(54) СПОСОБ ОПРЕДЕЛЕНИЯ ПЕРЕМЕННОГО ОПРОКИЛЫВАЮЩЕГО МОМЕНТА
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения механических деформаций твердого тела | 1983 |
|
SU1224549A1 |
| СПОСОБ БАЛАНСИРОВКИ РОТОРОВ | 2013 |
|
RU2548373C2 |
| Устройство для измерения механической деформации | 1983 |
|
SU1111035A1 |
| Способ балансировки поршневых машин и устройство для его осуществления | 1980 |
|
SU958888A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРОВ ГИРОСКОПОВ | 2000 |
|
RU2176783C1 |
| ОППОЗИТНЫЙ КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ | 1998 |
|
RU2148744C1 |
| СПОСОБ И УСТРОЙСТВО УРАВНОВЕШИВАНИЯ ВИБРАЦИОННЫХ НАГРУЗОК В РОТОРНЫХ МАШИНАХ | 2004 |
|
RU2282763C2 |
| СПОСОБ ОЦЕНКИ ДИСБАЛАНСА РОТОРА | 1989 |
|
RU2010205C1 |
| СПОСОБ МОНИТОРИНГА МАШИН И СООРУЖЕНИЙ | 2008 |
|
RU2371691C1 |
| СПОСОБ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРОВ И КОЛЕБАТЕЛЬНАЯ СИСТЕМА БАЛАНСИРОВОЧНОГО СТАНКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2077035C1 |
Изобретение относится к технической динамике и может быть использовано при исследовании и доводке поршневых машинных агрегатов.
Известен способ определения переменной составляющей крутящего момента Г1, заключающийся в регистрации угловых ускореиий ротора путем измерения напряжений в спицах махового колеса, установленного соосно валу исследуемой машины.
Недостатком данного способа является необходимость размещения на валу махового колеса с тензодатчиками и токосъемниками или бесконтактного радиопередающего устройства для снятия сигнала с ротора. Это требует больших затрат при препарировке машинного агрегата, увеличивает срок исследования и затрудняет измерение на объектах, находящихся в эксплуатации.
Наиболее близким по ;рехнической сущности и достигаемому эффекту к изобретению является способ измерения моментной составляющей неуравновешенности роторов 2, заключающийся в измерении амплитуды и фазы вибрации вдоль двух параллельных
направлений при вращении ротора на балансировочном станке.
Недостатком данного способа является невозможность измерения опрокидывающего момента.
Целью изобретения является упрощение и ускорение процесса измерения переменного опрокидывающего момента.
10
Поставленная цель достигается тем, что определяют вибрационное ускорение агрегата на частотах, кратных частоте первого порядка, в плоскости, перпендикулярной оси
15 поворотных колебаний, вдоль двух параллельных направлений, одно из которых проходит через ось поворотных колебаний, вызываемых опрокидывающим моментом, а затем опре20деляют переменную составляющую опрокидывающего момента по векторной разности измеренных ускорений на каждой из кратных частот.
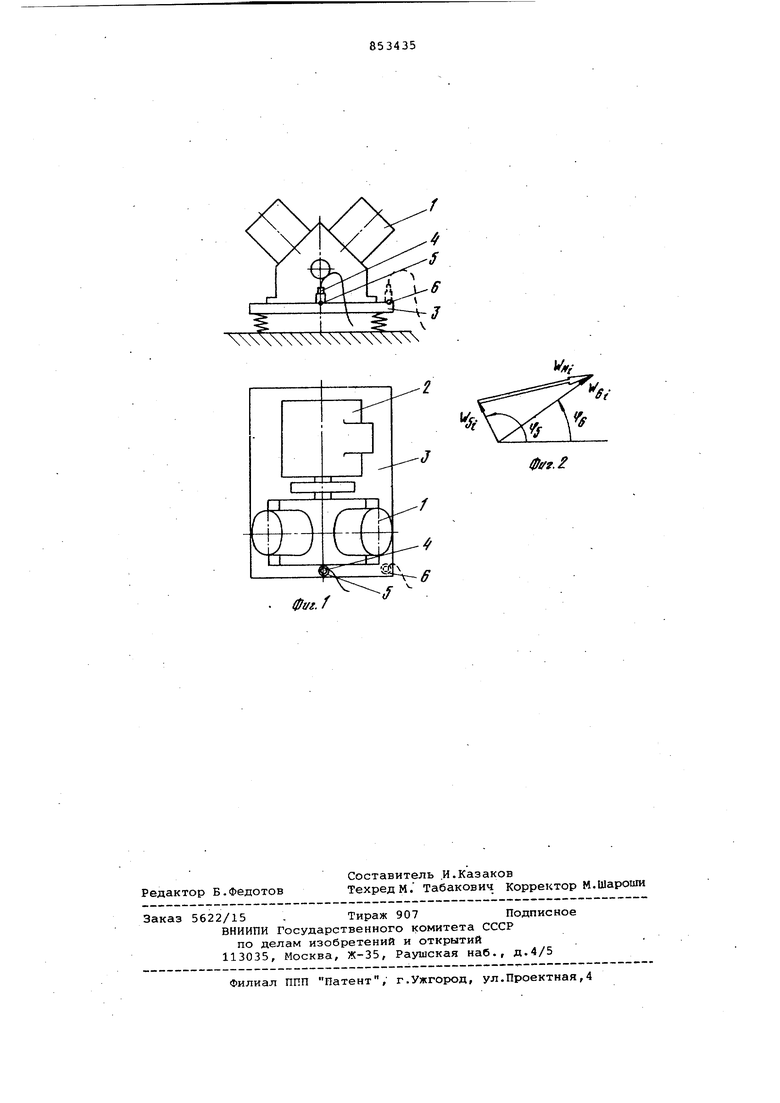
На фиг.1 приведен пример осу25ществления предлагаемого способа при определении опрокидывающего момента электрокомпрессорного агрегата; на фиг.2 - пример определения моментной составляющей ускорения вибрации.
Агрегат, установленный на виброиэоляции, состоит из поршневого компрессора 1 и электродвигателя 2, установленных на раме 3.
На корпусе агрегата выбирают точки установки вибродатчика 4. Точка 5 рамы расположена в вертикальной плоскости симмет ии агрегата, которая проходит через ось его поворота от опрокидывающего момента. Точка 6 рамы расположена на периферийной части рамы на некотором удалении от плоскости симметрии.
После пуска агрегата, установив датчик 4 в точку 5 рамы, записывают уровень и фазу вибрации на частотах, кратных первой частоте опрокидывающего момента , При этом вертикальная вибрация агрегата, регистрируемая датчиком 4 в направлени его главной оси,не содержит поворотной составляквдей от опрокидывающего момента,поскольку главная ось датчик пересекается с осью поворота. Все другие воздействия (например, остаточные статические и моментные дисбалансы, неуравновешенные силы инерции от поступательно ДВИЖУЩИХ частей) вызывают ускорения, регистрируемые датчиком в точке 5.
После этого переносят датчик 4 в точку б рамы и производят аналогичные измерения. Вибрация в точке 6 является векторной (во времени) суммой вибрации, зарегистрированной в точкеN5, и поворотной вибрации корпуса от опрокидывающего момета.
Далее (фиг.2) для каждой из интересующих частот производят векторное вычитание, например графическое, ускорение Wg.точки 5 из ускорения Wf, точки б .
.Модуль разностного вектора показывает величину поворотного ускорения корпуса от действия опрокидывающего момента на радиусе,, равном расстоянию h между точками 5 и б.
Зная момент инерции бч агрегата относительно оси его повооотных колебаний, определяют амплитуду гарМОНИКИ опрокилываюадего момента по формуле
с целью повышения точности измерения посредством дублирования можно точки 6 располагать по обе стороны от точки 5, а измерения производить в нескольких поперечных сечениях корпуса агрегата.
Формула изобретения
Способ определения переменного
опрокидывающего момента агрегата, заключающийся в измерении аплитуды и фазы вибрации вдоль двух параллельных направлений, отличающийся тем, что, с целью упрощения и ускорения процесса измерения, определяют вибрационное ускорение агрегата на частотах, кратных частоте первого порядка, в плоскости, .перпендикулярной оси поворотных колебаний, вдоль двух
параллельных направлений, одно из которых проходит через ось поворотных колебаний , вызываемых опрокидывающим моментом, а затем определяют переменную составляющую
опрокидывающего момента по векторной разности измеренных ускорений на каждой из кратных частот. Источники информации, принятые во внимание при экспертизе
ff.
