(54) УСТРОЙСТВО ДЛЯ УЛЬТРАЗВУКОВОЙ ХИРУРГИИ
| название | год | авторы | номер документа |
|---|---|---|---|
| УЛЬТРАЗВУКОВОЕ УСТРОЙСТВО | 1992 |
|
RU2045239C1 |
| Устройство для ультразвуковой хирургии | 1988 |
|
SU1595489A1 |
| УСТРОЙСТВО И СПОСОБ УПРАВЛЕНИЯ САМОЧУВСТВИТЕЛЬНЫМ УЛЬТРАЗВУКОВЫМ ПЬЕЗОЭЛЕКТРИЧЕСКИМ ДВИГАТЕЛЕМ | 2015 |
|
RU2631332C2 |
| УСТРОЙСТВО ДЛЯ ВОЗБУЖДЕНИЯ И АВТОМАТИЧЕСКОЙ СТАБИЛИЗАЦИИ РЕЗОНАНСНЫХ КОЛЕБАНИЙ УЛЬТРАЗВУКОВЫХ СИСТЕМ | 2007 |
|
RU2350405C2 |
| Способ определения сопротивления излучения пьезокерамического преобразователя и устройство для его осуществления | 1989 |
|
SU1755170A1 |
| Ультразвуковой генератор | 1983 |
|
SU1094705A1 |
| Устройство для ультразвуковой хирургии | 1982 |
|
SU1115741A1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОЦЕССОМ УЛЬТРАЗВУКОВОЙ ЛИПОСАКЦИИ | 2003 |
|
RU2240073C1 |
| Устройство для контроля качества изделий | 1988 |
|
SU1606925A1 |
| Ультразвуковое излучающее устройство | 1981 |
|
SU1000118A1 |
1
Изобретение относится к медицинской texraiке, а именно к ультразвуковым хирургическим устройствам.
Известно устройство для ультразвуковой хирургии, содержащее последовательно соединенные генератор ультразвуковой частоты с преобразователем электрических колебаний в механические, рабочий инструмент с датчиком коле&иий инструмента, схему обратной связи и схему стабилизации амплитуды инструмента {.
Однако применение известного устройства из-за поперечных вибраций рабочего инструмента, возникаюишх из-за отсутствия средств, обеспечивающих работу устройства только на рабочей частоте его, снижает надежность в процессе длительных операций.
Цель изобретения - уменьшение травматичности.
Указанная цель достигается тем, что в устройстве для ультразвуковой хирургии, содержащем последовательно соединенные генератор ультразвуковой частоты с преобразователем электрических колебаний в механические, рабочий инструмент с датчиком колебаний инструмента, схему обратной связи и схему стабилизации амплитуды инструмента, схема обратной связи и схема стабилизавдш амплитуды инструмента выполнены в виде последовательно соединенных схем выделения напряжения обрапюй связи трансформатора, фазовращателя, полосового усилителя, регулируемого ограничителя и усилителя напряжения, причем вход схемы выделения напряжения обратной связи соединен с выходом датчика колебаний инструмента, а выход усилителя напряжения соеданен со входом генератора ультразвуксжой частоты.
При зтом преобразователь злект{жческ11х . колебаний в механические и датчик колебаний инструмента, выполнены в виде единого пьезопреобразователя.
При этом в него введен индикатор резонанса, вьшолиенный в виДе светодиода, соеданенного с датчиком колебаний инструмента.
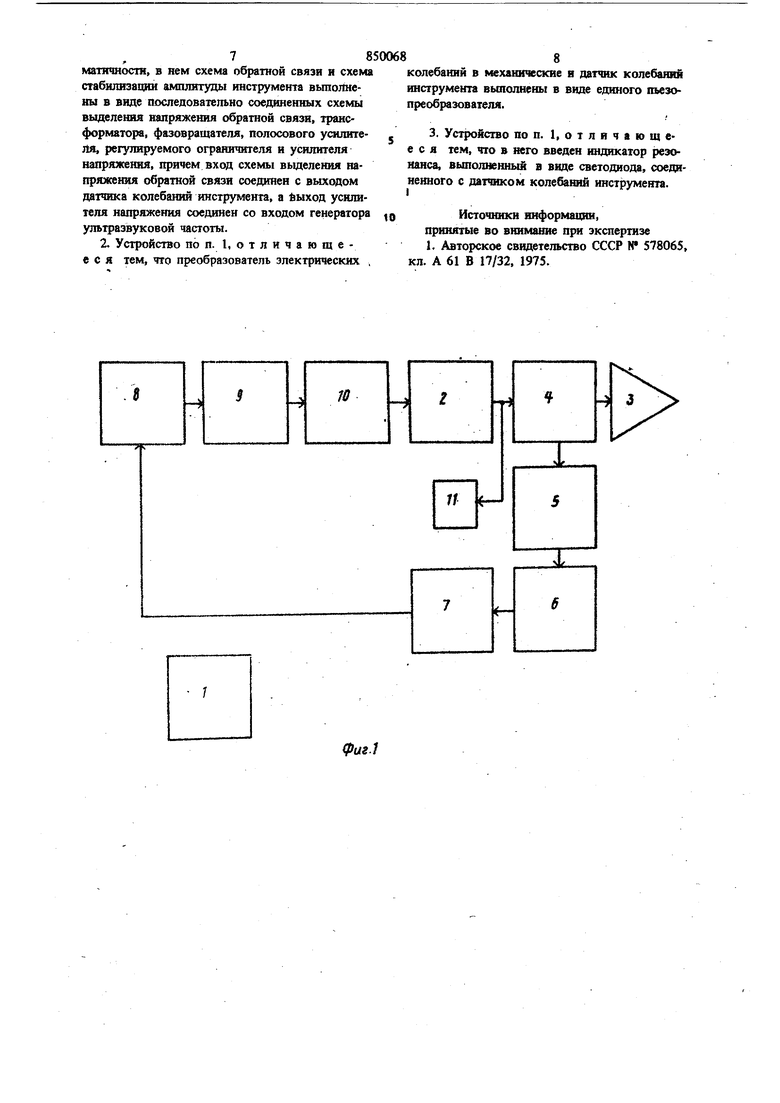
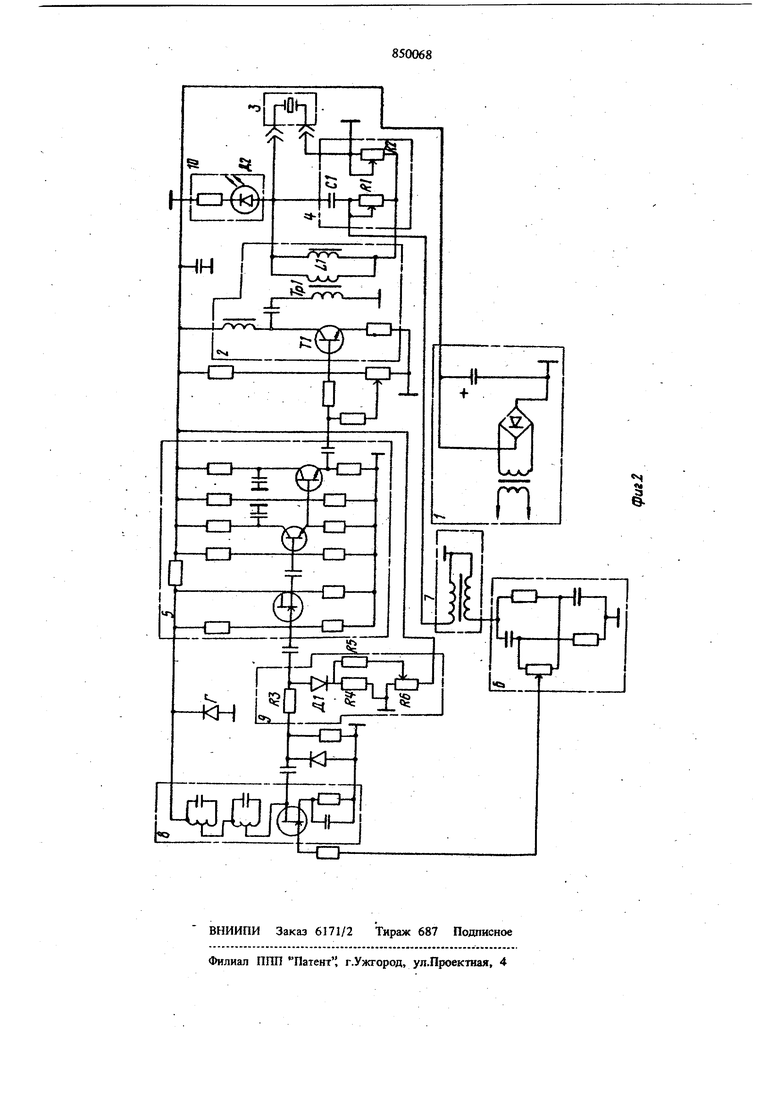
На фиг. 1 изображена структурная схема устройства для ультразвуковой хирурпш; на фиг. 2 - электрическая принципиальная схема устройства для ультразвуковой хирургии.
38
Устройство содержит источник 1 питания, последовательно соединенные генератор 2 ультразвуковой частоты с преобразователем электрических колебаний в механические, рабочий инг струмент 3 с датчиком 4 колебаний инструмента, причем преобразователь электрических колебаний в механические и датчик 4 колебаний инструмента выполнены в виде единого пьезопреобразователя, схему обратной связи и схему стабилизации амплитуды инструмента, выполненные в виде последовательно соединенных схем 5 вьщеления напряжения обратной связи трансформатора 6, фазовращателя 7, полосового усилителя 8, регулируемого ограничителя 9, усилителя 10 напряжения и индикатор И резонанса, выполненный в виде светодиода, соединенного с датчиком 4 колебаний инструмента. При этом вход схемы 5 выделения напряжения обратной связи соединен с выходом датчика 4 колебаний инструмента, а выход усилителя 10 напряжения соединен со входом генератора 2 ультразвуковой частоты. При этом источник 1 питания представляет собой выпрямитель со стабилизатором выпрямленного напряжения и соединен с генератором 2, полосовым усилителем 8, ограничителем 9 и усилителем 10. Генератор 2 состоит из тран:истора ТТ и соединен через выходной согласующий трансформатор Тр-1 со схемой 5 выделения напряжения обратной связи и датчиком 4 колебаний инструмента, выполненным в виде пьезопреобразователя. Рабочий инструмент 3 представляет собой механический резонатор, выполненный в виде концентратора ультразвуковых колебаний с режущи устройством на его конце, причем концентратор жестко соединен с датшком 4 колебаний, который в то же время является возбудителем механических колебаний. Схема 5 выделения напряжения обратной связи содержит KOimeHсатор и два переменных резистора R и R которые вместе со статической емкостью Cj
пьезопреобразователя образуют мост. Если выpf ... Яг
полнено условие .- -, то напряжение обратной связи, возникающее между концами резисторов и R, зависит только от динамического сопротивления пьезопреобразователя.
Усилитель 10, включенный в цепь обратной связи, обеспечивает режим самовозбуждения генератора 2.
Трансформатора 6, первичная обмотка которого соединена с выходом схемы 5 выделения напряжения обратной связи, выполняет функции согласования, вторичная обмотка его соединена со входом фазовращателя 7, который состоит из двух конденсаторов, двух резисторо -и потенциометра. Подбором значений емкостей конденсаторов и сопротивлений резисторов i обеспечивают в узком диапазоне рабочих частот на выходе фазовращателя сдвиг фаз около
{± ) С помощью потетдаометра осуществляется плавная регулировка фазы от ( ) до
/ TS
. Регулировка фазы позволяет обеспечить работу инструмента 3 с пьезопреобразователем точно на его резонансной частоте.
Полосовой усилитель 8 состоит из транзистора, работающего в режиме усиления с одним или несколькими настроенными контурами в выходной цепи. Контура настроены со сдвигом по резонансной частоте таким образом, что необходимое для самовозбуждения генератора 2 усиление получают только в рабочей полосе частот. Регулируемый ограничитель 9 напряжения обратной связи содержит диод D1, три резистора RJ, R4, R5 и потенциометр R6, обеспечивающий постоянство напряжения обратной связи, подводимого к транзистору ТТ генератора 2, что, в свою очередь, стабилизируют переменную составляющую тока транзистора TI и, следовательно, амплитуду механических колебаний инструмента 3. Для зтого необходимо, чтобы напряжение обратной связи с вьгхода полосового усилителя 8 было всегда больше напряжения на входе усилителя 10, необходимого для получе- ния заданной величины переменной составляющей выходного тока транзистора Т1.Это условие обеспочивают соответствующим выбором коэффициента усиления полосового усилителя 8.С помощью потенциометра R 6,создающего запирающее напряжение в цепи диода D 1, регулир)тот величину ограниченного напряжения обратной связи, а,следовательно, и амплитуду колебаний инструмента 3,которая пропорциональна перемешюй составляющей выходного тока транзистора Т1. Индикатор 11 резонанса выполнен в виде светодиода D2, подключенного параллельно преобразователю При постоянном значении выходного тока транзистора Т1 генератора 2 напряжение на инструменте 3, колеблющемся на собственной резонансной частоте, миютмально. Таким образом, по минимальному свечению светодиода D2 определяют точку резонанса.
Устройство для ультразвуковой хирургии работает следующим образом.
Выпрямленное напряжение от источника 1 пита1шя подается на генератор 2, в режиме ;самовозбуждения которого на резонансной (или очень близкой к резонансной) частоте, возникает напряжение на зажимах пьезопреобразователя инструмента 3 и схемы 5 выделения напряжения обратной связи. Протекающий через, пьезопреобразователь инструмента 3 ток содержит реактивную составляющую L ), где Ukj - напряжение на пьезоэлементе; Су - статическая емкость пьезоэлемента и активную составляющую l , где R „ - динамическое
сопротивление пьезоэлемента, которое при работе инструмента 3 точно на резонансной частоте является чисто активном (величиной сопротив ления резистора R2 ввиду ее малости можно пренебречь). Ток , проходящий через пьезопр образователь, равный сумме токов 1л у, и jC создает на концах резистора R2 падение напря жения UR2 1«,( Через конденсатор С1 (пренебрегая величиной R1) протекает ток , 1с, u,u.c., Этот ТОК реактивный и создает на зажимах , резистора R1 падение напряже шя UR jlci R. Напряжение обратной связи, снимаемое с концов резисторов R и R2, равно разности паде ний напряжений на них 2-н JicnR2- JiciR Регулируя сопротивления резисторов R1 и R2, получают равенство си t-tR. тогда напряжение обратной связи 11± I I I во Oбp.CB R-1Ra Это напряжение подают на первичную обмотку трансформатора б, со вторичной обмотки кото рого напряжение подают на вход фазовращателя 7. Фаза напряжения обратной связи, снимаемо с потенциометра фазовращателя 7, регулируемая в пределах i (± j), позволяет установить частоту колебаний, точно совпадающую с резонансной частотой инструмента 3, при этом динамическо .входное сопротивление пьезопреобразователя чисто активное и минимально. Козффнциент трансформации трансформатора Т1 генератоpa 2 подбирают таким, чтобы при минимальном входном сопротивлении пьезопреобразователя режим транзистора Т1 был глубоко недонапряженным Подаваемое на вход полосового усилителя 8 с фазовращателя 7 напряжение обратной связи усиливается только в узкой полосе рабочих частот благодаря полосовому фильтру и по своей величине намного превышает значение, необходимое для самовозбуждения генератора 2. С выхода полосового усилителя 8 усиленное напряжение подводят к рег лируемому ограничителю 9, который ограничивает амплитуду напряжения на различных уровнях, определяющих алшлитуду колебаний инструмента 3 с помощью потенциометра R6. Таким образом, амплитуда напряжения обратной связи остается постоянной в широких пределах колебаний тока, проходящего через пьезопреобразователь, что обеспечивает устойчивость режима и малую зависимость амплитуды колебаний инструмента 3 от нагрузки. Глубоко иедонапряженный режим генератора 2 обеспечивает широкий диапазон рабочей нагрузки икструмента 3 и малые потери мощности, а следовательно, и малый нагрев инструмента 3 в отсутствии нагрузки. Действительно, при глубоко недонапряженном режиме генератора 2 он приближается по своей нагрузошой характеристике к генератору тока - сила тока его почти не зависит от сопротивления нагрузки. Ненагружен1Ш Й инструмент 3 обладает малым входным сопротивле шем (активным при работе на резонансной частоте) и выделяемая в нем мощность равна амплитуда переменной составляющей тока генератора 2 (здесь пренебрегается значение тока, протекающего через емкости С1 и СП и компенсирующую индуктивность L); динамическое сопротивление ненагру женного пьезоэлемента. При появлении и дальнейшем увеличении нагрузки инструмент 3 возрастает величина Rj, но ток генератора 2 почти не изменяется, остается постоянной и амплитуда механических колебаний инструмента, а напряжение на инструменте возрастает и с ним возрастает мощность, потребляемая последним. Рабочий режим устройства автоматически поддерживает при всех регулировках мощности работу ультразвукового инструмента 3 на резонансной частоте. Установ.леннал на определенном уровне амплитуда колебаний инструмента стабильна во времени, и при нагруженйи последнего на биологическую ткань уменьшается не более,чем на 20% по сравнению с режимом колебаний без нагрузки. Аппарат обеспечивает получение амплитуды колебашй инструмента до 50 мкм при подводимой электрической мощности 6 Вт. Устройство применено при проведении 21 операции (дакриоцисториностолош, по поводу отслоек сетчатки). Оно обеспечивает сокращение продолжительности операций в 2-3-раза при одновременном повышении их качества и снижении травматичности, что ускоряет заживление на 2-3 дня, кроме того, повышена надежность инструмента в процессе длительных операций. Формула изобретения J. Устройство для ультразвуковой хирургам, одержащее последовательно соединенные енератор ультразвуковой частоты с преобразоваелем злектрическнх колебаний в механические, абочий инструмент с датчиком колебаний интрумента, схему обратной связи и схему сгаб|ь изации амплитуды инструмента, отличаюееся тем, что, с целью уменьшения травматячностн, в нем схема обратной связи и схема стабилязащш амплит}щы инструмента вьтолнены в виде последовательно соединенных схемы выделения напряжения обратной связи, трансформатора, фазовращателя, полосового усилителя, регулируемого ограничителя и усилителя напряжения, причем вход схемы вьзделения напряжения обратной связи соединен с выходом дагшка колебаний инструмента, а йыход усюштеля напряжения соединен со входом генератора ультразвуковой частоты. 2. Устройство по п. 1, о т л и ч а ю щ е е с я тем, что преобразователь электрических 8
// 8 колебаний в механические н датчик колебаний инструмента выполнены в виде единого пьезопреобразователя. 3. Устройство по п. 1, о т л я ч а ю щ ее с я тем, что в него введен индикатор резонанса, выполненный в виде светодиода, соединенного с датчиком колебаний инструмента. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР М 578065, кл. А 61 В 17/32, 1975.
iHCb
,U№№3
