1
Изобретение относится к автоматизации горных машин и может быть использовано для оптимального управления режимом работы погрузочных машин по энергоемкости или производительности погрузки.
Известен способ заш,иты горных машин от динамических перегрузок, в котором сигнал датчика скорости враш,ения приводного двигателя горной машины двукратно дифференцируют и тем самым формируют управление на отключение исполнительного органа 1.
Указанный способ не обеспечивает оптимальное управление режимом работы горной машины, так как не учитываются статические показатели управляемого процесса.
Известен также способ автоматического управления горной машиной 2, основанный на сравнении заданных и текуших значений нагрузки исполнительного органа и скорости подачи и воздействии на регулятор скорости подачи путем определения вида перегрузки по величине скорости подачи и знаку ее отклонения.
Недостатком этого способа является низкая точность и надежность управления режимом работы горной машины, так как не учитывается способность ее к преодолению перегрузок технологического характера.
Целью настояш,его изобретения является повышение точности и надежности управления.
Поставленная цель достигается тем, что дополнительно измеряют скорость враш,ения привода исполнительного органа, по которой также определяют вид перегрузки, прогнозируют во времени по скорости подачи способность машины к преодолению перегрузки и корректируют воздействие на регулятор скорости подачи в соответствии с видом перегрузки последовательно по быстродействию, величине амплитуды и ее знаку, причем коррекцию производят или на уменьшение по апериодическому закону скорости подачи, или на останов ходовой части, или на отход машины.
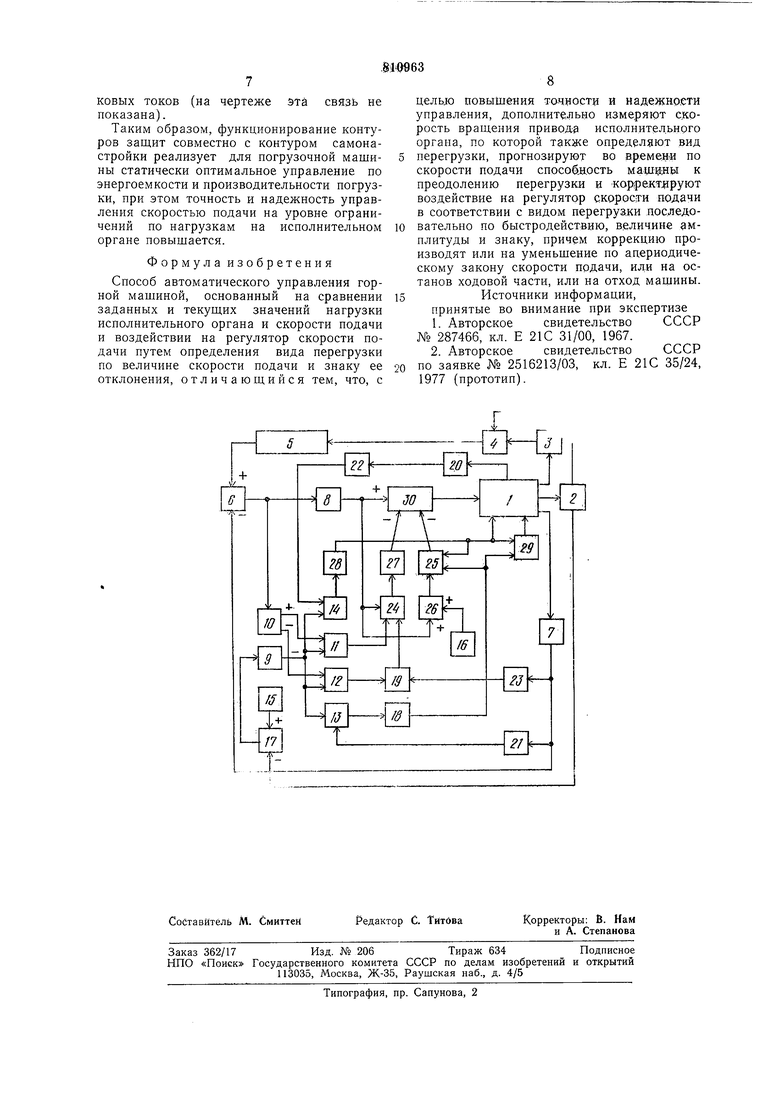
На чертеже приведена блок-схема устройства, реализуюш,его данный способ.
Горная погрузочная машина 1 с регулируемым приводом ходовой части и с элементами отключения приводов ходовой части и исполнительного органа оснаи1,ена датчиком энергоемкости, который включает датчики нагрузки 2, производительности 3 и блок деления 4. Вычислительный блок 5, элемент сравнения 6 по скорости подачи,
датчик скорости подачи 7 и изодромное звено 8 обеспечивают статически оптимальное по величине минимума энергоемкости погрузки управление скоростью подачи. Защиту погрузочной машины 1 от технологических и аварийных перегрузок выполняют логические блоки контроля перегрузки 9 и контроля отклонения по скорости подачи 10, четыре схемы совпадения 11-14, задатчики нагрузки 15 и скорости отвода машины 16, элемент сравнения ио нагрузке 17, элементы задержки 18 и 19, датчик скорости враш,ения привода исполнительного органа 20, нуль-органы 21 и 22, блок вычисления времени задержки 23, ключи 24 и 25, сумматор управления реверсом машины 26, апериодическое звено 27, логический элемент «Память 28, трехуровневая логическая схема 29 с задержкой на отключение и сумматор управляюш,его воздействия 30.
Супдность способа заключается в следуюш,ем.
Величина, пропорциональная энергоемкости погрузки, снимается с выхода блока деления 4 как результат деления мощности на производительность погрузки, фиксируемых соответствующими датчиками 2 и 3. Вычислительный блок 5 по статической экстремальной характеристике энергоемкости погрузки, являющейся функцией скорости подачи, отыскивает ее минимальную величину, которой соответствует оптимальная в этом смысле скорость подачи машины. Задающее оптимальное воздействие с выхода вычислительного блока 5 подается на полол ительный вход элемента сравнения 6, на отрицательный вход которого подается сигнал обратной связи с датчика скорости подачи 7. Отклонение по скорости подачи, снимаемое с выхода элемента сравнения 6, при отсутствии перегрузки на исполнительном органе поступает через изодромное звено 8 и суммирующий вход сумматора управляющего воздействия 30 на регулируемый привод ходовой части погрузочной машины 1. Этот привод отрабатывает оптимальную скорость подачи, соответствующую статически оптимальному режиму погрузки по энергоемкости и производительности.
На оптимальный режим работы погрузочной машины 1 наложены ограничения по недопустимым статическим и динамическим перегрузкам. Так, наличие любого вида нерегрузки по току двигателя исполнительного органа фиксируется в результате сравнения сигналов, снимаемых со второго выхода датчика 2 и выхода задатчика 15 нагрузки, на элементе сравнения 17 логическим блоком 9 контроля перегрузки. При этом на его выходе формируется единичный сигнал, подаваемый на первые входы схем совпадения 11-14. По нарному совпадению единичных сигналов на входах схем
совпадений 11 -14 определяют вид конкретных перегрузок (лпптс лы1(}Г() оргапа погрузочной машины 1, каждая п:; которых требует своей реализации защиты как по быстродействию, так и по характеру движения ходовой части машины.
При отрицательной величине отклонения по скорости подачи, когда работа контура самонастройки направлена на ликвидацию технологической перегрузки, совпадут единичные сигналы на входах второй схем1з совпадения 12, так как на отрицательном выходе логического блока 10 контроля отклонений по скорости подачи выделяется единичный сигнал. Схема совпадения 12 запустит второй элемент задержки 19 и послсдннй начнет отсчет времени задержки на срабатывание защиты. Прогнозирование способности погрузочной машины 1 к преодолению перегрузки в функции скорости подачи осуществляется настройкой второго элемента задержки 19 блоком вычисления времени задержки 23. Указанная настройка моделируется напряжением и вычисляй 6,.
ется по закону Т2 , где 1/ - скорость
V
подачн, а и b - константы.
Кратковременная допустимая технологическая перегрузка, которую исполнительный орган ликвидирует за время, меньшее Т2 за счет уменьшения скорости подачн под действием зправленпя ходовой частью погрузочной машины 1 контуром самонастройки, не приведет к срабатыванию защиты, так как вторая схема совпадения 12 произведет сброс начавшегося запуска второго элемента задержки 19.
Если самоликвидация перегрузки исполнительпым органом за время Т2 не произойдет, что свидетельствует о недопустимом технологическом режиме работы, то включается второй элемент задержки 19, и единичный сигнал с его выхода, подаваемый на второй управляюший вход первого ключа 24, обеспечит замыкание последнего. Первый ключ 24 через свой магистральный вход и апериодическое звено 27 с коэффициентом передачи, равным единице, соединит выход изодромного звена 8 с первым вычитающим входом сумматора управляющего воздействия 30. Погрузочная машина 1 начнет уменьшать скорость подачи по апериодическому закону за счет компенсации на сумматоре управляющего воздействия 30 контура самонастройки управлением с выхода апериодического звена 27. Устранение перегрузки в течение времени, меньшем постоянной времени апериодического звена 27, приведет к отключению защиты, так как не совпадут сигналы на входах второй схемы совпадения 12, и дальнейший режим работы машины будет определяться контуром самонастройки. Пеустранение перегрузки приведет к остановке машины и включению третьей схемы совпадения 13,
так как на второй вход ее будет подан единичный сигнал с выхода нервого нуль-органа 21, срабатываемого при скоростях подачи, близких к нулю и отрицательных. Единичный сигнал с выхода третьей схемы совпадения 13 запустит первый элемент задержки 18. Начнется отсчет постоянной величины времени ть необходимого для проработки исполнительным органом обрушевшегося или скопившегося груза на питателе с остановленной ходовой частью.
Если за время п перегрузка исполнительного органа самоустранится, то третья схема совпадения 13 даст отказ срабатывания защиты и обеспечит сброс запуска первого элемента задержки 18, приведя его в исходное состояние. Если по истечение этого времени перегрузка не самоустранится (ситуация близка к аварийной), то включится первый элемент задержки 18 и своим выходным единичным сигналом включит второй ключ 25 через его первый управляюпдий вход, а также перебросит трехуровневую логическую схему 29 с задержкой на отключение по ее первому входу из состояния отрицательной логической единицы на выходе в положительную, что определит начало отсчета логической схемой 29 выдержки времени тз. В результате включения второго ключа 25 на выходе сумматора управляющего воздействия 30 появится отрицательный сигнал, равный по абсолютной величине выходному сигналу задатчика скорости отвода машины 16, так как управляющее воздействие, снимаемое с выхода изодромного звена 8, проходя через сумматор управления реверсом машины 26 через его первый вход и второй ключ 25, компенсируется на втором вычитающем входе сумматора управляющего воздействия 30. Машина начинает отход из опасной зоны погрузки с постоянной скоростью отвода, поступающему на второй вход сумматора управления реверсом машины 26. Устранение перегрузки в рамках времени тз обеспечит отказ дальнейшей работы защиты, переход, всех логических элементов в первоначальное состояние и нормальную работу контура самонастройки с последующим плавным выбором статического оптимального режима по энергоемкости погрузки. Плавность перехода на оптимальный режим погрузки определяется динамическими параметрами вычислительного блока 5 и изодромного звена 8, согласованным с постоянными времени и коэффициентами передачи погрузочной мащины.
Устранение перегрузки по истечении времени тз приведет к автосбросу выходного сигнала трехуровневой логической схемы 29 в нулевой уровень. Как результат, эта схема отключит приводы машины 1 и переключит устройство на режим ручного управления. Это необходимо для того, чтобы обслул ивающий персонал смог провести
предупредительный осмотр механической части машины и измерить геометрическое расположение ее относительно штабеля. Контур самонастройки режима работы
погрузочной машины 1 на оптимальную величину по энергоемкости допускает, исходя из статической оптимизации, временную динамическую технологическую перегрузку исполнительного органа, приводящую в
своем развитии к аварийной ситуации. Такой режим проявляется, когда существует динамическая перегрузка, а вычислитель ный блок 5 по статической характеристике задает уставку на положительный ЁХОД
элемента сравнения 6 на увеличение сКо-рости подачи машины 1. Так как в этом случае отс тствует тенденция к ликвидации перегрузки контуром самонастройки, и на второй вход первой схемы совпадения
11 подается единичный сигнал с полол ительного выхода логического блока 10 контроля отклонений по скорости подачи, то защита срабатывает мгновенно за счет совпадения сигналов на входах первой
схемы совпадения 11. При этом выходной единичный сигнал первой схемы совпадения 11 подается на первый управляющий вход первого ключа 24, который замыкается. Дальнейшая работа защиты происходит аналогично описанному выше прп замыкании первого ключа 24.
При аварийных перегрузках, наиример,. заклинивании парных лап негабаритным
грузом, приводящих к опрокидыванию привода исполнительного органа, сигнал на выходе датчика скорости вращения 20 привода исполнительного органа достигает величины соответствующей скорости опрокидывания этого привода, что приводит к срабатыванию второго нуль-органа 22. Последний формирует на своем выходе единичный сигнал, подаваемый на второй вход четвертой схемы совпадения 14, которая
своим единичным выходным сигналом включает логический элемент «Память 28. Единичный сигнал на его выходе запоминается и подается на вход элемента отключения привода исполнительного органа погрззочной мащины 1, обеспечивая тем самым снятие напряжения с двигателя исполнительного органа, а также подается на второй управляющий вход второго ключа 25 и второй вход трехуровневой логической
схемы 29 с задержкой на отключение, обеспечивая тем самым отход мащины от щтабеля и ее остановку с переходом на ручное управление. Дальнейщая работа машины после осмотра ее обслуживающим
персоналом и ликвидации причип перегрузки производится в автоматическом режиме,, причем сброс логического элемента «Память 28 производится от кнопки «Пуск контактора двигателя исполнительного органа с соответствующей отстройкой от пусковых токов (на чертеже эта связь не показана).
Таким образом, функционирование контуров защит совместно с контуром самонастройки реализует для погрузочной машины статически оптимальное управление по энергоемкости и производительности погрузки, при этом точность и надежность управлепия скоростью подачи на уровне ограничений по нагрузкам на исполнительном органе повышается.
Формула изобретения
Способ автоматического управления горной машиной, основанный на сравнении заданных и текуш,их значений нагрузки исполнительного органа и скорости подачи и воздействии на регулятор скорости подачи путем определения вида перегрузки по величине скорости подачи и знаку ее отклонения, отличающийся тем, что, с
целью повышения точности и надежности управления, дополнительно измеряк)т скорость вращения привода исполнительного органа, по которой также определяют вид перегрузки, прогнозируют во времени по скорости подачи способдость мащщлы к преодолению перегрузки и кор ректдруют воздействие на регулятор скорости подачи в соответствии с видом перегрузки доследовательно по быстродействию, величине амплитуды и знаку, причем коррекцию производят или на уменьшение по апериодическому закону скорости подачи, или на останов ходовой части, или на отход машины.
Источники информации,
принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 287466, кл. Е 21С 31/00, 1967.
2.Авторское свидетельство СССР по заявке № 2516213/03, кл. Е 21С 35/24,
1977 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство автоматического управления горной погрузочной машиной с нагребными лапами | 1978 |
|
SU875028A1 |
| Способ автоматического управления режимом работы погрузочной машины с барабанно-лопастным исполнительным органом | 1979 |
|
SU866236A1 |
| Устройство сигнализации о режимахРАбОТы гОРНОй пОгРузОчНый МАшиНы | 1979 |
|
SU840350A1 |
| Устройство дискретного управления режимом работы погрузочной машины с нагребными лапами | 1982 |
|
SU1068596A1 |
| Барабанно-лопастная погрузочная машина | 1981 |
|
SU1041705A1 |
| Устройство аврийного отключения при обрыве или стопорении цепи конвейера | 1979 |
|
SU875029A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОЛЕТОМ ВЫСОКОМАНЕВРЕННОГО САМОЛЕТА | 2008 |
|
RU2369524C1 |
| Устройство автоматического управления положением разгрузочного конвейера горной машины | 1980 |
|
SU898059A1 |
| Устройство автоматического управления режимом работы погрузочной машины с нагребными лапами | 1976 |
|
SU654799A1 |
| Цифровая система для программного управления двигателем | 1986 |
|
SU1320793A1 |
