(54) УСТРОЙСТВО ДЛЯ РАЗБОРА СТОПЫ ЛИСТОВОГО
МАТЕРИАЛА
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневматический самонаклад | 1987 |
|
SU1497056A1 |
| Устройство для подъема стапельного стола самонаклада | 1986 |
|
SU1400994A1 |
| СПОСОБ ЗАХВАТА И ОТДЕЛЕНИЯ ВЕРХНЕГО ЛИСТА В СТОПЕ И ЕГО ДАЛЬНЕЙШЕГО ПЕРЕМЕЩЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2140387C1 |
| Устройство для отделения от стопы и подачи листов | 1980 |
|
SU1022922A1 |
| Способ поштучной подачи гибкого листового материала | 1987 |
|
SU1497057A1 |
| Устройство для разбора стопы листового материала | 1983 |
|
SU1154190A1 |
| Устройство для замены стапеля самонаклада листовой печатной машины | 1989 |
|
SU1680610A1 |
| Приемное устройство для листовой печатной машины | 1987 |
|
SU1442491A2 |
| Устройство для загрузки стапельного стола листообразными светочувствительными пленками | 1972 |
|
SU445609A1 |
| ПРИЕМНО-ВЫВОДНОЕ УСТРОЙСТВО ДЛЯ ПЕЧАТНЫХ МАШИН | 1973 |
|
SU368160A1 |
Изобретение относится к упаковке ПРО.ЦУКТОВ и предназначено для исполь зования в пакетоделательных машинах для подачи стопы листового материала к механизмам их захвата и полистного отделения от стопы. Известно устройство для подачи листов из стопы с сохранением ее постоянной высоты, состошцее из стола с прикрепленными к нему роликами, направляющих роликов, двигателя, редуктора, барабана для канатов и канатов присоединенных к столу и барабану, а также из чувствительных элементов управления включением и выключением двигателя, приводящего к подъему и останову стола со стопой. В устройстве после загрузки кассеты листами производится включение дви гателя, приводящего к вращению бараба на, наматыванию канатов, поднимающих стол с листами по мере их отбора fl. Недостатком устройства является периодическое его выключение, т.е. не возможность обеспечения непрерывной работы. Известно также устройство для подъ ема стапеля листов в Сс1монакладе листообрабатывающей машины, состоящее из -кривошипно-шатунного механизма, храпового механизма, червячной пере дачи, датчика управления подъемом стола, приводов рабочего и ускоренного подъема стола и привода подъема на стержнях остаточного стапеля листов, что позволяет обеспечить непрерывность работы машины. Стол и набор стержней получают движение от своих приводов через цепные передачи. на цепях которых они подвешены C2j. Недостатком устройства явлйется значительная его сложность: наличие большого количества приводных эле-,ментов, поддон для остаточного стапеля выполнен в виде отдельных стержней, управление и обслуживание устройства более трудоемкое и др. Известно также устройство, предназначенное для подъема штабеля листов в самонакладах для печатных машин, содержащее механизм полистного перемещения стапельного стола, моторный механизм ускоренного перемещения стапельного стола, механизм отделения верхнего листа от стопы, датчик контроля верхнего уровня разбираемой стопы, связанный с приводом механизма полистного перемещения стапельного стола, механизм поддерживания стапельного, стола с остатком разираемой стопы при ее пополнении, етыре цепных передачи, несупие захваы подъема стапельного стола, и доолнительный привод для синхронизироанного подъема противоположных стоон стапельного стола.
При полистном перемещении стапелього стола в работе участвует датчик онтроля верхнего уровня разбираемой топы. При этом подъем стапельного стола осуществляется захватами цепных передач, получающих движение от храпового и червячного механизмов. При ускоренном подъеме .стапельного стола в работе участвует моторный механизм. При этом движение стапельному столу сообщается захватами тех же цепных передач, теперь получающих движение от дригателя через червячную передачу.
Непрерывность работы устройства обеспечивается специальными захватными звездочками, несущими стапельный стол с остаточной стопой и включающий своими контактами двигатель моторного механизма, во время начала ее подъ-ема. При этом положение очередных зубьев захватных звездочек, имеющих почти равномерную скорость вращения, соответствует вполне определенному положению стапельного стола с вновь набранной стопой листов 3 .
Недостатком, устройства является повышенная его сложность, трудность {а может и невозможность) синхронизации поворота зубьев захватных звездочек с подъемом стапельного стола с вновь набранной стопой, так как последний может занимать произвольные положения по высоте по отношению к зубьям указанных звездочек,в зависимости от высоты вновь набранной стопы, чем затрудняется возможность, непрерывной работы.
Цель изобретения - упрощение конструкции устройства с обеспечением . непрерывности процесса подачи листов и повышением его надежности.
Указанная цель достигается тем, что механизм перемещения стапельного стола имеет платформу под стапельный стол, две винтовые пары, винты которых кинематически связаны с общим приводом машины, а гайки укреплены на платформе и связаны одна с другой посредством цепной передачи, и смонтированные на платформе электродвигатель и червячную передачу, червяк которой соединен с валом электродвигателя, а .червячное колесо - с одной из гаек, а механизм поддерживания стацельного стола включает два Зс1мка, каждый из которых состоит из корпуса с радигшьным пазом, охватывающего соответствующий винт, смонтированного на корпусе посредством подпружиненных яальцев захвата и полугайки, установ..ленной в радиальном пазу корпуса и (кинематически связанной с захватом.
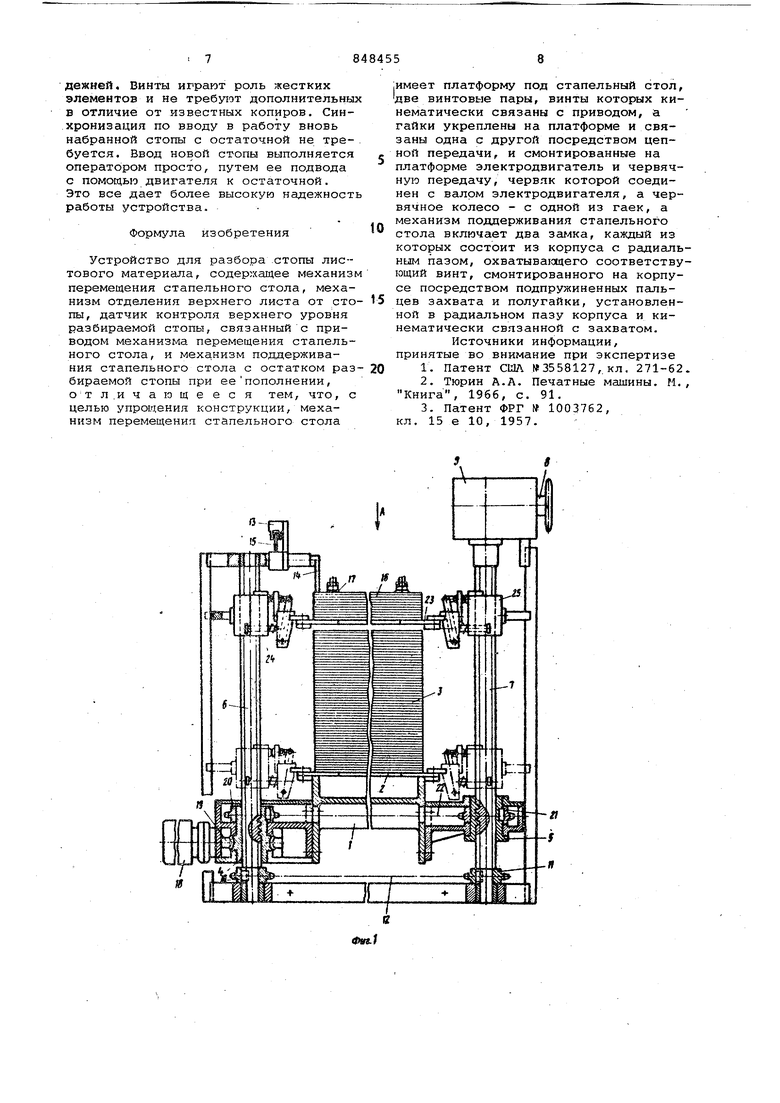
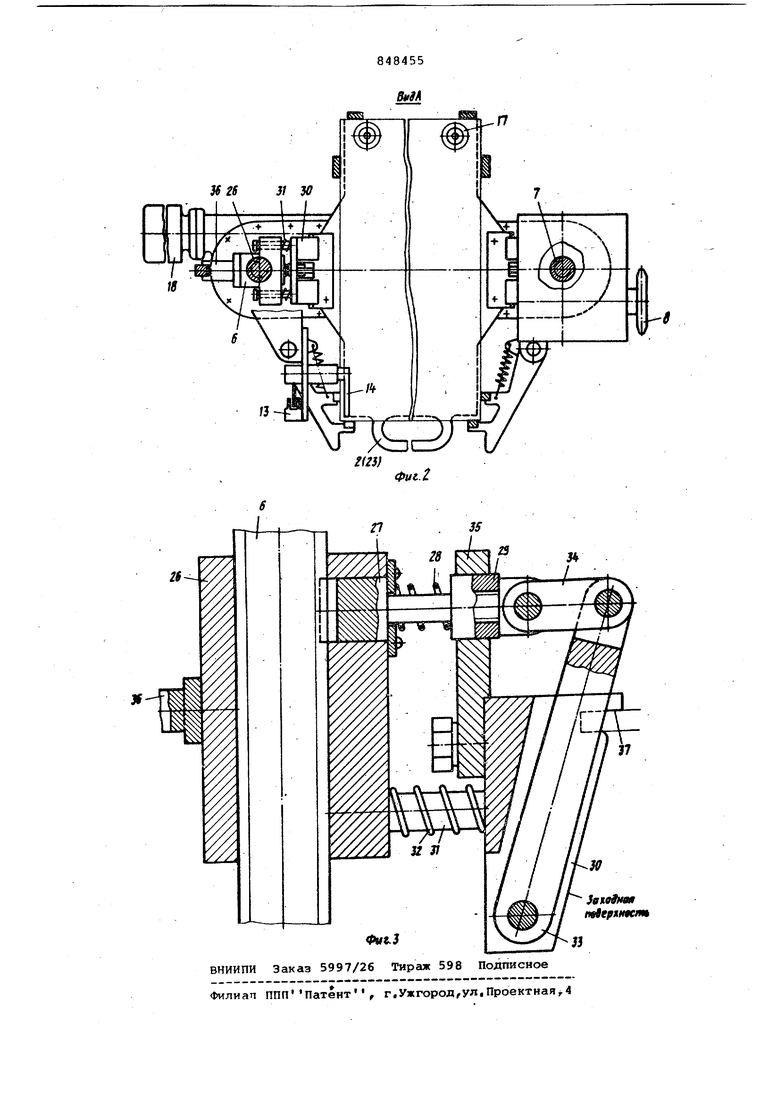
На фиг. 1 изображено устройство после загрузки стапельного стола листами, общий вид; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - замок, разрез Платформа 1 со стапельным столом 2 несущим основную стопу 3 с помощью гаек 4 и 5, удерживается на винтах б и 7. Платформа 1 получает движение от.механизма перемещения стапельного стола при полистном разборе листов, получающего привод от кинематики машины через звездочку 8, и от механизма ускоренного перемещения стапельного стола при его загрузке листами. Механизм полистного перемещения стапельного стола включает звездочку 8, червячный редуктор 9 с электромагнитной муфтой (не показана), винты 6 и 7, гайки 4 И:5, звездочки 10 и 11 и цепь 12. Работой электромагнитной муфты (а следовательно, вводом в работу редуктора 9) управляет датчик контроля верхнего уровня разбираемой стопы, содержавши чувствительное устройство 13, рычаг 14 и щуп 15. Нижний конец 14 находится в постоянном соприкосновении с верхним листом остаточной стопы 16, которая в связи с отбором листов присосами 1 меняет свой уровень. При этом чувствительное устройство вырабатывает управляю1-дий сигнал.
Механизм ускоренного перемещения стапельного стола включает двигатель 18, червяк 19, гайку 4 (она же - червячное колесо), звездочки 20 и 21 и цепь 22.
Пеханизм поддержания стапельного стола 23 с остатком разбираемой cfoпы 16, содержащий замки 24 и 25, позволяет производить загрузку стапельного стола 2 листами 3. Каждый из з.амков состоит (фиг. 3) из корпуса 26, охватывающего винт 6 или 7 и имеющего радиёшьный паз, пблугайки 27 с возможностью перемещения в пазу корпуса 26, пружины 28, удерживающей полугайку 27 в выведенном из резьбы винта 6 положении, ползуна 29, соединенного с полугайкой 27, захваТа 30, смонтированного подвижно на корпсе 26 посредством пальцев 31, пружин 32, стремящихся удерживать захват 30 в отведенном (относительно корпуса 26) положении, замкового рычага 33, шарнирно связывающего захват 30 с полугайкой 27 через серьгу.34, кронштейна 35, являющегося второй опорой для полугайки 27 с полэуном 29, и фиксирующей вилки 36, удерживакядей замки 6 и 7 от проворота. Захват 30 имеет паз 37, предназначенный для ввода и удержания одной из сторон стапельного стола 2 или 23. При отсутствии одной из сторон стапельного стола 2 (или 23) в пазу 37 замковый рычаг 33 перекрывает паз, а полугайJKa 27 выведена из винта 6. Устройство работает следующим образом. Присоси 17 при каждом своем ходе захватывают верхний лист с остаточно стопы 16 и подают в машину для дальнейшей обработки. В процессе отбора листов остаточная стопа 16 поднимает ся стапельным столом 23. Синхронно подъему стапельного стола 23 происхо дит подъем платформы 1, несущей стапельный стол 2. Подъем стапельного стола 23 осуществляется замками 24 и 25, а платформы 1 - гайками 4 и 5. Движение их подъема сообщается винта ми 6 и 7, получа 01т1ими вращение от ки нематики машины- через звездочку 8 и червячный редуктор 9. За положением уровня остаточной стопы.16, связанно го с подъемом стопы зинтами 6 и 7 и отбором листов присосами 17, следит датчик контроля уровня с помощью, рычага 14, нижний конец которого находится в постоянном соприкосновении с верхним листом остаточной стопы 16 При подъеме остаточной стопы 16 до определенного положения чувствительное устройство 13 выдает сигнал н-а отключение электромагнитной глуфты червячного редуктора 9. Винты 6 и .7 останавливаются. Подъем остаточной стопы 16 (а также стапельных столов 23 и 2) прекращается. Присосы 17 про должают отбор листов с остаточной ст пы 16. Уровень ее понижается. Рычаг 14 при этом поворачивается так, что щуп 15 приводит к выдаче чувствитель ным устройством 13 сигнала на включе ние электромагнитной муфты червячног редуктора 9. Винты 6 и 7 снова начи.нают вращаться и производить подъем стапельных столов 23 и 2. Таким обра зом, выполняя включение и выключение электромагнитной муфты, винты 6 и 7 осуществляют подъем листов к присоса 17, обеспечивая нормальную работу ма шины. В момент принятия (оператором) ре шения о выполнении загрузки стапельного стола 2 новой партией листов платформа 1 находится у стапельного стола 23 и в соприкосновении с ним, а стапельный стол 2 снят с устройства. Приступив к загрузке, оператор включает двигатель 18, который через червяк 19 передает вращение на гайку 4 (червячное колесо) и от нее через звездочку 20, цепь 22 и звез|цочку 21 на гайку 5, осуществляя опускание платформы 1 в удобное для {загрузки положение. Поместив на платформу 1 стапельны стол 2, производится его загрузка ли тами.- Платформа 1 опускается до тех. пор, пока на стапельном столе не помещается максимально возможное колит честно листов. Закончив загрузку .ста пельного стола 2 листами, происходит подъем набранной стопы 3. При этом двигатель 18 сообщает гайкам 4 и 5 противоположное вращение. Стапельный стол 2 поднимается до соприкосновения стопы 3 с нижней поверхностью стапельного стола 23. Стапельный стол 23 выводится из устройства. Замки 24 и 25 освобождаются от замыкания и по винтам 6 и 7 опускаются к стапельному столу 2, а, о.статок стопи 16 падает на основную стопу 3. При своем опускании из замков налетает на соответствующую сторону стапельного стола 2.Двигаясь по инерции вниз, захват 30 замка скользит своей заходной поверхностью по торцу стапельного стола2, перемеЕ аясь к своему корпусу 26 на пальцах 31, сжкмая пружины 32. Когда захват 30 заплечиком паза 37 упирается в поверхность стапельного стола 2, опускание замка 24 прекращается. На всем пути скольжения захвата 30 по торцу стапельного стола 2 замковый рычаг 33 ijs касается последнего, а полугайка 27 не заходит в резьбовую поверхность винта 6 (или 7), удерживаемая пру киной 28. Освободившись от действия стапельного стола 2, пружины 32 начинают надвигать захват 30 пазом 37, на стапельный стол 2, охватывая его по толщине. Одновременно с захватом 30 перемещается и замковый рычаг 33. Встретив торец стапельного стола 2, замковый рычаг 33 поворачивается вокруг ни;:шей оси, стремясь завести полугайку 27 в резьбовую нарезку виктн 6 (или 7). В момент несовпадения рэзьб винта 6 (или 7) и полугайки 27 перемещение захвата 30 и поворот замкового рычага 33 приостановится. Как только такое совпадение рез.ьб наступает за счет вращения винта 6 (или 7), полугайка 27 входит в нарезку винта б (или 7). Этим процесс-захвата стапельного стола 2 замками 24 и 25 заканчивается. Значительно большую часть времени подъем стопы 3 осуществляется плат-. формой 1, поэтому замки 24 и 25 разгружаются, хотя и находятся в положв нии замкнутой винтовой пары. Только после опускания платформы 1 замки 24 и 25 нагружаются остаточной стопой 16. После загрузки стапельного стола 2 листами с образованием новой стопы 3 последняя подводится к йтапельному столу 23, который оператором выводится из замков 24 и 25. Освободившись от стапельного стола 23, замковый рычаг 33 под действием пружины 28 поворачивается, выводя из резьбовой нарезки винта 6 (или 7) полугайку 27, что позволяет замкам 24 и 25 опуститься к стапельному столу 2 для его захвата. Предлагаемое устройство име1ет боее простое принципиальное и контруктивное решение, уменьшается коичество приводных элементов и больая часть из них решена проще и надежней. Винты играют роль жестких элементов и не требуют дополнительны в отличие от известных копиров. Синхронизация по вводу в работу вновь набранной стопы с остаточной не требуется. Ввод новой стопы выполняется оператором просто, путем ее подвода с помощью двигателя к остаточной. Это все дает более высокую надежност работы устройства. Формула изобретения Устройство для разбора стопы листового материала, содержащее механиз перемещения стапельного стола, меха низм отделения верхнего листа от ст пы, датчик контроля верхнего уровня разбираемой стопы, связанный с приводом механизма перемещения стапель ного стола, и механизм поддерживания стапельного стола с остатком ра бираемой стопы при еепополнении, отл.ичающе ее я тем, что, целью упрощения конструкции, механизм перемещения стапельного стола имеет платформу под стапельный стол, две винтовые пары, винты которых кинематически связаны с приводом, а гайки укреплены на платформе и связаны одна с другой посредством цепной передачи, и смонтированные на платформе электродвигатель и червячную передачу, червяк которой соединен с валом электродвигателя, а червячное колесо - с одной из гаек, а механизм поддерживания стапельного стола включает два , каждый из которых состоит из корпуса с радиальным пазом, охватывающего соответствующий винт, смонтированного на корпусе посредством подпружиненных пальцев захвата и полугайки, установленной в радиальном пазу корпуса и кинематически связанной с захватом. Источники информации, принятые во внимание при экспертизе 1.Патент США №3558127,. кл, 271-62. 2.Тюрин А.Л. Печатные машины. М., Книга, 1966, с. 91. 3.Патент ФРГ 1003762, кл. 15 е 10, 1957.
