифметико-логическое устройство (АЛУ), которое содержит один умножитель, один вычислитель, первый и второй блоки прямого преобразования Фурье, один блок обратного преобразования Фурье и следующие соединения: выход генератора связан с излучателем и с входом первого блока прямого преобразования Фурье; выход первого блока прямого преобразования Фурье соединен с входом вычислителя; выход вычислителя соединен с первым входом умножителя; выход приемника соединен с входом второго блока преобразования Фурье; выход второго блока преобразования Фурье соединен со вторым входом умножителя; выход умножителя соединен с блоком обратного преобразования Фурье, выход которого является выходом устройства.
Недостатком данного устройства является невозможность осуществить селекцию движущейся цели, используя один импульс зондирования, то есть требуется большее время, равное нескольким периодам зондирования.
Технической задачей изобретения является уменьшение времени обнаружения.
Поставленная задача достигается тем, что предлагается способ селекции движущихся целей в гидролокации, заключающийся в последовательном облучении контролируемой области акватории водного пространства акустическими импульсами, приеме рассеянных объектом и искаженных средой импульсов, алгоритмической совместной обработке посланных и принятых сигналов, причем в пределах одного излучаемого импульса применяют периодический закон частотной модуляции, принимаемый сигнал сжимают в фильтре, согласованном с одним периодом внутриимпульсной частотной модуляции, преобразуют сжатый сигнал путем задержки на время одного периода внутриимпульсной модуляции и вычитания задержанного сигнала из своей незадержанной копии, преобразованный сжатый сигнал подвергают когерентному накоплению за время длительности зондирующего импульса с учетом ожидаемых значений времени прихода отраженного сигнала и доплеровской частоты обнаруживаемой цели, выделяют огибающую накопленного сигнала, формируют набор огибающих для различных значений времени прихода и доплеровской частоты и по сформированному набору получают информацию о наличии и характере движущейся цели с использованием известных и/или специальных алгоритмов.
Устройство для реализации предлагаемого способа содержит генератор излучаемых импульсов, первый и второй формирователи опорного сигнала, излучатель, приемник и арифметическо-логическое устройство, при этом арифметическо-логическое устройство содержит: первый и второй блоки задержки, первый и второй блоки вычитания, первый, второй и третий умножители, первый, второй и третий вычислители, первый, второй и третий блоки прямого преобразования Фурье и блок обратного преобразования Фурье со следующими соединениями: выход генератора соединен с входом первого формирователя опорного сигнала, с излучателем и с входом второго формирователя опорного сигнала. Первый формирователь опорного сигнала связан с первым входом второго блока вычитания непосредственно, а со вторым его входом - через второй блок задержки; выход второго блока вычитания соединен с входом третьего блока прямого преобразования Фурье, выход которого соединен со вторым входом второго умножителя; выход приемника соединен с первым входом первого блока вычитания непосредственно, а со вторым его входом - через первый блок задержки; выход второго формирователя опорного сигнала соединен с входом первого блока прямого преобразования Фурье, выход которого через первый вычислитель соединен с первым входом первого умножителя и с первым входом второго умножителя. Второй вход первого умножителя связан с выходом первого блока вычитания через второй блок прямого преобразования Фурье; выход первого умножителя соединен с первым входом третьего умножителя, второй вход которого соединен с выходом второго блока умножителя через второй вычислитель; выход третьего умножителя соединен с входом блока обратного преобразования Фурье, который соединен с входом третьего вычислителя. Выход третьего вычислителя является выходом устройства.
На чертеже изображена структурная схема устройства по заявленному способу.
Устройство содержит: 1 - генератор, 2 и 3 - первый и второй формирователи опорного сигнала соответственно, 4 - излучатель, 5 - приемник, 6 и 7 - первый и второй блоки задержки соответственно, 8 и 9 - первый и второй блоки вычитания соответственно, 10, 11 и 12 - первый, второй и третий блоки прямого преобразования Фурье соответственно, 13, 14 и 15 - первый, второй и третий вычислители соответственно, 16, 17и 18 - первый, второй и третий умножители соответственно, 19 - блок обратного преобразования Фурье.
Схема имеет следующие соединения: выход генератора 1 соединен с входом первого формирователя опорного сигнала 1, с излучателем 4 и с входом второго формирователя опорного сигнала 3. Первый формирователь опорного сигнала 2 связан с первым входом второго блока вычитания 9 непосредственно, а со вторым его входом - через второй блок задержки 7; выход второго блока вычитания 9 соединен с входом третьего блока прямого преобразования Фурье 12, выход которого соединен со вторым входом второго умножителя 17; выход приемника 5 соединен с первым входом первого блока вычитания 8 непосредственно, а со вторым его входом - через первый блок задержки 6; выход второго формирователя опорного сигнала 3 соединен с входом первого блока прямого преобразования Фурье 10, выход которого через первый вычислитель 13 соединен с первым входом первого умножителя 16 и с первым входом второго умножителя 17. Второй вход первого умножителя 16 связан с выходом первого блока вычитания 8 через второй блок прямого преобразования Фурье 11; выход первого умножителя 16 соединен с первым входом третьего умножителя 18, второй вход которого соединен с выходом второго блока умножителя 17 через второй вычислитель 14; выход третьего умножителя 18 соединен с входом блока обратного преобразования Фурье 19, выход которого соединен с входом третьего вычислителя 15. Выход третьего вычислителя 15 является выходом устройства.
Предлагаемое устройство работает следующим образом. Генератор 1 формирует зондирующий сигнал U(t) в виде импульса с внутриимпульсной периодической ЛЧМ:
 , 0<t<T,
, 0<t<T,
где

Т - длительность зондирующего импульса,
Тэ - длительность одного периода модуляции,
N - количество периодов модуляции в одном зондирующем импульсе,
ω0 - центральная частота спектра ЛЧМ,
Δω - девиация ЛЧМ в одном периоде модуляции.
Сформированный генератором 1 сигнал U(t) излучается в водную среду излучателем 4. Отраженный от движущегося объекта сигнал поступает на приемник 5. Далее сигнал Uвх(t) задерживается с помощью первого блока задержки 6 на время Тэ и вычитается из своей незадержанной копии на первом блоке вычитания 8:
 .
.
Во втором блоке прямого преобразования Фурье - БППФ 11 вычисляются отсчеты спектра F(ω) сигнала U1(t). Второй формирователь опорного сигнала 2 формирует сигнал Uэ(t), который поступает в первый блок БППФ 10, где вычисляются отсчеты его спектра Fэ(ω), далее эти отсчеты поступают на первый вычислитель 13, где вычисляются отсчеты комплексно-сопряженного спектра F1 э(ω). В первом блоке умножитель 16 вычисляется произведение между отсчетами спектра F(ω) эхосигнала U1(t) и отсчетами спектра F1 э(ω) сигнала Uэ(t).
Сформированный первым формирователем опорного сигнала 2 сигнал U(t, Ωc) поступает на второй блок задержки 7, где сигнал задерживается на время Тэ и вычитается из своей незадержанной копии на втором блоке вычитания 9:
 .
.
В третьем блоке прямого преобразования Фурье - БППФ 12 вычисляются отсчеты спектра F1(ω, Ωc) сигнала UII(t, Ωc), поступающего с второго блока вычитания 9. Далее во втором блоке умножителя 17 вычисляется произведение между отсчетами спектра F1(ω, Ωc) преобразованного опорного сигнала UII(t, Ωc) и отсчетами спектра F1 э(ω) сигнала Uэ(t).
Во втором вычислителе 14 вычисляются отсчеты комплексно сопряженного спектра F1 1(ω, Ωc) сигнала, поступившего с выхода второго умножителя. В третьем блоке умножителя 18 вычисляется произведение между отсчетами с выхода блока первого умножителя 16 и отсчетами с выхода второго вычислителя 14. В блоке обратного преобразования Фурье - БОПФ 19 вычисляются отсчеты комплексной функции обратного преобразования Фурье. Далее в блоке третьего вычислителя 15 вычисляется модуль комплексной функции Uвых(tс, Ωc) отсчеты которой поступают с выхода блока БОПФ 19.
Далее формируют набор огибающих для различных значений времени прихода и доплеровской частоты и по сформированному набору получают решение о наличии цели с использованием известных алгоритмов.
Расчеты показывают, что предложенным способом можно повысить отношение сигнал/помеха на 10-33 дБ как при неподвижных мешающих отражателях, так и при флуктуирующих с небольшой скоростью.
Необходимо отметить, что предлагаемый способ реализуется независимо от методов облучения исследуемого объема пространства. То есть может быть выполнено ненаправленное (или секторное) излучение и прием на направленную антенну в некотором телесном угле, в котором осуществляется селекция по времени (по дистанции). Либо может быть выполнено направленное излучение в узком телесном угле и прием на ненаправленный приемник с последующей селекцией во времени. Также может быть выполнено направленное излучение и секторный прием или наоборот.
Дополнительными преимуществами предлагаемого способа можно назвать его универсальность, он может быть реализован как для ГЧМ сигналов, так и для сигналов с линейной частотной модуляцией (ЛЧМ), и простоту внедрения в существующие системы на программном уровне. Предлагаемый способ позволяет значительно уменьшить время обнаружения без существенного увеличения объема обрабатываемой информации и, следовательно, без ужесточения требований к вычислительным ресурсам гидролокационных систем.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ С ИЗМЕРЕНИЕМ ДАЛЬНОСТИ, РАДИАЛЬНОЙ СКОРОСТИ И НАПРАВЛЕНИЯ ДВИЖЕНИЯ | 2016 |
|
RU2626380C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2005 |
|
RU2283505C1 |
| УСТРОЙСТВО ЦИФРОВОЙ ОБРАБОТКИ СИГНАЛОВ В ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РЛС С КОМПЕНСАЦИЕЙ МИГРАЦИЙ ЦЕЛЕЙ ПО ДАЛЬНОСТИ И ЧМ ДОПЛЕРОВСКИХ СИГНАЛОВ ЗА ОДИН ПЕРИОД ИЗЛУЧЕНИЯ И ПРИЕМА ПАЧКИ РАДИОИМПУЛЬСОВ | 2022 |
|
RU2800494C1 |
| УСТРОЙСТВО ЦИФРОВОЙ ОБРАБОТКИ СИГНАЛОВ В ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РЛС С КОМПЕНСАЦИЕЙ ЧМ ДОПЛЕРОВСКИХ СИГНАЛОВ ЗА ОДИН ПЕРИОД ИЗЛУЧЕНИЯ И ПРИЕМА ПАЧКИ РАДИОИМПУЛЬСОВ | 2021 |
|
RU2782574C1 |
| УСТРОЙСТВО ЦИФРОВОЙ ОБРАБОТКИ СИГНАЛОВ В ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РЛС С КОМПЕНСАЦИЕЙ ЧМ ДОПЛЕРОВСКИХ СИГНАЛОВ | 2017 |
|
RU2657462C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2009 |
|
RU2419106C1 |
| УСТРОЙСТВО НЕЛИНЕЙНОГО ПОДАВЛЕНИЯ РЕТРАНСЛИРОВАННЫХ ПОМЕХ | 2007 |
|
RU2360360C1 |
| СПОСОБ ОБРАБОТКИ СИГНАЛА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2409822C1 |
| СПОСОБ ПЕЛЕНГАЦИИ РАДИОСИГНАЛОВ И ПЕЛЕНГАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2419805C1 |
| РАДИОИНТРОСКОП | 1996 |
|
RU2084876C1 |
Изобретение относится к области гидроакустики и может быть использовано для акустического мониторинга океанов, морей и внутренних водоемов с целью обнаружения нарушителей в экономической зоне страны и т.п. Способ обнаружения движущихся целей в гидролокации заключается в последовательном облучении контролируемой области акватории океана акустическими импульсами, приеме рассеянных объектом и искаженных средой импульсов, алгоритмической совместной обработке посланных и принятых сигналов, при этом в пределах одного излучаемого импульса применяют периодический закон частотной модуляции, принимаемый сигнал сжимают в фильтре, согласованном с одним периодом внутриимпульсной частотной модуляции, преобразуют сжатый сигнал путем задержки на время одного периода внутриимпульсной модуляции и вычитания задержанного сигнала из своей не задержанной копии, преобразованный сжатый сигнал подвергают когерентному накоплению за время длительности зондирующего импульса с учетом ожидаемых значений времени прихода отраженного сигнала и доплеровской частоты обнаруживаемой цели, выделяют огибающую накопленного сигнала, формируют набор огибающих для различных значений времени прихода и доплеровской частоты и по сформированному набору получают информацию о наличии и характере движущихся целей с использованием известных и/или специальных алгоритмов. Технический результат: уменьшение времени обнаружения. 2 н.п. ф-лы, 1 ил.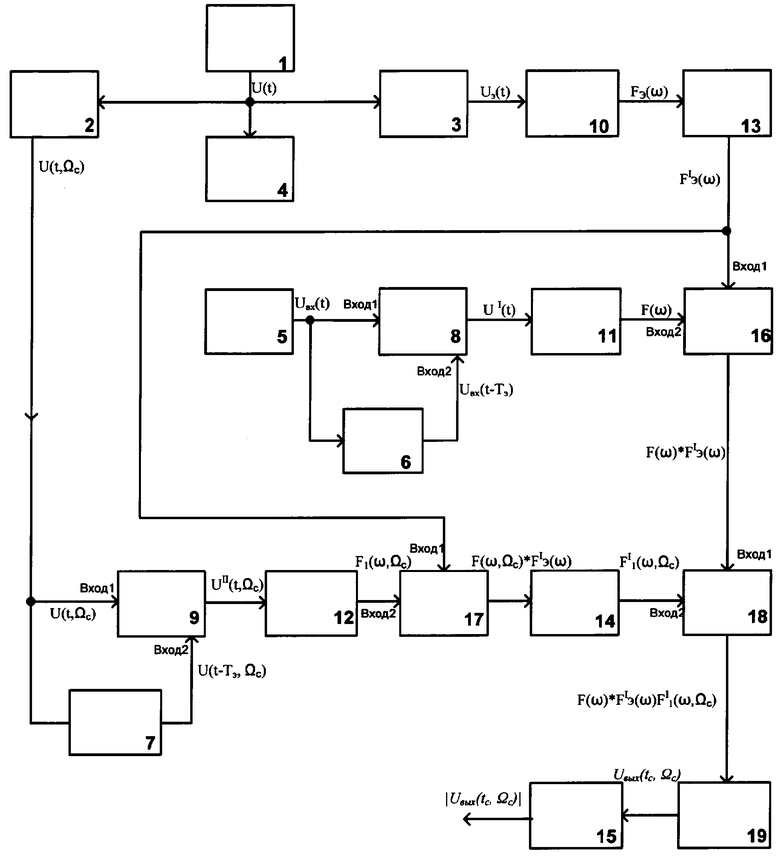
1. Способ обнаружения движущихся целей в гидролокации, заключающийся в последовательном облучении контролируемой области акватории океана акустическими импульсами, приеме рассеянных объектом и искаженных средой импульсов, алгоритмической совместной обработке посланных и принятых сигналов, отличающийся тем, что в пределах одного излучаемого импульса применяют периодический закон частотной модуляции, принимаемый сигнал сжимают в фильтре, согласованном с одним периодом внутриимпульсной частотной модуляции, преобразуют сжатый сигнал путем задержки на время одного периода внутриимпульсной модуляции и вычитания задержанного сигнала из своей не задержанной копии, преобразованный сжатый сигнал подвергают когерентному накоплению за время длительности зондирующего импульса с учетом ожидаемых значений времени прихода отраженного сигнала и доплеровской частоты обнаруживаемой цели, выделяют огибающую накопленного сигнала, формируют набор огибающих для различных значений времени прихода и доплеровской частоты и по сформированному набору получают информацию о наличии и характере движущейся цели с использованием известных и/или специальных алгоритмов.
2. Устройство селекции движущихся целей в гидролокации, содержащее генератор излучаемых импульсов, излучатель, приемник и арифметическо-логическое устройство, отличающееся тем, что в него введены первый и второй формирователи опорного сигнала и арифметическо-логическое устройство, включающее первый и второй блоки задержки, первый и второй блоки вычитания, первый, второй и третий умножители, первый, второй и третий вычислители, первый, второй и третий блоки прямого преобразования Фурье и блок обратного преобразования Фурье, при этом выход генератора соединен с входом первого формирователя опорного сигнала, с излучателем и с входом второго формирователя опорного сигнала, первый формирователь опорного сигнала связан с первым входом второго блока вычитания непосредственно, а со вторым его входом - через второй блок задержки, выход второго блока вычитания соединен с входом третьего блока прямого преобразования Фурье, выход которого соединен со вторым входом второго умножителя, выход приемника соединен с первым входом первого блока вычитания непосредственно, а со вторым его входом - через первый блок задержки, выход второго формирователя опорного сигнала соединен с входом первого блока прямого преобразования Фурье, выход которого через первый вычислитель соединен с первым входом первого умножителя и с первым входом второго умножителя, второй вход первого умножителя связан с выходом первого блока вычитания через второй блок прямого преобразования Фурье, выход первого умножителя соединен с первым входом третьего умножителя, второй вход которого соединен с выходом второго блока умножителя через второй вычислитель, выход третьего умножителя соединен с входом блока обратного преобразования Фурье, который соединен с входом третьего вычислителя, выход которого является выходом устройства.
| СПОСОБ ОБНАРУЖЕНИЯ ДВИЖУЩЕГОСЯ ОБЪЕКТА В ОКЕАНЕ | 1997 |
|
RU2127890C1 |
| RU 2058033 C1, 10.04.1996 | |||
| СПОСОБ СЕЛЕКЦИИ НАДВОДНЫХ ЦЕЛЕЙ | 1995 |
|
RU2083996C1 |
| US 4084148 A, 11.04.1978 | |||
| JP 2006234493 A, 07.09.2006. | |||

