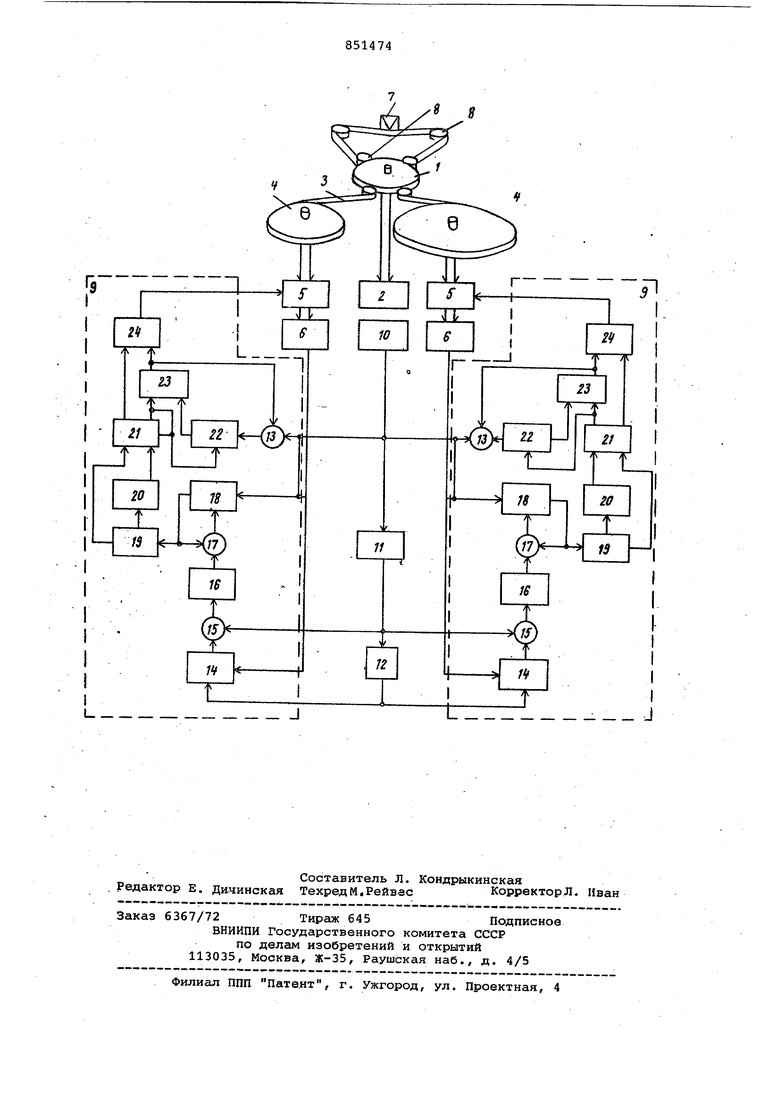
Изобретение относится к нриборостроению и может быть использовано при построении запоминающих устройст с большим объемом информации. Известен лентопротяжный механизм содержащий один двигатель, кинематически соединенный с первым и вторым дифференциалом, другой двигатель, кинематически соединенный с другим входом первого дифференциала и через паразитную шестерню с другий вхо дом второго дифференциала, выходы дифференциалов кинематически соединены с вгшами катушек, кинематически связанных друг с другом через магнитную ленту tl3 . Недостатки такого механизма сложность кинематической схемы и наличие люфтов в зубчатых передачах, что уменьшает надежность и стабильность работы.механизма. Наиболее близким к предлагаемому является лентопротяжный механизм, содержащий ведущий вал, кинематичес ки связанный с первым двигателем и через магнитную ленту с двумя катуш ками, кинематически связанными с вт рым и третьим двигателем, блоки упргшления С21. Необходимая точность натяжения магнитной ленты в известном механизме поддерживается двумя системами, одна из которых содержит датчики натяЖения и первн.й и второй блоки управления, а другая - датчики положения, четвертый и пятый двигатели, третий и четвертый блоки управления. Недостаток механизма - низкая надежность, связанная с большим количеством электромеханических элементов. Цель изобретения - повышение надежности работы лентопротяжного механизма. поставленная цель достигается тем, что лентопротяжный механизм, содержайий ведущий ВсШ, кинематически связанный с первым двигателем и через магнитную ленту с двумя катушками, . кинематически связанными с вторым и третьим двигателями, блоки управления, введены два датчика скорости вращения двигателей, кинематически связанные с вторым и третьим двигателями и подключенные соответственно к первым входам блоков управления, последовательно соединенные генератор импульсов, делитель частоты и элемент задержки, выходы которых подключены к вторым, третьим и четверт зш входам блоков управления соответственно при этом каждый из блоков управления выполнен из элемента И и последователь но-соединенных первого счетчика, пер вого блока .элементов И, регистра, второго блока элементов И, второго и третьего счетчиков, дешифратора, пер feoro триггера, четвертого счетчика, второго триггера и элемента ИЛИ, выход которого связан с соответствующи двигателем, причем входы первого сче чика соединены с первым и четвертым входом блока управления, второй и третий входы которого подключены соответственно к объединенным второму входу второго счетчика и первому вхо ду элемента Ии к управляющему входу первого блока элементов И, выход вто рого счетчика подключен к управляющему входу второго блока элементов И, выход переполнения третьего счетчика соединен со вторым входом первого триггера, второй выход которого подключен к второму входу элемента ИЛИу второй вход четвертого счетчика подключен к выходу элемента И, второй вход которого связан с выходом второго триггера, а второй вход последнего подключен к первому выходу первого триггера. На чертеже изображен лентопротяжный механизм, структурная схема. Механизм содержит ведущий вал 1, кинематически связанный с двигателем 2 и через магнитную ленту 3 с катушками 4, кинематически связанными с двигателем 5 -и датчиками б скорости вращения двигателей, магнитную голов ку 7 и обводные ролики 8, Выходы дат чиков 6 подключены к первым входам блоков 9 управления, последовательно соединенные генератор 10 импульсов, делитель 11 частоты и элемент 1 задержки, выходы которых подключены к вторым, третьим и четвертым входам блоков 9 управления соответственно. Каждый из блоков 9 управления выполнен из элемента И 13, и последовательно соединенных первого счетчика .14, первого блока 15 элементов И, регистра 16, второго блока 17 элементов И ,, второго и третьего счетчиков 18 и 19, дешифратора 20, первого триггера 21, четвертого счетчика 22, второго триггера 23 и элемента ИЛИ 24. Счетный и установочный входы сче чика ,14 соединены соответственно с первьйл ..и четвертым входом блока 9 управления, второй вход блока 9 под ключен к объединенным счетному входу счетчика 1В и сигнальному входу эле мента И 13, а третий вход блока 9 соединен с управляющим входом блока 15 элементов И. Выходы разрядов счетчика 14 через блоки 15 элементо И подключены к регистру 16. Выход р гистра 16 через блок 17 элементов И подключен к управляющему входу счетчика 18 импульсов, счетный вход которого соединен с генератором 10. импульсов, а выход подключен к управляющему входу блока 17 элементов И и к .счетному входу счетчика 19 импульсов, выход переполнения которого подключен к одному входу триггера 21, а выход разрядов счетчика 19 через дешифратор 20 подключён к другому входу тй иггера 21, один выход которого подклю|чен к установочному входу счетчика 22 импульсов и одному входу триггера 23, а другой выход подключен к элементу ИЛИ 24, другой вход триггера 23 соединен с выходом счетчика 22, а выход подключен к элементу ИЛИ 24 и к управляющему входу элемента И 13, выходы элементов ИЛИ 24 подключены к двигателям 5. Устройство работает следующим образом. Двигатели 5 работают в режиме датчиков момента, вращая катушки 4 в противоположных направлениях, создавая натяжения магнитной ленты, достаточное для исключения ее проскальзывания относительно вала 1. Натяжение магнитной ленты 3 в области магнитной головки 7 определяется натяжением магнитной ленты в граничный момент исключения ее проскальзывания относительно вала 1. Перемещение магнитной ленты 3 относительно магнитной головки 7 осуществляется двигателем 2, вращающим вал 1. В зависимости от направления перемещения одна из катушек 4 является приемной, а другая - подающей. Моменты от двигателей 5, прикладываемые к валу 1, направлены в противоположные стороны и частично компенсируются. Для их полной компенсации необходимо выровнять натяжение магнитной ленты 3 между валом 1 и катушками 4. Поскольку диаметры катушек 4 с намотанной на них магнитной.лентой 3 могут значительно отличаться друг от друга, введено регулирование моментов двигателей 5 в. зависимости от диаметров катушек 4. Регулирование производится с помощью датчиков 6 и блоков 9 управления, преобразующих выходную частоту датчиков б в широтно-импульсные сигналы напряжения питания, модулированные по длительности в зависимости от изменения угловой скорости ш вращения катушек 4. Для определения скорости о импульсуются датчики 6, выполненные, например, в виде накапливающего нереверсивного преобразователя угла в число импульсов перемещения. Частота выходных импульсов датчика 6 пропорциональна скорости ш вращения катушки 4 независимо от направления ее вращения. Выходные импульсы датчика б поступают на счетный вход счетчика 14, состояние которого периодически опрашивается выходными импульсами делителя 11, именвдего коэффициент К передачи. После каждого опроса счетчик 14 обнуляется выходными импульсами элемента 12 задержки. Выходной код Д, (,) (где ff - выходная частота генерато ра 10) счетчика 14 через блок 15 эле ментов И поступает в регистр 16 для временного Хранения этого кода. Код N с выхода регистра 16 через блок 17 элементов И поступает на управлярдие входы счетчика 18 импульсов час тоты генератора 10. Кажддам выходным импульсом с-ieтчикa 18 на его управля щие входы заносится через блок 17 эл ментов И новое значение кода N-,. Выходная частота f-i импульсов счетчика 18 обратно пропорциональна коду N или угловой скорости Lf вращения катушки 4, выраженной в частоте fд выходных импульсов датчика 6 f ги К I Выходные импульсы счетчика 18 по считываются счетчиком 19. Импульс переполнения счетчика 19 предыдущего цикла перебрасывает три гер 21 и на выходе элемента 24 формируется высокий потенциал. По достижёнию K/j импульсов в счетчике 19 срабатывает дешифратор 20, осуществля обратный переброс триггера 21, переброс триггера 23, установку в О счетчика 22 и открывание элемента 1 Импульсы генератора 10 через элемент 13 поступают на счетный вход счетчика 22, .по переполнению которого пере брайывается триггер 23. Формирование высокого потенциала на выходе элемен та 24 заканчивается. В результате на выходе элемента 24 формируется широтно-импульсный мо дулированный сигнал с периодом 1,2 -рЗ. (tCj - коэффициент передачи счетч ка 19) и длительностью К, - коэффициент передачи счетчи ка 22. Среднее значение выходного напряжения элемента 24 можно представить выражением и -и BL Подставляя в это выражение соот.ношение (2) и (3), получим U, J(K,,.|4- ). (4) п К K-J €ди . Изменяя отдельно постоянные и переменные составлянадие этого вырс1желия, можно по заданным параметрё1М двигателя, натяжения и диапазону при менения угловой скорости (JJ выбрать н обходимые значения коэффициентов и частоты f VI Использование предлагаемого механизма обеспечивает постоянное натяжение магнитной ленты между катушкги и и валом. В результате дополнительные .моменты, прикладываемые к валу и двигателю 2 двигателями 5, взаимно компенсируются. Двигатели 2 и 5 работают в облегченном режиме. Формула изобретения Лентопротяжный механизм, содержащий ведущий вал, кинематически связайный с первым двигателем и через магнитную ленту с двумя катушками, кинематически связанным с вторым и третьим двигателями, блоки управлейия, отличающийся тем, что, с целью повышения надежности работы лентопротяжного механизма, в него введены два датчика скорости вращения двигателей, кинематически связанные с вторым и третьим двигателями и подключенные соответственно к первым входам блоков управления, последовательно соединенные генератор импульсов, делитель частоты и элемент задержки, выходы которых подключены к вторым, третьим и четвертым входам блоков управления соответственно, при этом каждый из блоков управления вы- полней из элемента И и последовательно соединенных первого счетчика, первого блока элементов И, регистра, второго блока элементов И, второго и третьего счетчиков, дешифратора, первого триггера, четвертого счетчика, второго триггера и элемента ИЛИ, выход которого связан с соответствукиаим двигателем, причем входы первого счетчика соединены с первым и четвертым входом блока управления, второй и третий входы которого подключены соответственно к объединенным второму входу второго счетчика и первому ekoRy элемента И и к управлякицему входу первого блока элементов И, выход второго счетчика подключен к управляющему входу второго блока элементов И, выход переполнения третьего счетчика соеди эеч со вторым входом первого триггера, второй выход которого подключён к второму входу элемента ИЛИ, второй вход четвертого счетчика подключей к выходу элемента И, второй вход которого связан с выходом второго триггера, а второй вход последHefo подключен к первому выходу первого триггера. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР 613394, кл. G 11 В 15/43, 27.05.76. 2.Авторское свидетельство СССР 539329, кл. 6 11 В 15/43, 23.12.75 (прототип).
Л
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования скорости лентопротяжного механизма | 1988 |
|
SU1501002A1 |
| Устройство для управления движением магнитной ленты в реверсивном лентопротяжном механизме | 1985 |
|
SU1254554A1 |
| Устройство для регулирования скорости лентопротяжного механизма | 1985 |
|
SU1298726A1 |
| Аппарат магнитной записи | 1982 |
|
SU1064312A1 |
| Аппарат для намотки магнитной ленты в кассету | 1980 |
|
SU878709A1 |
| Устройство для управления скоростью перемещения магнитной ленты | 1982 |
|
SU1062779A2 |
| Устройство для индикации количества магнитной ленты в аппарате магнитной записи | 1979 |
|
SU788166A1 |
| Устройство для перемотки магнитной ленты | 1982 |
|
SU1123053A1 |
| Устройство для перемещения магнитной ленты | 1990 |
|
SU1705865A1 |
| Устройство для магнитной записи и воспроизведения цифровой информации | 1980 |
|
SU862194A1 |
J
