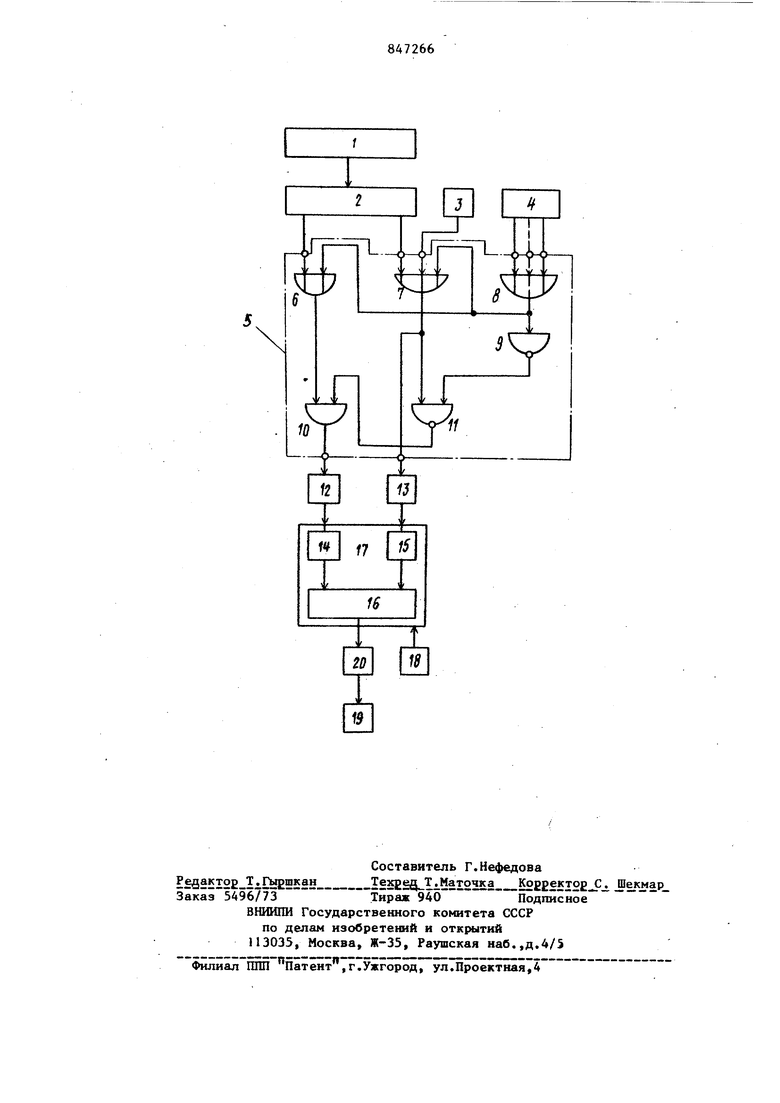
(54) УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ И КОНТРОЛЯ САМОХОДНОЙ УБОРОЧНОЙ МАШИНЫ Изобретение относится к автоматике и может быть использовано при автоматизации различных самоходных убо рочных машин. Известно устройство для автоматического управления и контроля, содер жащее задатчики. датчики, логико-математическое устройство, оперативный блок, исполнительные ме: :анизмыГО Недостатком устройства является сложность и малая надежность. Наиболее близким к предлагаемому по технической сущности является уст ройство, содержащее датчик перегрузки двигателя, датчики отказов рабочи органов, гидронасос с наклонной шайбой, соединенной через рычаг с выходом привода рычага гидронасоса, к первому входу которого подключен орган управле ния, к второму и третьему входам - соответственно выходы первого и второго усилителей, гидромотор, который подключен к выходу гидронасоса, блок определения полезной нагрузки, который соединен со входом блока сравнения с задатчиками Г23. Недостаток данного устройства ограниченность области его применения, из-за отсутствия возможности автоматического управления. Цель изобретения - расширение области применения устройства. Эта цель достигается тем, что в известное устройство для автоматического управления и контроля самоход-ной уборочной машины введем сумматор, элементы НЕ, И, И-НЕ и ИЛИ, первый вход первого элемента ИЛИ, первый и второй входы второго элемента ШШ соединены соответственно с первым и вторым выходами блока сравнения с задатчиками и датчиком перегрузки двигателя, первый и второй входы элемента И соединены соответственно с выходами первого элемента ИЛИ и элемента И-НЕ, а выход - со входом первого усилителя, вход второго усилителя подключен к выходу второго элемента ИЛИ 38 и первому входу элемента И-НЕ, входы сумматора соединены с датчиками отказов рабочих органов, а выход - со вторым входом первого элемента ШШ, с третьим входом второго элемента ИЛИ и через элемент НЕ со вторым входом элемента И-НЕ. На чертеже приведена функциональная схема устройства. Устройство содержит блок I определения полезной нагрузки, блок 2 срав нения с задатчиками, датчик 3 перегрузки двигателя, датчики 4 отказов рабочих органов, логический блок 5, состоящий из первого и второго элементов ИЛИ 6 и 7, сумматора 8, элемента НЕ 9, элемента И 10 и элемента И-НЕ I1, первый и второй усилители 12 и 13, первый и второй электромагниты 14 и 15 и механизм 16 привода, образующие привод рычага гидрЪнасоса 17, орган 18 управления, гидронасос 19 и гидромотор 20. Блок 1 определения.полезной нагрузки состоит из датчика полной нагрузки рабочего органа, датчиков технологического контроля, схемы сложения сигналов с этих датчиков и схемы вычитания их суммы из величины сигнала, пропорционального величине полной нагрузки объекта управления. Привод рычага гидронасоса 17 кинематически соединен с рычагом (не показан) гидронасоса 20 и органом 18 управления. Устройство работает следующим образом. Сигнал, пропорциональный величине полезной нагрузки, поступает на блок 2 сравнения с задатчиками, где проис ходит сравнение сигнала полезной нагрузки с заданш.1ми значениями сигналов предельных нагрузок недогрузки, пе регрузки и формирование управляющих си ,...А„,.,,,« налов, которые поступают на первые вход первого и второго элементов ИЛИ 6 и 7, входящих в состав логического бло ка 5, представляющее собой устройство дискретного типа, предназначенное для автоматического управления дина мическим процессом, и осуществляет переработку входной информации в выходные команды согласно заданному ал-- jj горитму. На второй вход второго элемента ИЛИ 7 поступает сигнал с датчика 3. перегрузки двигателя, а на третий вход с выхода сумматора 8. Когда величина сигнала полезной нагрузки меньше заданного минимального значения нагрузки на первом выходе блока 2 сравнения с задатчиками, появляется сигнал логической 1, который через первый элемент ИЛИ 6 проходит на вход элемента И 10, на втором входе которого присутствует сигнал разрешения, так как втсутствуют сигналы перегрузки и отказов рабочих органов машины (не показаны). Сигнал с выхода элемента И IО через первый усилитель 12 канала недогрузки включает первьй электромагнит 14 привода рычага гидронасоса 17. С помощью механизма 16 привода обеспечивается равномерное перемещение рычага гидронасоса 20 и синхронное изменение величины нагрузки рабочих органов и увеличение скорости машины. Когда полезная нагрузка рабочих органов превышает заданное значение его максимальной нагрузки или когда перегружен двигатель машины (не показан) , сигнал логической 1 с выхода второго элемента ИЛИ 7 через второй уси/штель 13 вхлючает второго элемента магнит 15 привода рычага гидронасоса 17 канала перегрузки, который работает аналогично каналу недогрузки с разницей, что скорость машины уменьшается. При сложных условиях работы машины, например при движении на подъем и малой урожайности убираемой культуры, возможно одновременное присутствие сигнала недогрузки рабочих органов и перегрузки двигателя машины. В этом случае сигнал логической 1 с выхода второго элемента ИЛИ 7 и сигнал логической 1 с выхода элемента НЕ 9 обеспечивают формирование сигнала запрета (логический 0) на выходе элемента И-НЕ И, который запрещает работу канала недогрузки (формируется логический О на выходе элемента И 10), обеспечивая приоритет сигнала перегрузки, при этом машина уменьшает скорость. При отказе любого рабочего органа на выходе сумматора 8 появляется лоit III которая через первый гическая I элемент ИЛИ 6, элемент И Ю, первый усилитель 12 включает первый электромагнит 14 канала недогрузки и одновременно через второй элемент ИЛИ 7, второй усилитель 13 включает второй электромагнит 15 канала перегрузки. Механизм 16 привода, под воздействие электромагнитов 14 и 15, возвращает рычаг гидронасоса 20 в нейтральное положение и обеспечивает экстренное торможение. С помощью органа упр ления 18 че рез тяги (не показаны), соединенные с рычагом гидронасоаа 20, осуществля ется ручное управление .и пи тание логического блока отключается. Использование изобретения, за сче применения в нем привода рычага гидронасоса и выполнения логического блока, позволяет осуществлять ручное и автоматическое управление, т.е. расширяет область применения. Формула изобретения Устройство для автоматического управления и контроля самоходной убо рочной машины, содержащее датчик перегрузки двигателя, датчики отказов рабочих органов, гидронасос с накло ной шайбой, соединенной через рычаг с выходом привода рычага гидронасоса к Первому входу которого подключен орган управления, к второму и третье му входам - соо ветственно выходы первого и второго усилителей гидромотор, который подключен к выходу гц ронасоса, блок определения полезной нагрузки, который соединен со входом блока сравнения с задатчиками, о т личаюцееся тем, что, с целью расширения области применения устройства, оно содержит сутатор, элементы И, НВ, И-НЕ и ИШ, першлй вход первого элв( мента ИЛИ, первый и второй входы вто рого элемента ИЛИ соединены соотвег ственно с первым и вторым выходами блока сравнения с задатчиками и датчиком перегрузки двигателя, перШ|1й и второй входы элемента И соединены соответственно с выходами первого элемента ИЛИ и элемента И-НЕ, а выход - сд входом первого усилителя, вход второго усилителя подключен к выходу второго элeмeнta ИЛИ и первому входу элемента И-НЕ, входы сумма тора соединены с датчиками откаэов рабочих органов, а выход - со вторьо входом первого элемента ИЛИ, с третьим входом второго элемента ИЛИ и через элемент НЕ со вторым входом элемента И-НЕ. Источники информации, принятые во внимание при экспертизе 1.Лоскутов В.И. Управляющие математические машины. М., Маши{А стро« кие, 1967, с.40, рис.10. 2.Авторское свидетельство СССР 221409, кл. А 01 О 41/02, 03.05.66i
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического контроля и управления самоходной уборочной машиной | 1977 |
|
SU701569A1 |
| Устройство автоматического управления выемочной машиной | 1980 |
|
SU877000A1 |
| Устройство для контроля и управления работой корнеплодной уборочной машины | 1977 |
|
SU693406A1 |
| Устройство автоматического управления выемочной машиной | 1977 |
|
SU750065A1 |
| Система автоматического управления режимами работы уборочной машины | 1983 |
|
SU1281197A1 |
| Устройство автоматического управления горной погрузочной машиной с нагребными лапами | 1978 |
|
SU875028A1 |
| Устройство для управления рабочим органом землеройно-транспортной машины | 1980 |
|
SU910958A1 |
| Устройство автоматического управления выемочной машиной | 1982 |
|
SU1078064A1 |
| Способ автоматического управлениягОРНОй МАшиНОй | 1978 |
|
SU810963A1 |
| Устройство для управления загрузкой самоходной уборочной машины | 1987 |
|
SU1628911A1 |