1
Изобретение относится к области систем стабилизации линейной скорости и натяжения ленточных материалов и может быть использовано, например в устройствах записи и воспроизведения информации на магнитной ленте, намоточных станках, линиях по производству полимерных материалов.
Целью изобретения является упрощение устройства и повышение качества намотки ленты.
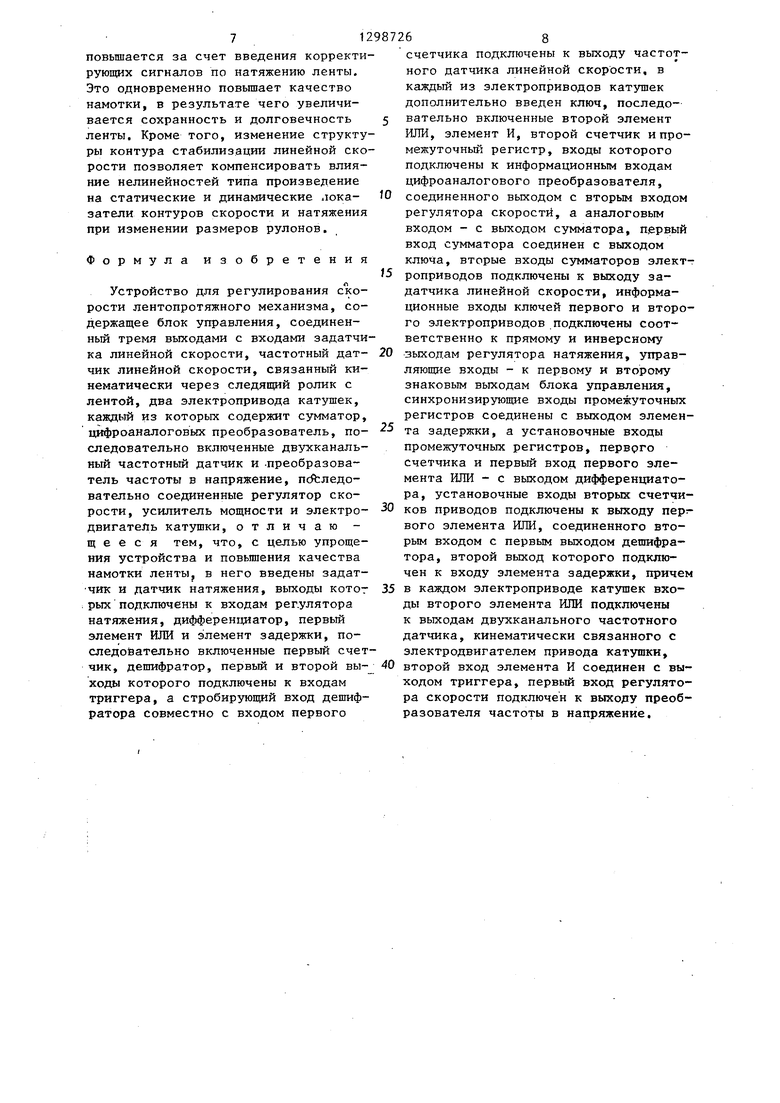
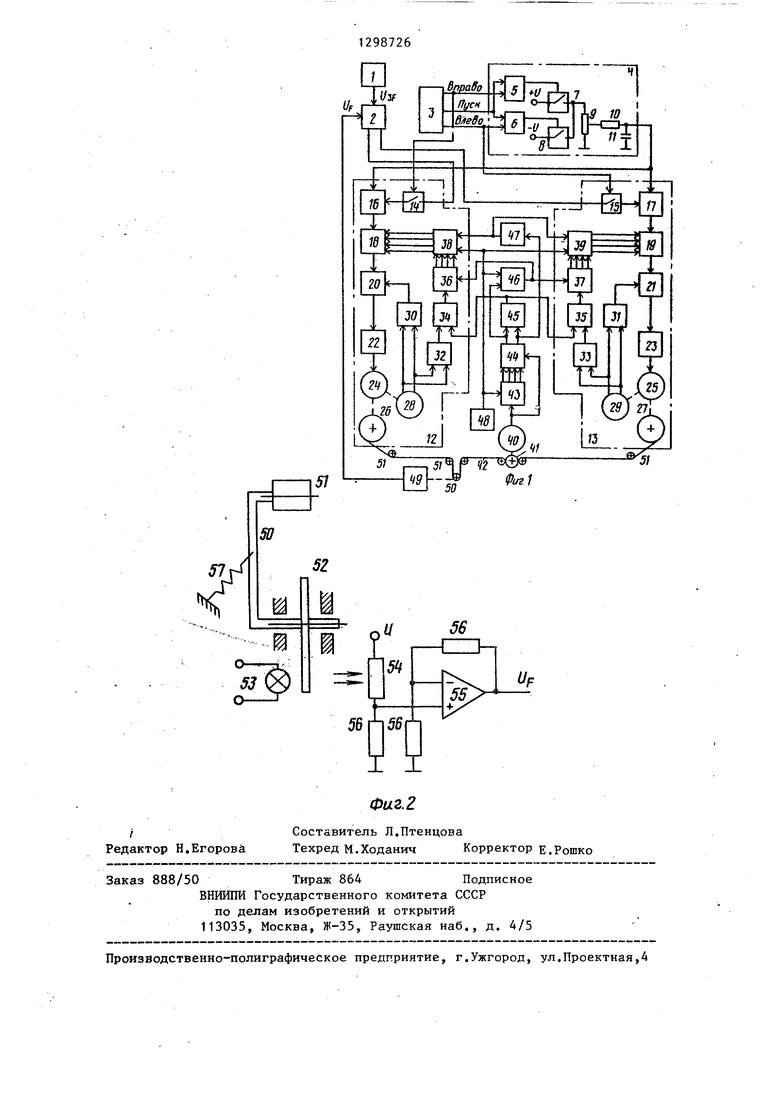
На фиг.1 представлена функционалная схема устройства; на фиг.2 - функциональная схема датчика натяжения.
Устройство (фиг.1) содержит последовательно соединенные задатчик 1 натяжения и регулятор 2 натяжения (РН), последовательно включенные блок 3. управления и задатчик 4 линейной скорости, содержащий два элемента И 5 и 6, первые входы которых подключены соответственно к первому и второму знаковым входам блока уп
равления, а вторые - совместно ко входу Пуск, выходы элементов И 5 и 6 соединены с управляющими входами ключей 7 и 8, информационные входы которых подключены к плюсу и минусу источника питания U относительно его общей точки, а выходы - к задающему потенциометру 9, скользящий контакт которого подключен к входу КС фильтра, содержащего резистор 10 и конденсатор 11.
Выход задатчйка 4 подключен к электроприводам катушек 12 и 13, состоящих соответственно из последовательно включенных ключей 14 и 15, сумматоров 16 и 17, цифроаналоговых , прехэбразователей 18 и 19, регуляторов 20эи 21 скорости, усилителей 22 и 23 мощности, электродвигателей 24 и 25, связанных кинематически с катушками 26 к 27 и двухканальными частотными датчиками 28 и 29, выходы которых подключены соответственно к входам преобразователей 30 и 31 часДиафрагма закреплена на оси. Н тяжение ленты в тракте определяет пружиной 57, один конец которой с
тоты в напряжение и вторых элементов ИЛИ 32 и 33, последовательно сое--50 зан с рычагом 50, а другой конец диненных элементов И 34 и 35, вторых зафиксирован.
счетчиков 36 и 37, промежуточных ре- Устройство работает следующим гистров 38 и 39.
Устройство содержит также последо- вател ьно включенные частотный датчик 5 40 линейной скорости, кинематически связанный через следящий ролик 41 с ле.нтой 42, первьй счетчик 43, дешифобразом.
. Поддержание линейной скорости ты на заданном уровне осуществляе за счет формирования гиперболичес зависимости скорости вращения кат ки о) от радиуса рулона R:
5
0
5
ратор 44, первый выход которого соединен с первыми входами триггера 45 и первого элемента ИЛИ 46, второй вы ход - к второму входу триггера 45 и входу элемента 47 задержки. Установочные -входы счетчика 43 промежуточных регистров 38 и 39 и второй вход элемента ИЛИ 46 подключен к выходу дифференциатора 48.
Лентопротяжное устройство содержит датчик 49 натяжения, взаимодействующий с лентой через рычаг 50, и обводные ролики 51,
Выходы регистров 38 и 39 подключены соответственно к информационным входам ид1фроаналоговых преобразователей 18 и 19, преобразователей 30 и 31 частоты в напряжение - к входам регуляторов 20 и 21 скорости, вторые входы сумматоров 16 и 17 - к выходу RC-фильтра,состоящего из резистора 10 и конденсатора 11, информационные входы ключей 14 и 15 - к инверсному и прямому выходам регулятора 2, а управляющие входы - к первому и второму знаковым выходам блока управления.
Синхронизирующие входы регистров 38 и 39 соединены с выходом элемента 47 задержки, установочные входы счетчиков 36 и 37 подключены к входам элемента ИЛИ 46. Первые входы элементов И 34 и 35 соединены соответственно с выходами элементов ИЛИ 5 32 и 33, а вторые - с выходами триггера 45. Выход датчика 49 натяжения подключен ко второму входу регулятора 2 натяжения.
Датчик натяжения (фиг,2) содержит поворотный рычаг 50, взаимодействующий с лентой через обводной ролик 51, диафрагму 52, соединенную с рычагом, осветитель 53, фоторезистор 54, опера дионный усилитель 55, ре- 5 зисторы 56,
Диафрагма закреплена на оси. Натяжение ленты в тракте определяется пружиной 57, один конец которой свя
0
0
0 зан с рычагом 50, а другой конец зафиксирован.
Устройство работает следующим
образом.
. Поддержание линейной скорости ленты на заданном уровне осуществляется за счет формирования гиперболической зависимости скорости вращения катушки о) от радиуса рулона R:
V
Для иггмерения величин, обратно пропорциональных радиусам рулонов, на принимающей и подающей бобинах используется косвенный способ, основанный на реализации соотношения
1 R
gj
r
При этом величина, обратно пропорциональная радиусу .рулона, формирует ся следующим образом. С помощью счетчика A3 дешифратора 44 и триг- гера 45 осуществляется преобразование импульсов датчика 40 в интервал времени. На выходах дещифратора 44 в моменты перехода счетчика 43 через нулевое и максимальное значения фор- мируются сигналы Начало периода и Конец периода, по которым происходит опрокидывание триггера 45 и возврат его в исходное состояние. Дпя исключения ложных импульсов на вы- ходах дешифратора в моменты перехода счетчика из одного состояния в другое сигналы дешифратора дополнительно стробируются импульсами датчика 40. Таким образом, на выходе триггера 45 формируется сигнал, длительность которого равна
счетчика;
RV
частота импульсов на. выходе частотного дат- чика 40; :„ число импульсов на оборот
датчика;
- радиус следящего ролика 41. Сигнал с выхода триггера 45 по- дается на элементы И 34, 35, где он заполняется импульсами соответствующего частотного датчика 28, 29. По .окончании периода числа, соответствующие количеству импульсов, посту- пивщих в счетчики 36 и 37, переписываются в регистры 38 и 39. Обеспечение уверенной записи в прометкуточ- ных регистрах 38 и 39 достигается за счет з адержки импульсов, поступа- ющих на синхронизирующие входы регистров, элементом 47 задержки. Вре- мя задержки при этом должно превышат
время переходных процессов в счетчике. Числа, записанные в регистры, равны
N
t,2
N
где f
z
1,2 u,-,
, f
-1,«
02 ЗГ
частота импульсов соответственно на выходах датчиков 28 и 29;
,,2 угловая скорость вращения двигателей. 24 и 25, о .числе кмпульсов на оборот датчика,
К.
.щ теш
- коэффициент пропорциональности ;
,2
R
1,2
R
U
- относительные радиу- сы рулонов;
-радиусы рулонов ленты на i катушках 26 и 27;
-максимальный радиус р:,-ло- на.
Каждый цикл преобразований начинается с предварительного сбр.оса счетчика 36 и 37, осуществляемого по сигналу Начало цикла и поступающего на элемент ИЛИ 46. Таким образом формируются коды чисел, обрат- но пропорциональные относительным радиусам рулонов г., и г на принимающей и подающей катушках.
Движение ленты начинается при подаче сигнала Пуск блоком управления. В зависимости от сигналов направления движения ленты Вправо или Влево с помощью элементов И 5, 6 и ключей 7 и 8 на потенциометр 9 задатчика линейной скорости подается напряжение соответствующего знака. На выходах цифроаналоговых преобразователей 18 и 19 формируются гиперболические напряжения:
N,
1,а
.7
U
где
коэффициент пропорциональности , -и - сигналы на выходах сумматоров 17 и I6i если перемотка ленты идет вправо.
- напряжение на датчика 4;
выходе
К.
лятора 2 натяжения; - коэффициент передачи циф- роаналогового преобразователя.
При этом с помощью электропривода принимающей катушки (при движении вправо - это электропривод 13) осуществляется регулирование угловой скорости двигателя 25 в соответствии с изменяющимся радиусом рулона R.,, а электропривода 12 подающей катушки - натяжение ленты. Основным режимом работы электропривода принимающей катушки является двигательный, а подающей - тормозной.
В процессе перемотки ленты радиус рулона принимающей катушки увеличивается, что вызывает уменьшение числа NO и соответствующее уменьшение выходного напряжения цифроаналогово- го преобразователя 19, которое отрабатывается скоростным контуром, включающим регулятор 21 скорости, усилитель 23 мощности, двигатель 25, частотный датчик 29 и преобразователь 31 частоты в напряжение. На подающей катушке за счет уменьшения радиуса рулона происходит соответст- вующее увеличение кода N на выходе промежуточного регистра 38 и увеличение ее частоты вращения. Дополнительным с 1гналом, корректирующим разность линейных скоростей концов ленты на участке между катушками, является сигнал с выхода регулятора 2 натяжения.
В зависимости от натяжения ленты изменяется угол поворота рычага 50 и связанной с ним диафрагмы 52 (фиг. 2), что- приводит к изменению уровня освещенности фоторезистора 54, включенного в плечо двигателя. Изменение коэффициента передачи делителя вызывает соответствующее изменение напряжения на неинвертирующем входе операционного усилителя 55, включенного по схеме повторителя. При этом сигнал Up с выхода датчика натяжения пропорционален интегралу от разности линейных скоростей концов ленты, что определяет астатический закон регулирования по разности линейных скоростей ленты на участке межр;у катушками.
Сигнал рассогласования (U -Up) между заданием выхода за- датчика натяжения 1 и обратной свя
0
5
0
5
0
5
0
5
0
5
зью Up с выхода датчика 49 натяжения вызывает уменьшение сигнала U. на выходе сумматора 16 при U «U и увеличение его при U и . Тем Самым осуществляется изменение результирующего сигнала задания на линейную скорость,, поступающего на цифро- аналоговый преобразователь 18, который затем преобразуется в величину, обратно пропорциональную текущему радиусу рулона подающей катушки 27 и отрабатывается электроприводом.
Сигнал обратной связи по частоте вращения двигателей формируется с помощью частотных датчиков 28 и 29 и преобразбвателей 30 и 31 частоты в напряжение. При этом амплитуда напряжения на выходе преобразователей определяется частотой поступления импульсов, а знак каналом их прохождения.
Для определения радиусов рулонов при обоих направлениях вращения импульсы частотных датчиков объединяются злемента1чи ИПИ 32 и 33,
При реверсе направления движения ленты одновременно изменяется знак задания на линейную скорость и сигнала рассогласования по натяжению. Это достигается путем коммутации на- гфяжений +U, -и ключами 7, 8 и прямого , и инвертированного - V напряжений рассогласования по натяжению ключами 15 и 14.
При подаче питания на устройство на выходе дифференциатора 48 формируется одиночный импульс, который обнуляет счетчики 36 и 37 и устанавливает регистры 38 и 39 в состояния, соответствующи;е максимальному значению радиуса на подающей кассете и соответственно максимальному значению радиуса рулона на принимающей кассете. Формирование темпа разгона и торможения осуществляется с помощью фильтра, включающего резистор 10 и конденсатор 11.
Таким образом, изменение принципа работы и введение новых элементов в предлагаемое устройство позволяет значительно улучшить весогабаритные показатели за счет отказа от громоздкой вакуумной системы и перехода надвухдви- лательную систему лентопротяжного механизма. Несмотря на упрощение системы стабилизации линейной скорости, точность синхронизации линейных скоростей на участках между катушками
повьшается за счет введения корректирующих сигналов по натяжению ленты. Это одновременно повышает качество намотки, в результате чего увеличивается сохранность и долговечность ленты. Кроме того, изменение структуры контура стабилизации линейной скорости позволяет компенсировать влияние нелинейностей типа произведение на статические и динамические показатели контуров скорости и натяжения при изменении размеров рулонов.
Формула изобретения
25
Устройство для регулирования скорости лентопротяжного механизма, содержащее блок управления, соединенный тремя выходами с входами задатчи- ка линейной скорости, частотный дат- 20 чик линейной скорости, связанный кинематически через следящий ролик с лентой, два электропривода катушек, каждый из которых содержит сумматор, цйфроаналоговьгх преобразователь, последовательно включенные двухканаль- ный частотный датчик и -преобразователь частоты в напряжение, псЯ;ледо- вательно соединенные регулятор скорости, усилитель мощности и электродвигатель катущки, отличаю - щ е е с я тем, что, с целью упрощения устройства и повьшения качества намотки лентыJ в него введены задат- чик и датчик натяжения, выходы котог ; рых подключены к входам рег.улятора натяжения, дифференциатор, первый элемент ИЛИ и элемент задержки, по- следойательно включенные первый счетсчетчика подключены к выходу частотного датчика линейной скорости, в каждый из электроприводов катушек дополнительно введен ключ, последовательно включенные второй элемент ИЛИ, элемент И, второй счетчик и промежуточный регистр, входы которого подключены к информационным входам цифроаналогового преобразователя, соединенного выходом с вторым входом регулятора скорости, а аналоговым входом - с выходом сумматора, п,ервый вход сумматора соединен с выходом ключа, вторые входы сумматоров электроприводов подключены к выходу за- датчика линейной скорости, информационные входы ключей первого и второго электроприводов подключены соответственно к прямому и инверсному выходам регулятора натяжения, управляющие входы - к первому и второму знаковым выходам блока управления, синхронизирующие входы промежуточных регистров соединены с выходом элемента задержки, а установочные входы промежуточных регистров, первого счетчика и первый вход первого элемента ИЛИ - с выходом дифференциатора, установочные входы вторых счетчиков приводов подключены к выходу пер:- вого элемента ИЛИ, соединенного вторым входом с первым выходом дешифратора, второй выход которого подключен к входу элемента задержки, причем в каждом электроприводе катушек входы второго элемента ИЛИ подключены к выходам двухканального частотного датчика, кинематически связанного с электродвигателем привода катушки.
30
35
чик, дешифратор, первый и второй вы- 40 второй вход элемента И соединен с выхода которого подключены к входам ходом триггера, первый вход регулято- триггера, а стробирующий вход дешиф- ра скорости подключен к выходу преоб- ратора совместно с входом первого разователя частоты в напряжение.
5
10
J5
25
20 987268
счетчика подключены к выходу частотного датчика линейной скорости, в каждый из электроприводов катушек дополнительно введен ключ, последовательно включенные второй элемент ИЛИ, элемент И, второй счетчик и промежуточный регистр, входы которого подключены к информационным входам цифроаналогового преобразователя, соединенного выходом с вторым входом регулятора скорости, а аналоговым входом - с выходом сумматора, п,ервый вход сумматора соединен с выходом ключа, вторые входы сумматоров электроприводов подключены к выходу за- датчика линейной скорости, информационные входы ключей первого и второго электроприводов подключены соответственно к прямому и инверсному выходам регулятора натяжения, управляющие входы - к первому и второму знаковым выходам блока управления, синхронизирующие входы промежуточных регистров соединены с выходом элемента задержки, а установочные входы промежуточных регистров, первого счетчика и первый вход первого элемента ИЛИ - с выходом дифференциатора, установочные входы вторых счетчиков приводов подключены к выходу пер:- вого элемента ИЛИ, соединенного вторым входом с первым выходом дешифратора, второй выход которого подключен к входу элемента задержки, причем в каждом электроприводе катушек входы второго элемента ИЛИ подключены к выходам двухканального частотного датчика, кинематически связанного с электродвигателем привода катушки.
30
35
40 второй вход элемента И соединен с выходом триггера, первый вход регулято- ра скорости подключен к выходу преоб- разователя частоты в напряжение.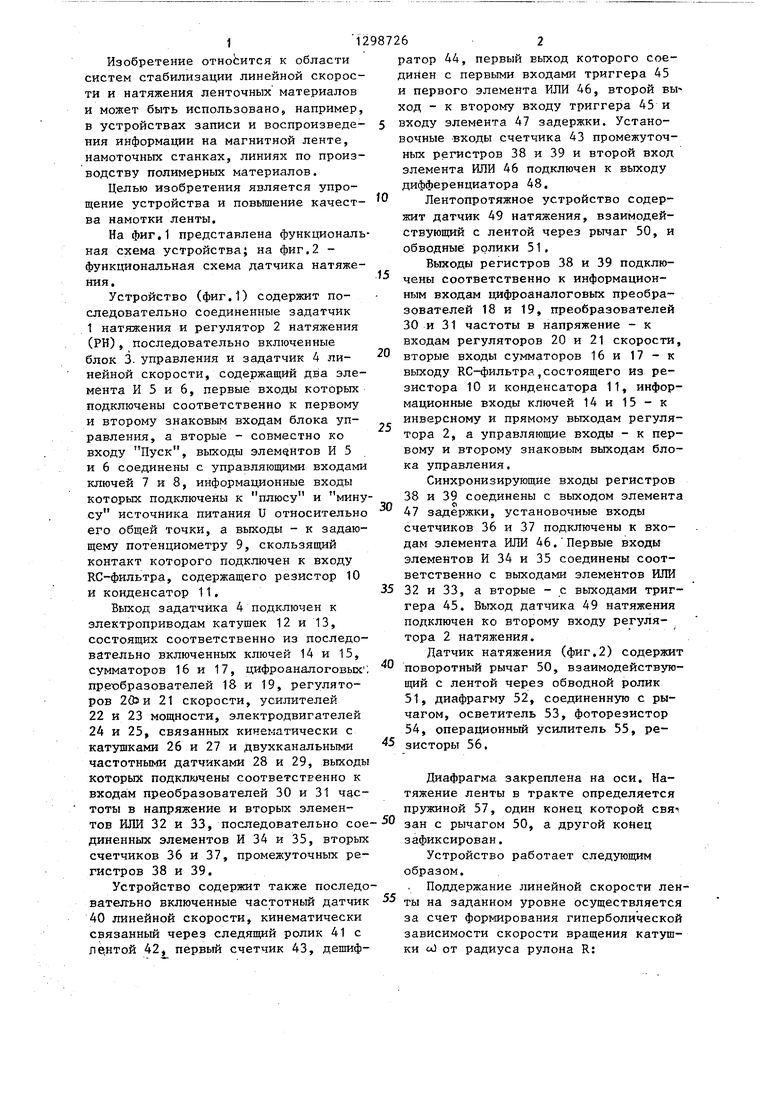
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования скорости лентопротяжного механизма | 1988 |
|
SU1501002A1 |
| Устройство для перемещения магнитной ленты | 1990 |
|
SU1697113A1 |
| Устройство для перемещения магнитной ленты | 1990 |
|
SU1705865A1 |
| Устройство для перемещения магнитной ленты | 1989 |
|
SU1670699A1 |
| Система для программного управления правильной машиной | 1986 |
|
SU1327065A1 |
| Система автоматического управления непрерывным агрегатом для обработки рулонов | 1988 |
|
SU1639817A1 |
| Система автоматического управления трубогибочным станом | 1987 |
|
SU1505624A1 |
| УСТРОЙСТВО ДЛЯ КАРОТАЖНЫХ ЭЛЕКТРОМАГНИТНЫХ СКАНИРУЮЩИХ ЗОНДИРОВАНИЙ | 2010 |
|
RU2421760C1 |
| Устройство для управления токарнымСТАНКОМ | 1979 |
|
SU830314A1 |
| Цифровой следящий электропривод | 1985 |
|
SU1308982A1 |
Изобретение относится к системам автоматического управления и может быть использовано в устройствах записи и воспроизведения информации, намоточных станках, линиях по производству полимерных материалов. Целью изобретения является упрощение устройства и повышение качества намотки ленты. Цель достигается путем изменения контуров управления двухдвигательным электроприводом и введением йовых элементов. Поддержание линейной скорости ленты на заданном уровне достигается за счет формирования гиперболических зависимостей скоростей вращения катушек от радиусов рулонов. При этом величина задания на скорость вращения электродвигателя катушки формируется путем перемножения напряжения задания линейной скорости и сигнала обратно пропорционального радиусу рулона. Для измерения величин обратно пропорциональных радиусам рулонов используется косвенный метод, основанный на реализации соотношения , где R - радиус рулона; - угловая скорость вращения двигателя (катушки), V - линейная скорость, путем заполнения временных промежутков обратно пропорциональных частоте импульсов частотных датчиков угловой скорости электроприводов катушек. Корректирующим сигналом, ком- пенсирукнцим разность линейных скоростей концов ленты на участке между катзшками, является сигнал с выхода регулятора натяжения, поступакяций на электропривод подающей катушки, что обеспечивает астатический закон регулирования по разности линейных скоо остей на этом участке при заданном натяжении. 2 ил.. с 9 (Л 1чЭ Р Ьо -vj. to О5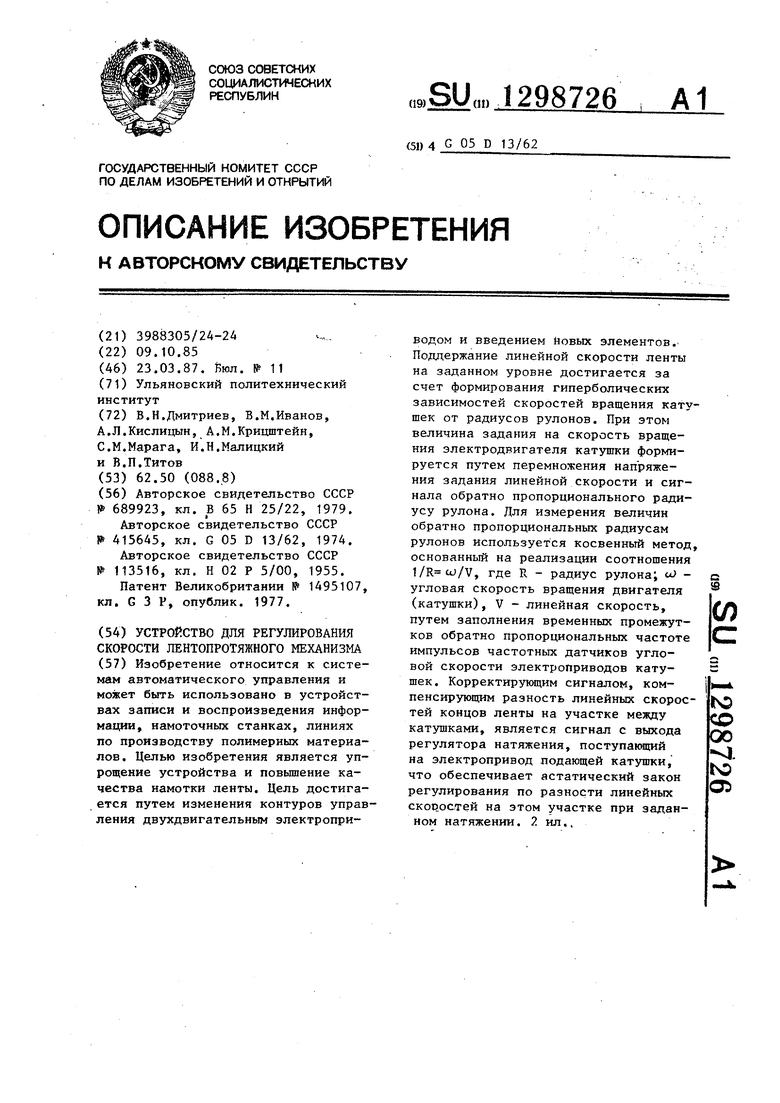
П
Редактор Н.Егорова
Ф(лг.2
Составитель Л.Птенцова Техред М.Ходанич
Заказ 888/50Тираж 864Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная,4
Корректор Е.Рошко
| Авторское свидетельство СССР У 689923, кл | |||
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| 1972 |
|
SU415645A1 | |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для автоматической стабилизации скорости ленты | 1955 |
|
SU113516A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для изготовления абразивного инструмента | 1987 |
|
SU1495107A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Шеститрубный элемент пароперегревателя в жаровых трубках | 1918 |
|
SU1977A1 |
