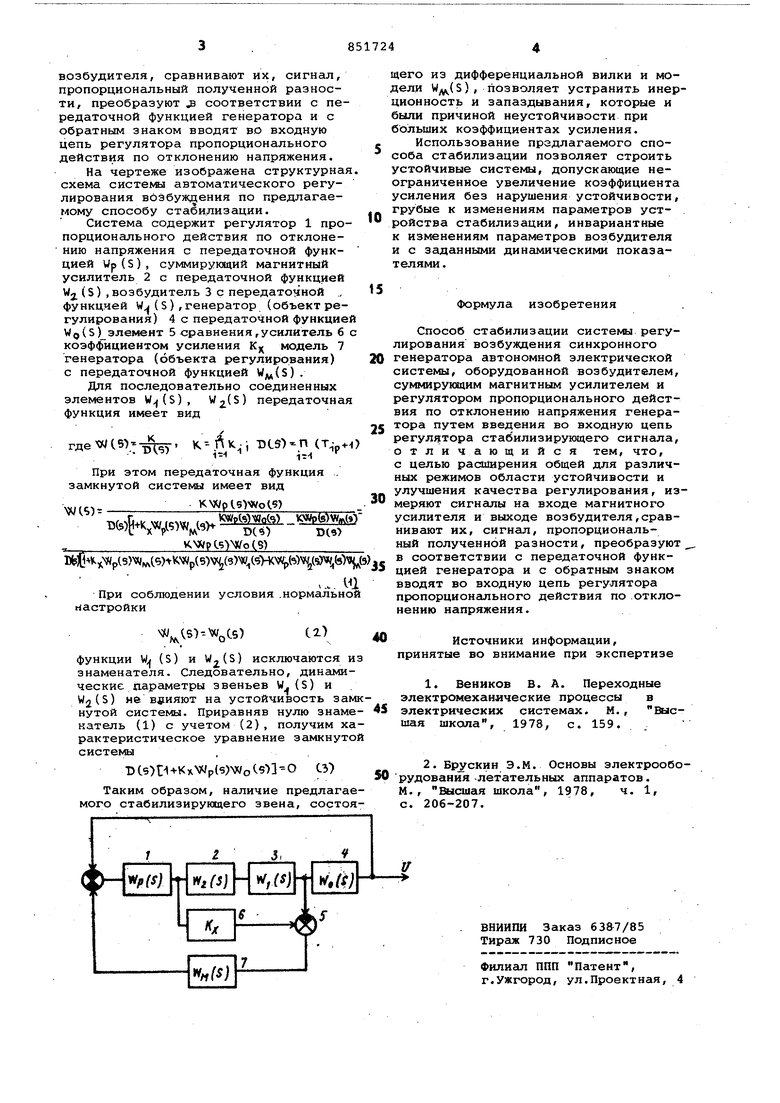
Изобретение относится к автоматическому регулированию возбуждения синхронных генераторов автономной электрической системы (АвЭС), в част ности судовой. Известны способы стабилизации в существующих АвЭС с автоматическими регуляторами возбуждения пропорционального действия (АРВ п..д.) , осуществляемые введением либо большой постоянной времени в измерительный злемент напряжения (медленно действующий корректор напряжения в. устрой стве компаундирования с корректором) либо гибкой отрицательной обратной связи (ГООС), охватывающей возбудитель и увеличивающей его эквивалентную постоянную времени (в регуляторе по отклонению напряжения) Ц. . Наиболее близким по технической сущности к предлагаемому является способ стабилизации системы рвгулиро вания возбуждения синхронного генератора, оборудованной возбудителем, суммирующим магнитным усилителем « регулятором пропорционального действия по отношению напряжения генерато ра путем введения во входную цепь ре гулятора стабилизирующего сигнала. В качестве такого стабилизирующего сигнала использован сигнал гибкой отрицательной обратной связи f2}. Стабилизация системы в этом случае получается за счет замедления процесса регулирования, что может привести к недопустимому снижению качества переходных процессов. Однако к качеству переходных процессов в АвЭС предъявляются высокие требования. Качество электроэнергии, вырабатываемой АвЭС, определяется жесткиьга нормг1ми на изменение напряжения и частоты в переходных и установившихся режимах. Цель изобретения - расширение общей для различных режимов области устойчивости и улучшение качества регулирования. {{остгшленная цель достигается тем, что в способе стабилизации системы регулирования возбуждения синхронного генератора автономной электрической оистекы, оборудованной возбудителем, суитирукхцим магнитным усилителем И регулятором пропорционального действия по отклонению напряжения генератора путем введения во входную цепь регулятора стабилизирующего сигнала,, измеряют сигналы на входе магнитного усилителя -и выходе возбудителя, сравнивают их, сигнал, пропорциональный полученной разности, преобразуют соответствии с передаточной функцией генератора и с обратным знаком вводят вр входную цепь регулятора пропорционального действия по отклонению напряжения. На чертеже изображена структурная схема систеим автоматического регулирования возбуждения по предлагаемому способу стабилизации. Система содержит регулятор 1 пропорционального действия по отклонению напряжения с передаточной функцией Wp(S), суммирующий магнитный усилитель 2 с передаточной функцией Wj (S) .возбудитель 3 с передатоуной ., функцией W(S),генератор (объектрегулирования) 4 с передаточной функцией М9{5)элемент 5 сравнения,усилитель 6 с коэффициентом усиления К модель 7 генератора (объекта регулирования) с передаточной функцией Wд(S) . Для последовательно соединенных элементов W(S), W2(S) передаточная функция имеет вид K-.ftK-i Т)С5)-П ( 1--1 iт При этом передаточная функция замкнутой системы имеет вид ,,.. KWp.5)4Vo(.g) iAv.-r-4w. f-v (s)Wiyjio )NyoCS) )l4N,e)tKWp(6)V(9),b)V(SjWj,(5)y При соблюдении условия .нормально настройки W 5V-%C5) функции W (S) и W2(S) исключаются и знаменателя. Следовательно, динамические параметры звеньев ) и Wj(S) не влияют на устойчивость зам нутой системы. Приравняв нулю знаме натель (1) с учетом (2), получим ха рактеристическое уравнение замкнуто системы ПСв))оСвЯ-0 СЗ) Таким образом, наличие предлагае мого стабилизируквдего звена, состоя щего из дифференциальной вилки и модели Wy(S) , позволяет устранить инерционность и запаздывания, которые и были причиной неустойчивости при больших коэффициентах усиления. Использование предлагаемого способа стабилизации позволяет строить устойчивые системы, допускающие неограниченное увеличение коэффициента усиления без нарушения устойчивости, грубые к изменениям параметров устройства стабилизации, инвариантные к изменениям параметров возбудителя и с заданными динамическими показателями . Формула изобретения Способ стабилизации системы регулирования возбуждения синхронного генератора автономной электрической системы, оборудованной возбудителем, суммирующим магнитным усилителем и регулятором пропорционального действия по отклонению напряжения генератора путем введения во входную цепь регул |тора стабилизирующего сигнала, отличающийся тем, что, с целью расширения общей для различных режимов области устойчивости и улучшения качества регулирования, измеряют сигналы на входе магнитного усилителя и выходе возбудителя,сравнивают их, сигнал, пропорциональный полученной разности, преобразуют в соответствии с передаточной функцией генератора и с обратным знаком вводят во входную цепь регулятора пропорционального действия по отклонению напряжения. Источники информации, принятые во внимание при экспертизе 1. Веников В. А. Переходные электромеханические процессы в электрических системах. М., Высшая школа, 1978, с. 159. 2. Врускин Э.М. Основы электрооборудования-летательных аппаратов. М., Высшая школа, 1978, ч. 1, с. 206-207.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ автоматического регулирования возбуждения синхронного генератора | 1980 |
|
SU892640A1 |
| Способ управления бесщеточной синхронной машиной | 1985 |
|
SU1305821A1 |
| Способ управления бесщеточной синхронной машиной | 1988 |
|
SU1624657A2 |
| АВТОМАТИЧЕСКАЯ МИКРОПРОЦЕССОРНАЯ СИСТЕМА РЕГУЛИРОВАНИЯ НАПРЯЖЕНИЯ ТЯГОВОГО ГЕНЕРАТОРА ТЯГОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2005 |
|
RU2290329C1 |
| Устройство для регулирования возбуждения синхронного генератора | 1986 |
|
SU1376211A1 |
| РЕГУЛЯТОР НАПРЯЖЕНИЯ ДЛЯ СИНХРОННОГО ГЕНЕРАТОРА | 1970 |
|
SU274189A1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2014 |
|
RU2555215C1 |
| Автоматический регулятор возбуждения для синхронного генератора | 1978 |
|
SU752731A1 |
| Способ регулирования возбуждения синхронного генератора приемной части энергосистемы | 1984 |
|
SU1257800A1 |
| АКСИАЛЬНЫЙ УПРАВЛЯЕМЫЙ БЕСКОНТАКТНЫЙ ДВИГАТЕЛЬ-ГЕНЕРАТОР | 2015 |
|
RU2601952C1 |
