Изобретение относится к адаптивным системам с переменной структурой и может быть применено в локальных системах автоматического управления нестационарными технологическими процессами в нефтехимической, нефтеперерабатывающей, металлургических и других отраслях промьппленности.
Цель изобретения - расширение области применения и повышение качества регулирования.
На чертеже показана схема регулятора.
Регулятор содержит пропорциональное звено 1, состоящее из сумматора 2, пневмореле 3 с переменными дросселями 4 и 5, элемента 6 умножения на постоянный коэффициент, формирователь 7 функции переключения, состоящий из блока вычисления модуля ошибки, включающего сумматоры 2 и 8 и элемент ИЛИ 9, и дифференциатора, включающего переменный дроссель 10, емкость 11, элемент 12 сравнения. В регулятор входят также переменный дроссель 13, элемент 14 масштабирования, выполненный на пятимембранном элементе, интегральное звено 15, включающее сумматор 16,емкость 17.В обратнуюсвязь сумматора 16 включен дистанционно управляемый дроссель 18, через который выход сумматора 16 соединен с одним из входов, подключенных к задат- чику 19, выходного сумматора 20, подключенного через усилитель 21 к выходному каналу Р.
вЬ1Х
Входные каналы
параметров Р и задания Р подключены к пропорциональному и интегральному звеньям и формирователю функции переключения, выход элемента сравнения дифференциатора связан с одним из входов (с камерой управления реле 3) пропорционального звена 1. Задатчик 19 соединен с входами пропорционального звена,(сумматора 2, элемента 6 умножения),, формирователя функции переключения (сумматорами 2 и 8), с другим входом сумматора 20 и с плюсовой камерой пятимембранного сумматора элемента 14 масштабирования. Выход элемента ИЛИ 9 блока вычисления модуля соединен через переменный дроссель 13 с минусовой камерой пятимембранного сумматора элемента 14 масштабирования.
Регулятор работает следующим образом.
На входы регулятора подаются сигналы, пропорциональные заданному Р,
и текущему Р значениям регулируемой величины, и опорное давление с задат- чика 19.
Регулятор отрабатывает следующий алгоритм управления:
Peb,..,X.,-bJ-JP,-dt5
,; т,э -у1Рх1 .
к. при ,
Т Т„ +Т
W
к
К при
5
0
5
0
5
0
5
0
5
Р 0.3
у т S сигнал рассогласования, Р
Р.-РЗ;
нелинейный коэффициент усиления регулятора. К,, адаптированное время интегрирования регулятора; коэффициент усиления, который выбирается в зависимости от инерционности объекта управления;
время интегрирования, соответствующее Р 0, устанавливается при помощи Р ; функция переключения,
dt
Указанный алгоритм реализуется следующим образом.
Выходной сигнал элемента сумматора 2 РЬЫХ 5 РО . проходя через проточные камеры реле 3 (в зависимое- ти от значения S), переменные дроссели 4 и 5, поступает в минусовую камеру элемента 6, на выходе которого отрабатывается регулирующее воздействие вида 1 д,уб( Д получает одно из двух значений К- и К в зависимости от значения S, которое -формируется при помощи блока 7 формирования функции переключения S
Р .12 dt
При этом с помощью/сумматоров 2 и 8 и элемента ИЛИ 9 вычисляется модуль
ошибки Рвь„.з 1Рц-Р +РО Рвых.д и Р„ подаются соответственно в минусовую и плюсовую камеры элемента 14, на выходе которого отрабатывается сигнал в камеры элемента 14, на выходе которого отрабатьшаетс1н сигнал в виде Pgbix о Коэффициент усиления 2 выбирается в зависимости от инерци - онности объекта управления..
Этот сигнал с выхода элемента 14 поступает в управлякнцую камеру управляемого дросселя 18. В это время
3
Р,, управляет проводимостью управляемого дросселя 18, тем самым изменяет постоянную времени Т интегралного звена.
Интегральное звено 15 реализует воздействие
Р р 1/т Гр Ht
i 1 i I / 1 1. у U U j
T..Pxl , Р„ и выход пропорционального звена 1
SblX-IS
-ц аа
„ и выход пропорционального звена (P..,.v ) суммируясь на выходном сумвЬ1х е
маторе Р.
„ Kp -f-4p, dt.
вых 10 X т х По мере увеличения ошибки рассогласования Р
вык-м
пропорционально увеличивается время интегрирования, начиная от его значения Т , соответствующего номинальному режиму нестационарного объекта. При больших рассогласованиях стремится к бесконечности, следовательно, -- становится
малой величиной, т.е. интегральная часть регулятора отключается, тем самым уменьшается время регулирования и снимается излишняя колебательность, предотвращаются потери устойчивости переходных процессов. При движении системы регулирования к состоянию рав- йовесия достигается инте нсивное 5гмень шение времени интегрирования интегрального звена до номинального значения.
Такое выполнение адаптивного регулятора с переменной структурой расши- ряет область применения, а также по- вьш1ает качество регулирование неста- цио нарных процессов.
Редактор А.Козориз
Заказ 7642/49Тираж 862 Подписное
ВНИИПИ Государственнрго комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная,
ь1285429
Формула
изобретения
5
0
5
0
5
Пневматический адаптивный регулятор с переменной структурой, содержа- .щий подключенные к входным каналам параметра и задания пропорциональное и интегральное звенья, последнее из которых выполнено на сумматоре, и формирователь функции переключения, состоящий из последовательно соединенных блоков вычисления модуля ошибки и дифференциатора, связанного с одним из входов пропорционального звена, причем выход пропорционального звена-, соединен с одним из входов выходного сумматора, другой вход которого, входы пропорционального звена и один из входов формирователя функции переключения соединены с выходом задатчика, отличающийся тем, что, с целью расширения области применения и повышения качества регулирования, в нем установлены дистанционно управляемый дроссель, переменный дроссель и элемент масштабирования, выполненный на пятимембранном элементе, минусовая камера которого через переменный дроссель соединена с выходом формирователя функции переключения, плюсовая камера - с выходом задатчика, а выход - с управляющим входом дистанционно управляемого дросселя, включенного в канал положительный обратной связи сумматора интегрального звена, выход которого через дистанционно управляемый дроссель сообщен с третьим входом выходного сумматора.
Составитель О.Гудкова
Техред Л.Сердюкова Корректор М.Максимишинец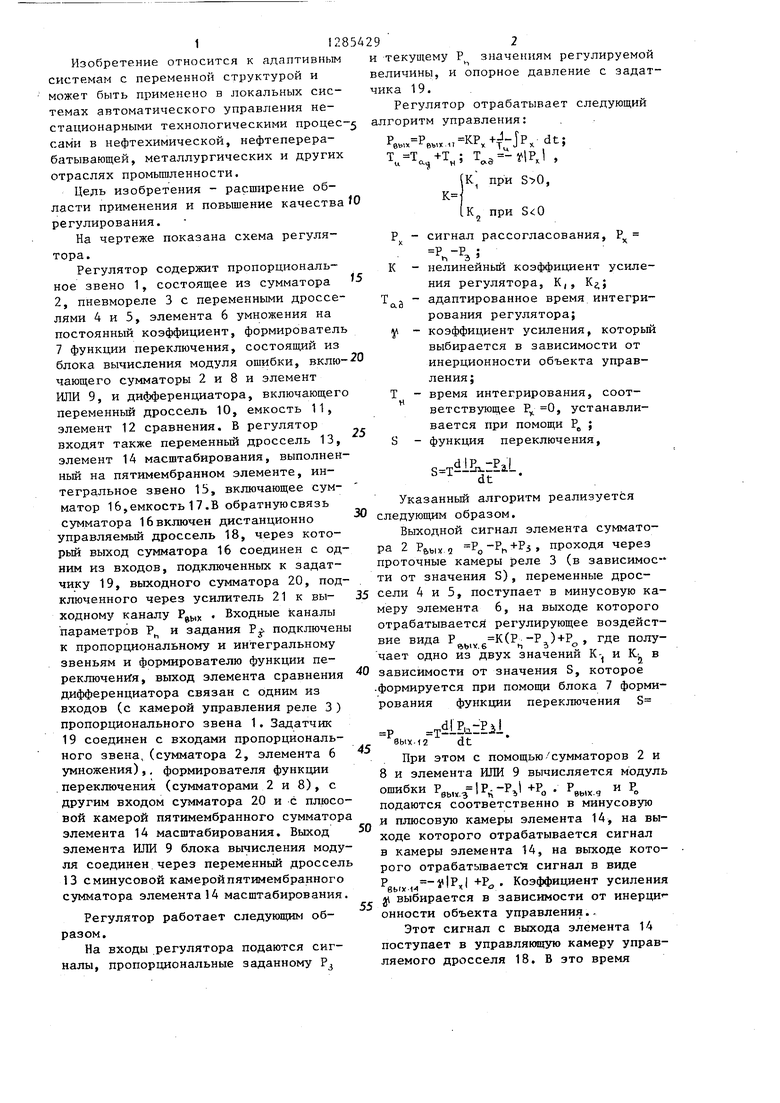
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневматический регулятор | 1978 |
|
SU752229A1 |
| Пневматический регулятор | 1987 |
|
SU1474589A1 |
| Пневматический адаптивный регулятор с переменной структурой | 1977 |
|
SU742872A1 |
| Устройство для управления процессом каталитического алкилирования | 1979 |
|
SU905799A1 |
| Пневматическое управляющее устройство для регулирования температуры и уровня куба ректификационной колонны | 1978 |
|
SU752243A1 |
| Пневматический регулятор с переменной структурой | 1975 |
|
SU542171A1 |
| Пневматический регулятор с переменной структурой | 1974 |
|
SU540256A1 |
| Пневматический регулятор переменной структуры | 1975 |
|
SU566238A1 |
| Система управления процессом каталитической сополимеризации | 1979 |
|
SU868704A1 |
| Пневматический регулятор | 1982 |
|
SU1040466A1 |
Изобретение относится к системам автоматического управления. Цель - )асширение области применения и повышение качества регулирования. Это достигается за счет включения в цепь положительной обратной связи сумматора 16 интегрального звена дистанционно управляемого дросселя 18, который по сигналу от элемента 14 масштабирования (по мере увеличения ошибки рассогласования) пропорционально увеличивает время интегрирования, что при больших рассогласованиях позволяет отключить интегральное звено, снимая излишнюю колебательность и уменьшая время регулирования. 1 ил. (Л
| Берендс Т.К | |||
| и др | |||
| Элементы и схемы пневмоавтоматики | |||
| М.: Машиностроение, 1976, с.110 | |||
| Шигин К.Е | |||
| и др | |||
| Пневматический пропорционально-интегральный регулятор с переменной структурой | |||
| Пневмоавтоматика | |||
| М.: Наука, 1972, рис.2, с.122. |
