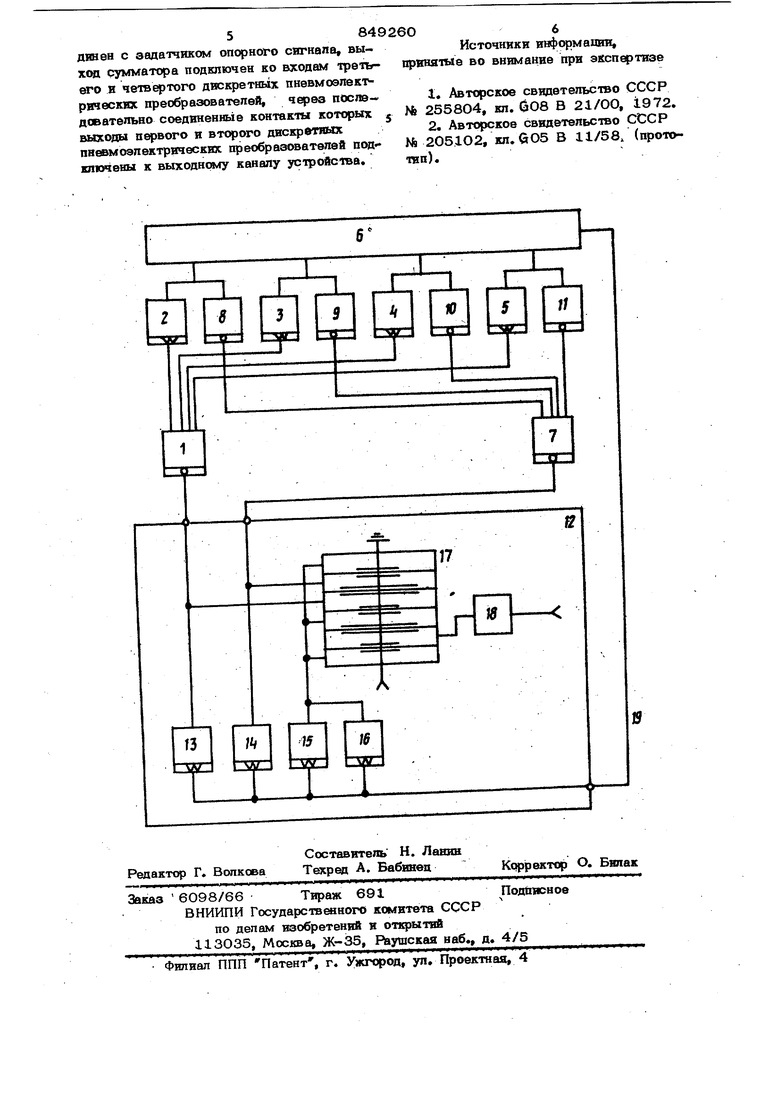
изобретение относится к эпектропнев магическим устройствам управп ения технопогяческими обьектамн. Известны устройства управления, заши 1Ы и сигнализации о нарушении хода технологического процесса, содержащие пинии связи и индикаторы по числу, блокк1ру««(ых параметров, скемы задержки и логические блоки l J. Наиболее близким по технической сушности к предлагаемому является устройство , содержащее основные датчики-сигнализаторы, выходы которых соедвн нены с гифроаналоговым преобразователем и блок управления, подключенный своим входом к выходу ццфроаналог(жого преобразователя t2J. Однако известные устройства не поа воляют выявлять ложные срабатывания датчиксю-сигнализатооов. Цель изобретения - повышение надежности устройства управления технологическим объектом. Поставленная цель достигается тем, что известное устройство управления технологическим объектом, содержащее основные датчики-сигнализаторы, выходы которых соединены с первым ци})р« аналогстым преобразователем, и блок управления, снабжено дополнительными датчиками-сигнализаторами, включенными попарно с датчиками-сигнализаторами, и вторым Ц11|)роаналоговым феобразователем, соединенным с выхо дами дополнительных датчиков-сигнализаторов, а блсж управления содержит сумматор, задатчик опорного сигнала и четътре дискретных пнввмоэлектрических преоб раз жателя с заданными уровнями сраба тывания , причем выходы обоих Ш роаналоговых преобразсюатепей соединены соот ветственно со входами первого и второго дискретных пневмоэлектрических преобр зователей и с плюсовым и минусовым входами сумматора, второй плюсовой вход которого соединен с датчиком опорного сигнала, выход сумматора подкл1очен ко входам третьето и четвертого дискретных пневмоэпектрических преобр зоватепей, через поспедс ательно соеднненные контакты которых выходы первого и второго дискретных пневмоэпектовческвх преобразователей подключены к выходному каналу устройства. На чертеже представлена схема предлагаемого устройства. Устройство содержит первый щфроаналоговый преобразователь (ЦАП) 1, подкл ченный своими выходами, к входам основных датчиксю-сигнализаторов 2,3,4 и 5, в свою своими, входами подключенных к технологическому объекту 6, и второй дЕфроаналрговый преобразователь 7, подключенный своими входами к выходам дополнительных датчиков- х;игнализа торов 8, 9, 10 и 11, подключенных сво ими входами к технологическому объек ту 6 попарно с оснсюными датчиками-сиг нализаторами соответственно 2,3,4 и 5. Блок . 12 упроаления содержит дискрет ные пнюмоэлектричвскиг преобразсюатели 13,14 , 15 и 16, сумматор 17, за.датчик 18 опорнсяго сигнала. Задатчик 18 соединен с плюсовым входом сумматора 17.Выходной канал 19 соединен с объектом 6 . Выходы основных дополнительных датчике могут быть как электрическими; так и пневматическими. На чертеже представлен вариант выполнения устройства, включающего оснсжные датчики 2,3,4 и 5 с электрическими выходами и допопнительшде датчики 8, 9,1О и 11 с пн Матическими выходами. ПАП I и 7 формщ}уют сигнал Pgjj по следующему алгоритму P«,,.-Po-2 P, BbtX о 1 - начальное значение выходного сигнала ЦАП,К - ЧИСЛО датчиков, подключенных к входам каждого ЦАП; ЛР - класс точности ЦАП . Таким образом, по величине выходног сигнала ПАП можно определить какие датчики срабатывают. Каждый яз ЦАП выполнен с устройствами регистрации выходного сигнала (не показан). По записи устанавливают время подачи сигнала и сочетание срабо тавших датчике. Пнзвмоэлектрические преобразователи 13 и 14 имек уставки, равные по вели чине одинаксжые по знаку, а уставки преобраэователей 15 и 16 8 04соответственно равны ( РН - дР ) И (Р ц +Л Р ), где Р - давление опорного сигнала задатчика 18 . Выходы преобразователей 13 и 14, выполненных с нормально разомкнуть1ми контактам соединены через нормальнозамкнутые -контакты преобраз(жателей 15 и 16 с выходным каналом 19 . Устройство работает следующим обрсьзом. При исправной работе каждого из 11АП, а также датчиков, подключенных . к их входам, величины выходных аналогсюых сигнал(ж обоих ЦАП равны, и установленный с помощью задатчика 18, на выходе сум- : Ч матора сигнал рн с величиной как правило, равной 0,6 кгс/см , остается посTOHHHbtM даже тогда, датчики сбрасываются в любых сочетаниях. Отклонение какого-либо параметра (или нескольких параметре) вызовет срабатывание преобраз(ателей 13 и 14, вь1ходные сигналы которых поступают по каналу 19 на управление объектом 6 . Если в какой-либо паре датчиксв срабатывает только один, выходные сигналы ЦАП 1 и 7 будут разными, поэтому один яз преобразшателей 15 или 16 сработает и выходные сигналы от преобразователей 13 и 14 прохбдят к объекту. При этом будет сформирован соответствующий сигнал. Формула изобретения Устройство управления технологическим объекттм, содержащее основные датчикисигнализаторы, выходы которых соединены с первым цхфроаналогсжым преобразователем, и блок управления, о т л и ч а ющ ei е с я т&л, что, с целью повышения надежности работы, устройство снабжено дополнительными датчиками-сигнен лизаторами, включенными попарно с основными датчиками-сигнализаторами, и шфроаналоговым преобразсвателем, соединенным с выходами дополнительных датчиков-сигнализаторов, а блок управления содержит сумматор, задатчик опорного стенала и четыре дискретных пн моэлактрических преобразователя с заданны-i ми уровнями срабатъюания, ( выходы обоих ш роаналогсюых преобразователей соединены соответственно со входами первого и второго дискретных пне&мозлектрическик преобразователей и с плюсовым и минусовым входами сумматора, второй птпоссшой вход которого соедявен с задатчиком опорного сигнал в, выход сумматора подключен ко входам третьего и четвертого дискретных пневмоэпектрвческих преобразователей, через последовательно соединенные контакт которых выходы первого и второго дискретных пн моэлектрнческюе прео6разовате1лей подключены к выходнсяиу каналу ycipoflciBa.
Источники информации, принятые во внимание при экспертизе
t. Авторское свидетельство СССР № 255804, кл. 008 В 21/00, 1972.
2, Авторское свидетельство СССР NI 2051О2, кл. GO5 В 11/58/(прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Пневматическое управляющее устройство для регулирования температуры и уровня куба ректификационной колонны | 1978 |
|
SU752243A1 |
| Пневматический двухпозиционный регулятор с настраиваемой зоной нечувствительности | 1989 |
|
SU1755256A1 |
| Регулятор с размытой логикой | 1988 |
|
SU1587466A1 |
| Система управления процессом каталитической сополимеризации | 1979 |
|
SU868704A1 |
| Электропривод | 1985 |
|
SU1396232A1 |
| Устройство для управления процессом каталитического алкилирования | 1979 |
|
SU905799A1 |
| Пневматический регулятор | 1978 |
|
SU752229A1 |
| Пневматический адаптивный регулятор с переменной структурой | 1983 |
|
SU1285429A1 |
| Пневматический финитный регулятор | 1988 |
|
SU1522151A1 |
| Устройство управления режимом тепловлажностной обработки бетонных и железобетонных изделий | 1986 |
|
SU1404359A1 |
