+V
79
оэ го
00
со
. 3
Изобретение относится к сельскому хозяйству, в частности к управлению уборочными машинами, например самоходными кукурузоуборочными и свеклоуборочными комбайнами.
Целью изобретения является оптимизация работы устройства.
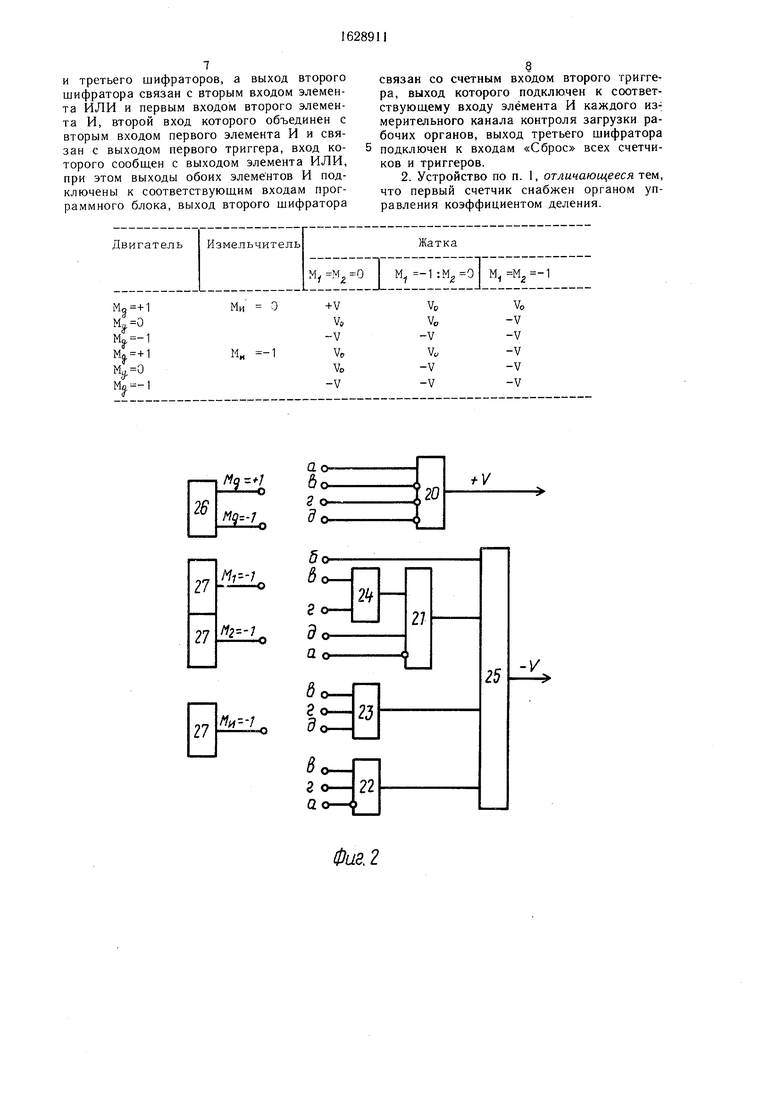
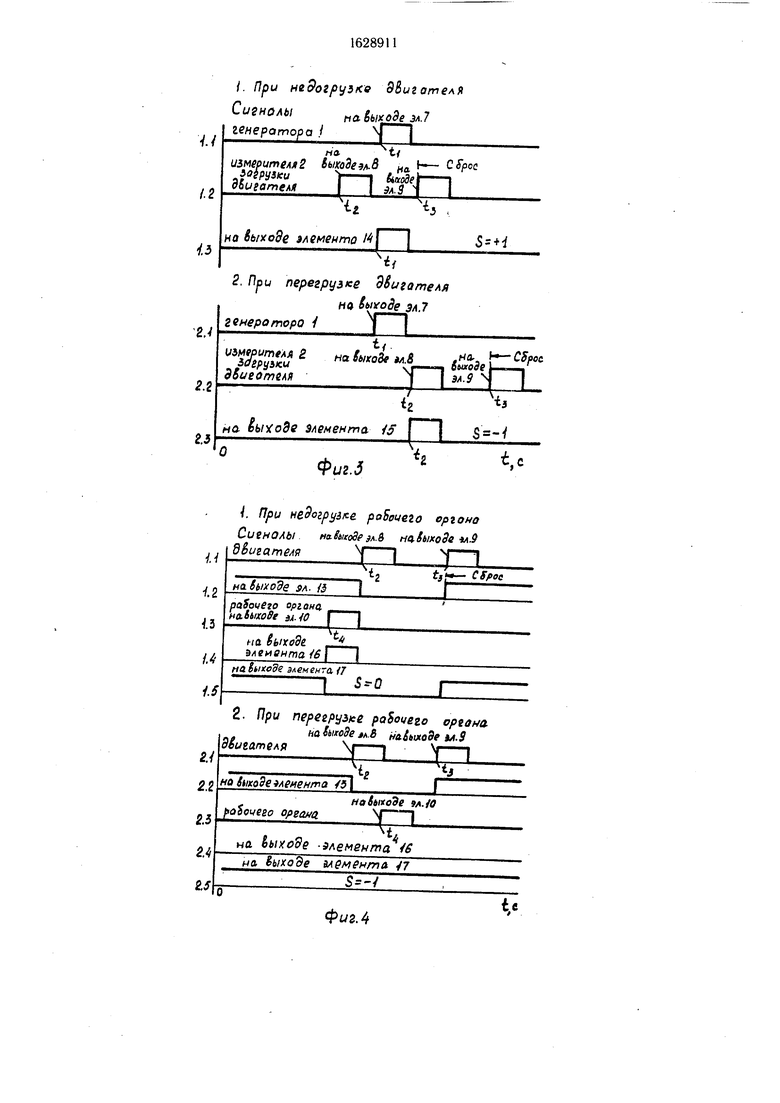
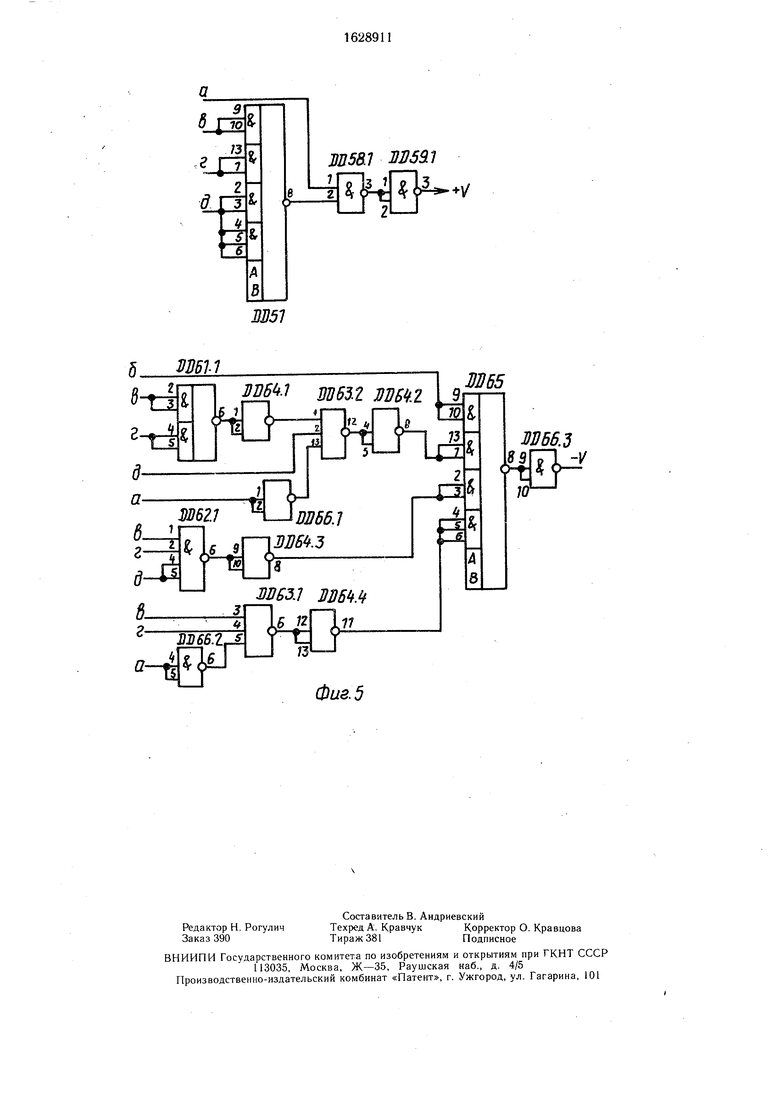
На фиг. 1 изображена функциональная схема автоматического управляющего устройства; на фиг. 2 - принципиальная схема логического программного блока для самоходного кукурузоуборочного комбайна; на фиг. 3 - схема формирования в бортовом процессоре сигналов о загрузке двигателя; на фиг. 4 - то же, сигналов о загрузке рабочих органов; на фиг. 5 - программный блок.
Устройство для управления загрузкой самоходной уборочной машины содержит генератор 1 импульсов, измерительный преобразователь 2 загрузки двигателя, измерительные преобразователи 3 загрузки рабочих органов, число которых равно числу контролируемых рабочих органов, первый двоичный счетчик 4 с органом управления коэффициентом деления, второй двоичный счетчик 5, группу двоичных счетчиков 6 по числу контролируемых рабочих органов, первый 7, второй 8 и третий 9 шифраторы, группу 10 шифраторов по числу контролируемых рабочих органов, элемент ИЛИ 11, первый 12 и второй 13 триггеры, первый 14 и второй 15 элементы И с двумя входами каждый, группы элементов И 16 и триггеров 17 по числу контролируемых рабочих органов, программный блок 18 и исполнительный механизм 19.
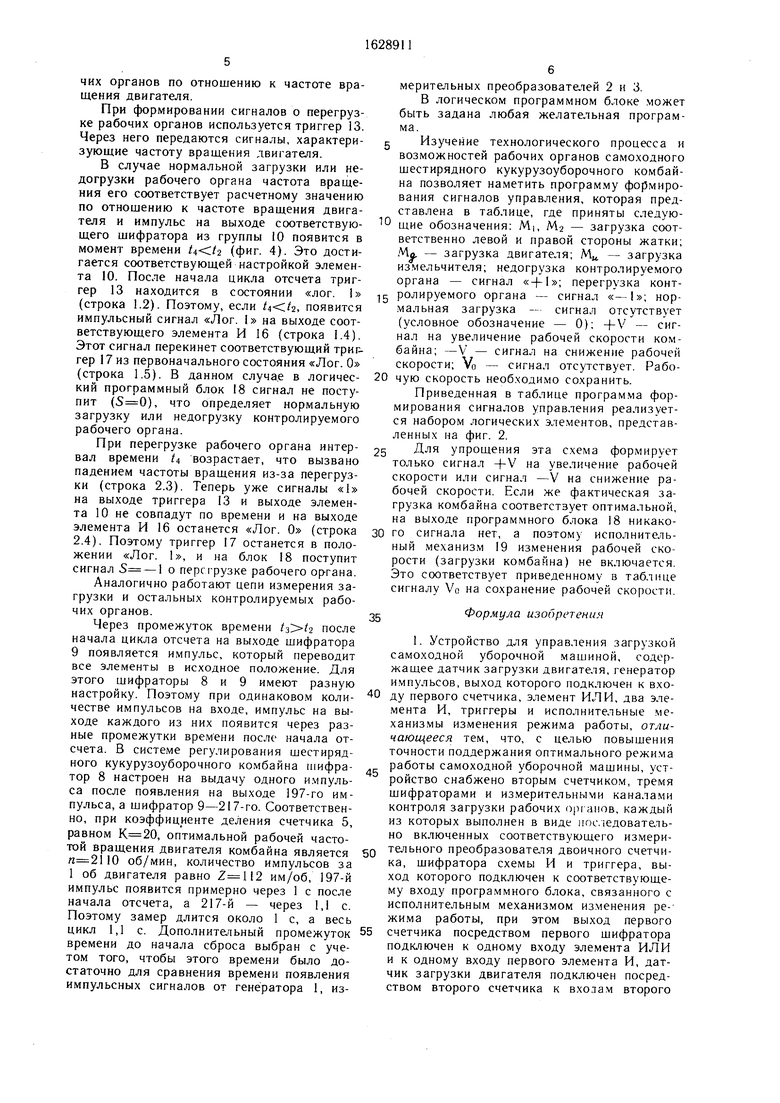
Программный блок 19 состоит из стандартных элементов для выполнения логических операций И, ИЛИ, ЗАПРЕТ и содержи первый логический элемент ЗАПРЕТ 20 с одним управляющим и тремя запрещающими входами, второй 21 и третий 22 элементы ЗАПРЕТ с двумя управляющими и одним запрещающим входом каждый, элемент И 23 с тремя входами, первый 24 и второй 25 элементы ИЛИ. Сигналы на вход бортового процессора подаются от цепи 26 контроля загрузки двигателя и от цепей 27 контроля загрузки рабочих органов, т. е. от жатки, на которую устанавливается два датчика (левая и правая сторона) и измельчитель.
На фиг. 5 введены обозначения DD51, DD65 - К155ЛРЗ; DD61 - К155ЛР1; DD62 - К155ЛА6; DD63 - К155ЛА4; DD58, DD59, DD64, DD66 - К155ЛАЗ.
Устройство работает следующим образом.
При работе комбайна измерительные преобразователи 2 и 3 формируют импульсные сигналы, частота которых зависит от загрузки контролируемых узлов. Частота генератора 1 является эталонной для оценки частоты сигналов измерительного преобразователя 2 загрузки двигателя. После прохождения импульсных сигналов генератора 1 через счетчик 4 и шифратор 7 формируется один короткий импульс. Аналогично на выходе шифраторов 8 и 9 формируются одиночные короткие импульсы. Время появления первого из них после начала цикла используется для оценки загрузки двигателя, второй производит сброс всей системы для нового цикла отсчета.
После прохождения импульсных сигналов генератора 1 через счетчик 4 и шифратор 7 через промежуток времени t после начала цикла отсчета на выходе шифратора 7 формируется один короткий импульс (строчки 1.1 и 2.1). Причем величина t зависит от коэффициента деления счетчика 4. Аналогично через промежутки /г и /3 после на5 чала цикла отсчета формируются импульсы на выходах шифраторов 8 и 9.
Величина 1ч зависит от частоты вращения двигателя, что определяется его загрузкой. При недогрузке двигателя частота вра- п щения двигателя возрастает и /2 уменьшается. Признаком недогрузки является уменьшение 1ч до значения, когда . Первый из поступавших сигналов перебрасывает триггер 12 из положения «Лог. О в положение «Лог. 1. В рассматриваемом
5 случае недогрузка двигателя - это сигнал на выходе шифратора 8. Следующий за ним сигнал от генератора 1 теперь уже может пройти через элемент И 14, так как на второй вход элемента поступает «1 от триггера 12. Поэтому на вход блока 18 по0 ступает сигнал недогрузки двигателя 5 +1. При перегрузке двигателя частота его вращения снизится. Поэтому (строка 2.2). Сигнал от генератора придет раньше. Он перекинет триггер 12 в положение «Лог. 1 и теперь уже сигнал шифратора 8 пройдет
5 через элемент И 15 (строка 2.3). На вход блока 18 поступает сигнал перегрузки двигателя . Таким образом импульс, пришедший, вторым, определяет характер загрузки двигателя и поступает на вход прогQ раммного блока.
При загрузке двигателя в пределах допустимой зоны импульсы от шифраторов 7 и 8 частично или полностью совпадут по времени. На выходах элементов И 14 и 15 сигналы не появятся, так как после
5 элемента ИЛИ 11 они соединяются в один первый сигнал, а второго сигнала в этом цикле замера уже не будет.
Применение в схеме двоичного счетчика 4 с органом управления коэффициента деления позволяет менять настройку
° системы при изменениях технического состояния двигателя комбайна. В процессе эксплуатации необходимость такой перестройки устанавливается с помощью специальных средств.
Для контроля загрузки рабочих органов сравнивается частота вращения контролируемых рабочих органов с частотой вращения двигателя. Признаком перегрузки здесь является снижение частоты вращения рабочих органов по отношению к частоте вращения двигателя.
При формировании сигналов о перегрузке рабочих органов используется триггер 13. Через него передаются сигналы, характеризующие частоту вращения двигателя.
В случае нормальной загрузки или недогрузки рабочего органа частота вращения его соответствует расчетному значению по отношению к частоте вращения двигателя и импульс на выходе соответствующего шифратора из группы 10 появится в момент времени (фиг. 4). Это достигается соответствующей настройкой элемента 10. После начала цикла отсчета триггер 13 находится в состоянии «лог. 1 (строка 1.2). Поэтому, если , появится импульсный сигнал «Лог. 1 на выходе соответствующего элемента И 16 (строка 1.4). Этот сигнал перекинет соответствующий триггер 17 из первоначального состояния «Лог. О (строка 1.5). В данном случа.е в логический программный блок 18 сигнал не поступит (), что определяет нормальную загрузку или недогрузку контролируемого рабочего органа.
При перегрузке рабочего органа интервал времени /4 возрастает, что вызвано падением частоты вращения из-за перегрузки (строка 2.3). Теперь уже сигналы «1 на выходе триггера 13 и выходе элемента 10 не совпадут по времени и на выходе элемента И 16 останется «Лог. О (строка 2.4). Поэтому триггер 17 останется в положении «Лог. 1, и на блок 18 поступит сигнал 5 - 1 о перегрузке рабочего органа.
Аналогично работают цепи измерения загрузки и остальных контролируемых рабочих органов.
Через промежуток времени после начала цикла отсчета на выходе шифратора 9 появляется импульс, который переводит все элементы в исходное положение. Для этого шифраторы 8 и 9 имеют разную настройку. Поэтому при одинаковом количестве импульсов на входе, импульс на выходе каждого из них появится через разные промежутки времени после начала отсчета. В системе регулирования шестиряд- ного кукурузоуборочного комбайна шифратор 8 настроен на выдачу одного импульса после появления на выходе 197-го импульса, а шифратор 9-217-го. Соответственно, при коэффициенте деления счетчика 5, равном , оптимальной рабочей частотой вращения двигателя комбайна является 10 об/мин, количество импульсов за 1 об двигателя равно им/об, 197-й импульс появится примерно через 1 с после начала отсчета, а 217-й - через 1,1 с. Поэтому замер длится около 1 с, а весь цикл 1,1 с. Дополнительный промежуток времени до начала сброса выбран с учетом того, чтобы этого времени было достаточно для сравнения времени появления импульсных сигналов от генератора 1, измерительных преобразователей 2 и 3.
В логическом программном блоке может быть задана любая желательная программа.
с Изучение технологического процесса и возможностей рабочих органов самоходного шестирядного кукурузоуборочного комбайна позволяет наметить программу формирования сигналов управления, которая представлена в таблице, где приняты следую0 щие обозначения: MI, M - загрузка соответственно левой и правой стороны жатки; Мл. - загрузка двигателя; Ми - загрузка измельчителя; недогрузка контролируемого органа - сигнал перегрузка конт5 ролируемого органа - сигнал нормальная загрузка - сигнал отсутствует (условное обозначение - 0); -J-V - сигнал на увеличение рабочей скорости комбайна; -V - сигнал на снижение рабочей скорости; Vo - сигнал отсутствует. Рабо0 чую скорость необходимо сохранить.
Приведенная в таблице программа формирования сигналов управления реализуется набором логических элементов, представленных на фиг. 2.
5 Для упрощения эта схема формирует только сигнал -f-V на увеличение рабочей скорости или сигнал -V на снижение рабочей скорости. Если же фактическая загрузка комбайна соответствует оптимальной, на выходе программного блока 18 никако0 го сигнала нет, а поэтому исполнительный механизм 19 изменения рабочей скорости (загрузки комбайна) не включается. Это соответствует приведенному в таблице сигналу Vo на сохранение рабочей скорости.
35
Формула изобретения
1. Устройство для управления загрузкой самоходной уборочной машиной, содержащее датчик загрузки двигателя, генератор импульсов, выход которого подключен к вхо0 ду первого счетчика, элемент ИЛИ, два элемента И, триггеры и исполнительные механизмы изменения режима работы, отличающееся тем, что, с целью повышения точности поддержания оптимального режима работы самоходной уборочной машины, устройство снабжено вторым счетчиком, тремя шифраторами и измерительными каналами контроля загрузки рабочих органов, каждый из которых выполнен в виде последовательно включенных соответствующего измериQ тельного преобразователя двоичного счетчика, шифратора схемы И и триггера, выход которого подключен к соответствующему входу программного блока, связанного с исполнительным механизмом изменения ре-жима работы, при этом выход первого
5 счетчика посредством первого шифратора подключен к одному входу элемента ИЛИ и к одному входу первого элемента И, датчик загрузки двигателя подключен посредством второго счетчика к входам второго
и третьего шифраторов, а выход второго шифратора связан с вторым входом элемента ИЛИ и первым входом второго элемента И, второй вход которого объединен с вторым входом первого элемента И и связан с выходом первого триггера, вход которого сообщен с выходом элемента ИЛИ, при этом выходы обоих элементов И подключены к соответствующим входам программного блока, выход второго шифратора
8
связан со счетным входом второго триггера, выход которого подключен к соответствующему входу элемента И каждого измерительного канала контроля загрузки рабочих органов, выход третьего шифратора подключен к входам «Сброс всех счетчиков и триггеров.
2. Устройство по п. 1, отличающееся тем, что первый счетчик снабжен органом управления коэффициентом деления.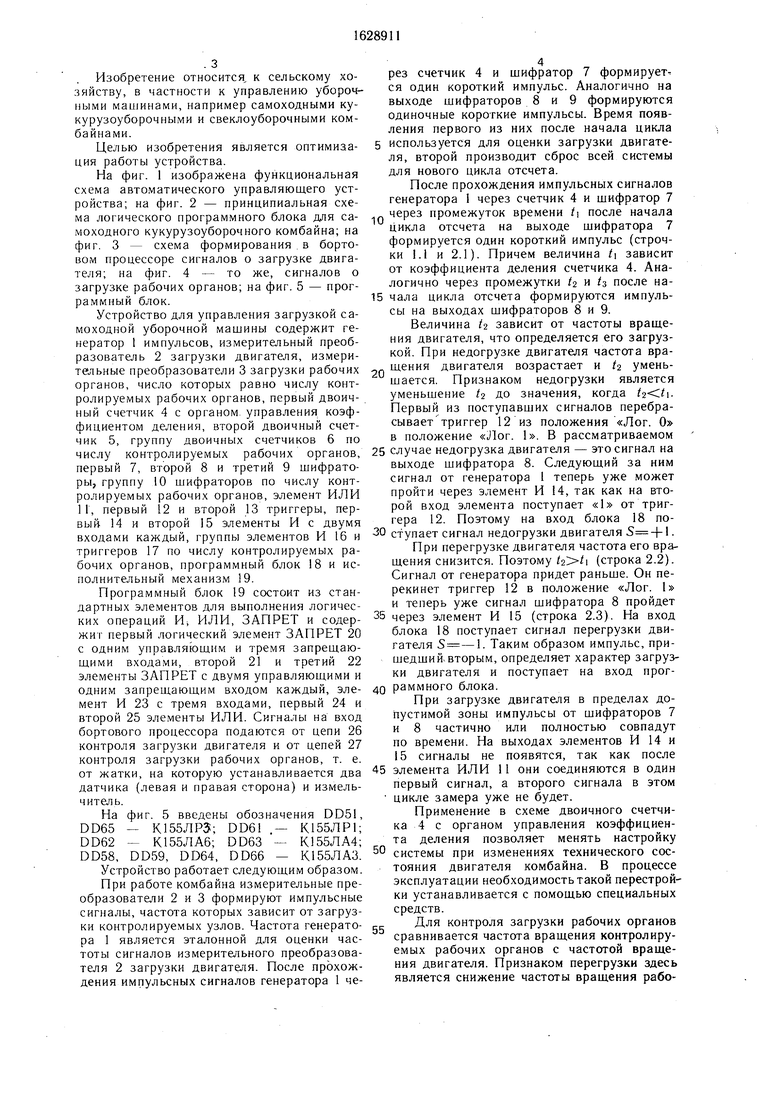
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического управления загрузкой самоходной уборочной машины | 1989 |
|
SU1743450A1 |
| Автоматическое самонастраивающееся устройство для поддержания оптимальной нагрузки картофелеуборочного комбайна | 1977 |
|
SU919626A1 |
| Устройство для автоматического контроля и управления самоходной уборочной машиной | 1977 |
|
SU701569A1 |
| Сигнализатор загрузки двигателя | 1987 |
|
SU1495650A1 |
| Автоматическое устройство для поддержания оптимальной нагрузки самоходной комбинированной сельскохозяйственной машины | 1978 |
|
SU858640A1 |
| Система автоматического управления режимами работы уборочной машины | 1983 |
|
SU1281197A1 |
| СИГНАЛИЗАТОР ЗАГРУЗКИ ДВИГАТЕЛЯ | 1992 |
|
RU2027979C1 |
| Устройство контроля режима работы зерноуборочного комбайна | 1982 |
|
SU1135450A1 |
| Устройство для автоматического контроля и управления загрузкой корнеклубнеуборочной машины | 1981 |
|
SU986330A1 |
| Устройство для автоматического регулирования загрузки самоходной уборочной машины | 1985 |
|
SU1412638A1 |
Изобретение относится к сельскому хозяйству, в частности управлению уборочными машинами, например самоходными кукурузоуборочными и свеклоуборочными комбайнами. Цель изобретения - оптимизация работы устройства. Устройство содержит генератор 1 импульсов, измерительный преобразователь 2 загрузки двигателя, измерительные преобразователи 3 загрузки рабочих органов, двоичные счетчики 4 и 5, группу двоичных счетчиков 6, шифраторы 7, 8, 9, группу шифраторов 10, триггеры 12, 13, первый и второй элементы И 14 и 15, группы элементов И 16 и триггеров 17, программный блок 18, исполнительный механизм 19. При работе комбайна измерительные преобразователи 2 и 3 формируют импульсные сигналы, частота которых зависит от загрузки контролируемых узлов. Для контроля загрузки рабочих органов сравнивается частота вращения контролируемых рабочих органов с частотой вращения двигателя. Признаком перегрузки является снижение частоты вращения рабочих органов по отношению к частоте вращения двигателя. 1 з.п. ф-лы. 5 ил. (С СО
27
Мг-1
§о 6
27
Н2--1
Ии-1
6,
г д
нл
го-422
Фиг. 2
27
25
/. При не9огру5 9 З&иготелЯ
Сигналы „аёыходезл.7 генератора I |
наН/
измерителя2 быкодеэл-В На Ь- Сброс
зоёрузки)1
Вбиеателя I эл.З 1 I
ЧЈЧ3
но выходе злементо /4 Ss + l
i
, При недогруз е. роБоиего органа Сигналы na.fi/to8f л.д нлХыхоЗе ы.9 , д&иеателяУ 1 N
i2 13
М if
Фиг. 4
miL
ЯЩМ Ш5.2 ЯШ.2 hm
№iSr
I jl-J j .з
3D63.1 ЯЯБщ
o
Фиг. 5
| Устройство автоматического регулирования загрузки зерноуборочного комбайна | 1982 |
|
SU1066489A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
