Изобретение относится к уравновешиванию машин на фундаменте и может быть использовано для исключения вибраций, передающихся на фундамент от звеньев оппозитного кривошипно-ползунного механизма, входящего в состав машинного агрегата.
Известен оппозитный кривошипно-ползунный механизм с вильчатым шатуном [1] , содержащий стойку с прямолинейной направляющей, установленные в направляющей два идентичных ползуна, кривошип в виде трехколенчатого вала с фиксированной на стойке осью вращения, прямой шатун и вильчатый шатун. Прямой шатун шарнирно связан со средним коленом кривошипа и первым ползуном. Вильчатый шатун двумя боковыми шарнирами связан с крайними коленами кривошипа, а средним шарниром - со вторым ползуном. Центральная точка кривошипа совпадает с точкой пересечения оси вращения кривошипа и продольной оси направляющей ползунов.
При непрерывном вращении кривошипа идентичные ползуны совершают возвратно-поступательное движение вдоль направляющей во взаимно противоположных направлениях. Силы инерции ползунов равны по модулю и противоположны по направлению, при работе механизма они уравновешивают друг друга. Тем самым ползуны исключаются из числа источников вибрации фундамента машины.
При любом угле поворота кривошипа продольные оси прямого и вильчатого шатунов остаются взаимно параллельными, угловые скорости и угловые ускорения шатунов одинаковы по модулю и по направлению. Силы инерции шатунов и кривошипа взаимно на компенсируются. Они приводятся к главному вектору и главному моменту сил инерции, которые определяют статическую и моментную неуравновешенность механизма.
Таким образом, недостатком оппозитного кривошипно-ползунного механизма с вильчатым шатуном является его статическая и моментная неуравновешенность. Как следствие этого, на фундамент машины от механизма передается периодически изменяющаяся динамическая нагрузка, вызывающая вибрацию; вибрация ухудшает условия работы обслуживающего персонала, снижает производительность труда, качество технологического процесса.
Второй недостаток этого механизма связан с наличием избыточной связи. Такой связью является один из двух боковых шарниров вильчатого шатуна. Избыточная связь делает механизм более чувствительным к изменению размеров звеньев, которые возникают при изготовлении деталей, при сборке. Эти отклонения приводят к значительному возрастанию сопротивления движению, к интенсивному износу контактирующих поверхностей. В шарнирных соединениях звеньев увеличиваются зазоры, возникают периодически действующие ударные силы, которые вызывают упругие деформации звеньев и, как следствие, вибрацию машинного агрегата.
Наиболее близким техническим решением по совокупности признаков является оппозитный кривошипно-ползунный механизм по патенту N 2085791 [2]. Он содержит стойку с прямолинейной направляющей, установленные в направляющей два идентичных ползуна, двуплечий кривошип с фиксированной на стойке осью вращения, два идентичных шатуна, каждый из которых шарнирно соединен с соответствующим ползуном и плечом кривошипа. Центральная точка кривошипа совпадает с точкой пересечения оси вращения кривошипа и продольной оси направляющей ползунов. Кривошип выполнен в виде полого вала. Шарниры, связывающие концы шатунов с соответствующими плечами кривошипа, выполнены сферическими и установлены на внутренней поверхности полого вала в диаметрально противоположных точках. Продольная ось направляющей ползунов пересекает ось вращения кривошипа под острым углом.
В данном механизме отсутствуют избыточные связи, поэтому по сравнению с кривошипно-ползунным механизмом с вильчатым шатуном его шарнирные соединения звеньев более износоустойчивы; у данного механизма слабее выражена тенденция к возникновению ударных взаимодействий и упругих деформаций контактирующих поверхностей звеньев. Как следствие этого, кривошипно-ползунный механизм с полым валом имеет меньшую виброактивность.
Идентичность ползунов, идентичность шатунов и геометрическая симметрия механизма относительно центральной точки кривошипа обеспечивают выполнение важного условия уравновешивания: при движении механизма его центр масс постоянно находится в неподвижной центральной точке кривошипа, ускорение центра масс равно нулю. Это означает, что главный вектор сил инерции механизма всегда равен нулю, - кривошипно-ползунный механизм с полым валом является статически уравновешенным механизмом.
Но данный механизм имеет моментную неуравновешенность, которая характеризуется главным моментом сил инерции всех звеньев механизма.
Основное влияние на величину главного момента сил инерции механизма оказывают силы инерции шатунов. Это обусловлено следующим. При вращении кривошипа шатуны остаются параллельными друг другу, ускорения центров масс шатунов равны по модулю, но противоположны по направлению. Силы инерции каждого шатуна приводятся к главному вектору и главному моменту, которые приложены в центре масс шатуна (главный вектор сил инерции шатуна равен произведению его массы на ускорение центра масс; главный момент равен производной по времени от кинетического момента, вычисленного относительно центра масс шатуна). Главные векторы сил инерции двух идентичных шатунов механизма образуют пару сил, момент которой имеет переменные составляющие в проекциях главного момента сил инерции всего механизма на три взаимно-перпендикулярные неподвижные оси координат. В эти проекции входят составляющие и от главных моментов сил инерции шатунов. Кроме того, в одну из указанных проекций, а именно в проекцию на ось, параллельную оси вращения кривошипа, входят переменные составляющие от сил инерции кривошипа при его неравномерном вращении.
Таким образом, главный момент сил инерции кривошипно-ползунного механизма с полным валом, характеризующий его моментную неуравновешенность, имеет переменные проекции на три взаимно перпендикулярные неподвижные оси координат. Эти проекции имеют сложную алгебраическую структуру.
Наличие указанной моментной неуравновешенности является недостатком данного механизма. Неуравновешенные моменты сил инерции передаются от механизма на неподвижное основание машины, вызывая поворотные вибрации машинного агрегата в трех взаимно перпендикулярных плоскостях.
В основу изобретения положена задача создать оппозитный кривошипно-ползунный механизм без избыточных связей, у которого статическая и моментная неуравновешенности полностью исключаются за счет установки одного уравновешивающего звена и подбора соответствующих параметров геометрии масс звеньев.
В известном уровне техники отсутствуют механизмы, у которых подобная моментная неуравновешенность устраняется установкой одного уравновешивающего звена.
Решение этой задачи позволит полностью исключить вибрации, передающиеся на фундамент машины от сил инерции звеньев оппозитного кривошипно-ползунного механизма.
Поставленная задача решается тем, что в известный оппозитный кривошипно-ползунный механизм, содержащий стойку с прямолинейной направляющей, установленные в направляющей два идентичных ползуна, двуплечий кривошип в виде полого вала с фиксированной на стойке осью вращения, два идентичных шатуна, каждый из которых шарнирно соединен с соответствующим ползуном и плечом кривошипа, при этом продольная ось направляющей ползунов пересекает ось вращения кривошипа под острым углом в центральной точке кривошипа, а шарниры, связывающие концы шатунов с соответствующими плечами кривошипа, выполнены сферическими и установлены на внутренней поверхности полого вала в диаметрально противоположных точках, дополнительно введено уравновешивающее звено с фиксированной на стойке осью вращения, параллельной оси вращения кривошипа, контактирующее с внешней поверхностью полого вала кривошипа, при этом угловая скорость уравновешивающего звена пропорциональна по величине и противоположна по направлению угловой скорости кривошипа, а параметры геометрии масс звеньев механизма определены зависимостями:
Sxy1 = Sxz1 = Syz1 = Sxy2 = Sxz2 = Sxy3 = Sxz3 = Syz3 = 0; (1)
Ixy1 = Ixz1 = Ixy2 = Ixz2 = Iyz2 = Ixy3 = Ixz3 = 0; (2)
Ix2 = 0; Iy2 = Iz2 = l•Syz2;
Ix1 + 2r2(m2 - l-1•Syz2) - kIx3 = 0, (3)
где Sxyi, Sxzi, Syzi - статические моменты массы i-го звена относительно плоскостей декартовой системы координат (Axyz)i, связанной с i-м звеном; i - номер звена: 1 - кривошип, 2 - шатун, 3 - уравновешивающее звено; Ai - полюс звена: A1 и A3 - центральные точки соответственно кривошипа и уравновешивающего звена, A2 - центр шарнира, соединяющего шатун с кривошипом; оси A1x1 и A3x3 совпадают с осями вращения соответственно кривошипа и уравновешивающего звена, ось A2x2 совпадает с продольной осью шатуна; Ixi, Iyi, Izi, Ixyi, Ixzi, Iyzi - осевые и центробежные моменты инерции массы i-го звена в системе координат (Axyz)i; m2 - масса шатуна, r - длина плеча кривошипа, l - длина шатуна, k - отношение угловой скорости уравновешивающего звена к угловой скорости кривошипа.
На чертеже изображена схема оппозитного кривошипно-ползунного механизма в декартовой системе координат A1xyz.
Оппозитный кривошипно-ползунный механизм содержит стойку 1 с прямолинейной направляющей 2, двуплечий кривошип 3 с фиксированной на стойке осью вращения 4, установленные в направляющей 2 два идентичных ползуна 5 и 6, два идентичных шатуна 7 и 8, уравновешивающее звено 9 с фиксированной относительно стойки осью вращения 10. Двуплечий кривошип 3 выполнен в виде полого вала (на фигуре передняя часть полого вала не показана). Центральная точка кривошипа 3 совпадает с точкой пересечения оси 4 и продольной оси направляющей 2. Кривошип 3, ползуны 5 и 6, шатуны 7 и 8 соединены между собой шарнирами 11, 12, 13, 14, причем шарниры 11 и 12 установлены на внутренней поверхности полого вала (кривошипа 3) в диаметрально противоположных точках. Уравновешивающее звено 9 контактирует без проскальзывания с внешней поверхностью полого вала 3, подвижное соединение этих звеньев - высшая кинематическая пара. Ось вращения кривошипа 4 совпадает с осью A1x декартовой системы координат A1xyz, связанной со стойкой 1. Ось 10 вращения уравновешивающего звена 9 параллельна оси вращения кривошипа, центральная точка A3 уравновешивающего звена совпадает с точкой пересечения оси 10 с плоскостью A1yz. Продольная ось направляющей 2 расположена в плоскости A1xy. Окружность, описываемая шарнирами 11 и 12, находится в плоскости A1yz. Продольная ось направляющей 2 пересекает ось вращения кривошипа 4 под острым углом α.
Параметры геометрии масс механизма определяются следующими зависимостями:
Sxy1 = Sxz1 = Syz1 = Sxy2 = Sxz2 = Sxy3 = Sxz3 = Syz3 = 0; (1)
Ixy1 = Ixz1 = Ixy2 = Ixz2 = Iyz2 = Ixy3 = Ixz3 = 0; (2)
Ix2 = 0; Iy2 = Iz2 = l•Syz2;
Ix1 + 2r2(m2 - l-1•Syz2) - kIx3 = 0, (3)
где Sxyi, Sxzi, Syzi - статические моменты массы i-го звена относительно плоскостей декартовой системы координат (Axyz)i, связанной с i-м звеном; i - номер звена: 1 - кривошип, 2 - шатун, 3 - уравновешивающее звено; Ai - полюс звена: A1 и A3 - центральные точки соответственно кривошипа и уравновешивающего звена, A2 - центр шарнира, соединяющего шатун с кривошипом; оси A1x1 и A3x3 совпадают с осями вращения соответственно кривошипа и уравновешивающего звена, ось A2x2 совпадает с продольной осью шатуна; Ixi, Iyi, Izi, Ixyi, Ixzi, Iyzi - осевые и центробежные моменты инерции массы i-го звена в системе координат (Axyz)i; m2 - масса шатуна, r - длина плеча кривошипа, l - длина шатуна, k - отношение угловой скорости уравновешивающего звена к угловой скорости кривошипа.
Параметры геометрии масс, не включенные в зависимости (1), (2), (3), назначаются из конструктивных соображений.
Оппозитный кривошипно-ползунный механизм работает следующим образом. При поворачивании кривошипа 3 вокруг оси 4 шарниры 11 и 12 перемещаются по окружности, лежащей в плоскости A1yz. Ползуны 5 и 6 передвигаются по направляющей 2, а уравновешивающее звено 9 поворачивается вокруг оси 10. За полный оборот кривошипа 3 ползуны 5 и 6 сделают по направляющей 2 прямой и обратный ход, звено 9 сделает k оборотов вокруг оси 10. При непрерывном вращении кривошипа 3 ползуны 5 и 6 будут совершать возвратно-поступательное движение вдоль направляющей 2 во взаимно противоположных направлениях, а звено 9 будет вращаться вокруг оси 10 в направлении, противоположном вращению кривошипа.
Выполнение зависимостей (1), идентичность шатунов, идентичность ползунов и геометрическая симметрия оппозитного кривошипно-ползунного механизма относительно центра A1, обеспечивают перевод общего центра масс его звеньев в неподвижную точку, расположенную на отрезке A1A3. В связи с этим главный вектор всех сил инерции механизма равен нулю при любом положении механизма, то есть механизм является статически уравновешенным.
Для доказательства условия равенства нулю главного момента сил инерции механизма заменим совокупность сил инерции всех точек каждого шатуна силами инерции двух замещающих точек. Из зависимостей (1) и (2), относящихся к шатуну, следует, что каждый шатун можно считать прямолинейным тонким стержнем. Условия динамического размещения массы звена для такой модели шатуна будут выполнены, если первую замещающую точку с массой l-1•Syz2 поместить в центре шарнира, соединяющего шатун с ползуном, а вторую точку с массой (m2 - l-1•Syz2) - в центре шарнира, соединяющего шатун с кривошипом. После такого размещения масс каждого шатуна определение главного момента сил инерции механизма можно производить при следующих предположениях: шатуны не имеют массы, масса каждого ползуна увеличена на величину массы первой замещающей точки, масса кривошипа увеличена на удвоенную массу второй замещающей точки, при этом центр масс кривошипа находится по-прежнему в центральной точке, а момент инерции кривошипа относительно оси вращения равен
Ix1 + 2r2(m2 - l-1•Syz2).
Силы инерции ползунов остаются взаимно-уравновешенными и после добавления масс замещающих точек. Поэтому величину главного момента сил инерции механизма будут определять только силы инерции уравновешивающего звена 9 и кривошипа 3 с увеличенной инерционностью. Проекции главного момента сил инерции механизма на оси неподвижной системы координат A1xyz выражаются формулами
M
где ε1 и ε3 - угловые ускорения соответственно кривошипа и уравновешивающего звена; остальные величины в этих формулах взяты без изменения из (3).
Учитывая зависимость (3), а также зависимость между угловыми ускорениями уравновешивающего звена и кривошипа (ε3 = -kε1) получим M
Таким образом, оппозитный кривошипно-ползунный механизм, параметры геометрии масс которого удовлетворяют зависимостям (1), (2), (3), является полностью уравновешенным. Силы инерции звеньев этого механизма взаимно компенсируются. Механизм исключается из числа источников вибраций, передающихся на фундамент машины.
Использование заявляемого решения позволяет уменьшить виброактивность машинного агрегата, улучшить условия работы обслуживающего персонала, повысить производительность труда.
Источники информации
1. Видякин Ю. А. , Добросклонский Е. Б., Кондратьева Т.Ф. Оппозитные компрессоры. - Л.: Машиностроение (Ленинград. отделение), 1979, с. 279.
2. Патент РФ N 2085791, 6 F 16 H 21/16, 1997.
3. Артоболевский И.И. Теория механизмов. - М.: Наука, 1965, с. 776.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОППОЗИТНЫЙ КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ | 1998 |
|
RU2149298C1 |
| ОППОЗИТНЫЙ КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ | 1995 |
|
RU2085791C1 |
| ШАРНИРНЫЙ ЧЕТЫРЕХЗВЕННИК | 1994 |
|
RU2087779C1 |
| Дезаксиальный кривошипно-ползунный механизм | 1989 |
|
SU1747775A1 |
| ДВУХОСНАЯ ЛОКОМОТИВНАЯ ТЕЛЕЖКА С РАДИАЛЬНОЙ УСТАНОВКОЙ КОЛЕСНЫХ ПАР | 2005 |
|
RU2291079C1 |
| СДВОЕННЫЙ ПОЛЗУННО-КОРОМЫСЛОВЫЙ МЕХАНИЗМ | 1991 |
|
RU2051303C1 |
| КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ | 1996 |
|
RU2110718C1 |
| ПОРШНЕВАЯ РЕЗОНАНСНАЯ МАШИНА | 2004 |
|
RU2274755C1 |
| ШЕСТИЗВЕННЫЙ ШАРНИРНЫЙ МЕХАНИЗМ | 2007 |
|
RU2338104C1 |
| РЕЗОНАНСНАЯ ЛЕСОПИЛЬНАЯ РАМА | 1994 |
|
RU2084332C1 |
Изобретение относится к уравновешиванию машин на фундаменте и может быть использовано для исключения вибраций, передающихся на фундамент от звеньев оппозитного кривошипно-ползунного механизма, входящего в состав машинного агрегата. Изобретение позволит добиться того, что главный момент сил инерции оппозитного кривошипно-ползунного механизма будет равен нулю при любом законе движения кривошипа, обеспечив тем самым выполнение условия моментной уравновешенности механизма. Оппозитный кривошипно-ползунный механизм содержит стойку с прямолинейной направляющей, установленные в направляющей два идентичных ползуна, двуплечий кривошип в виде полого вала с фиксированной на стойке осью вращения, два идентичных шатуна, каждый из которых шарнирно соединен с соответствующим ползуном и плечом кривошипа. Продольная ось направляющей ползунов пересекает ось вращения кривошипа под острым углом в центральной точке кривошипа. Шарниры, связывающие концы шатунов с соответствующими плечами кривошипа, выполнены сферическими и установлены на внутренней поверхности полого вала в диаметрально противоположных точках. С внешней поверхностью полого вала кривошипа контактирует уравновешивающее звено с фиксированной на стойке осью вращения, параллельной оси вращения кривошипа. Угловая скорость уравновешивающего звена пропорциональна по величине и противоположна на направлению угловой скорости кривошипа. Параметры геометрии масс звеньев механизма определены по зависимостям. Технический результат позволит уменьшить виброактивность машинного агрегата, улучшить условия работы обслуживающего персонала, повысить производительность труда. 1 ил.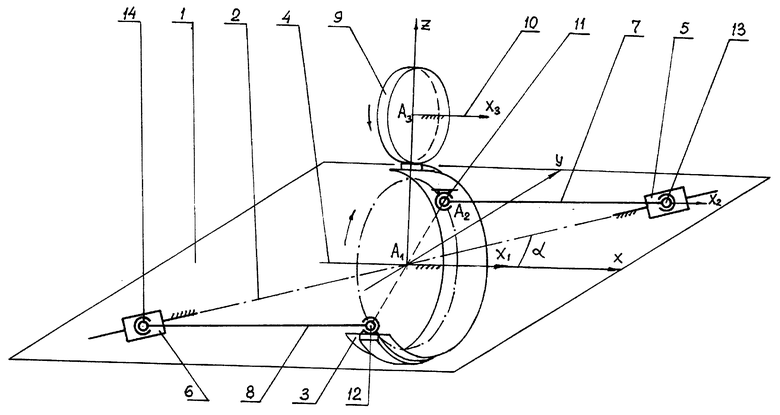
Оппозитный кривошипно-ползунный механизм, содержащий стойку с направляющей, установленные в направляющей два идентичных ползуна, двуплечий кривошип в виде полого вала с фиксированной на стойке осью вращения, два идентичных шатуна, каждый из которых шарнирно соединен с соответствующим ползуном и плечом кривошипа, при этом продольная ось направляющей ползунов пересекает ось вращения кривошипа под острым углом в центральной точке кривошипа, а шарниры, связывающие концы шатунов с соответствующими плечами кривошипа, выполнены сферическими и установлены на внутренней поверхности полого вала в диаметрально противоположных точках, отличающийся тем, что с внешней поверхностью полого вала кривошипа контактирует уравновешивающее звено с фиксированной на стойке осью вращения, параллельной оси вращения кривошипа, при этом угловая скорость уравновешивающего звена пропорциональна по величине и противоположна по направлению угловой скорости кривошипа, а параметры геометрии масс звеньев механизма определены зависимостями:
Sxy1 = Sxz1 = Syz1 = Sxy2 = Sxz2 = Sxy3 = Sxz3 = Syz3 = 0; (1)
Jxy1 = Jxz1 = Jxy2 = Jxz2 = Jyz2 = Jxy3 = Jxz3 = 0; (2)
Jx2 = 0; Jy2 = Jz2 = l • Syz2;
Jx1 + 2r2 (m2 - l-1 • Syz2) - k • Jx3 = 0, (3)
где Sxyi, Sxzi, Syzi - статические моменты массы i-го звена относительно плоскостей декартовой системы координат (Axyz)i, связанной с i-м звеном;
i - номер звена: 1 - кривошип, 2 - шатун, 3 - уравновешивающее звено;
Ai - полюс звена: A1 и A3 - центральные точки соответственно кривошипа и уравновешивающего звена, A2 - центр шарнира, соединяющего шатун с кривошипом; оси A1x1 и A3x3 совпадают с осями вращения соответственно кривошипа и уравновешивающего звена, ось A2x2 совпадает с продольной осью шатуна;
Jxi, Jyi, Jzi, Jxyi, Jxzi, Jyzi - осевые и центробежные моменты инерции массы i-го звена в системе координат (Axyz)i;
m2 - масса шатуна;
r - длина плеча кривошипа;
l - длина шатуна;
k - отношение угловой скорости уравновешивающего звена к угловой скорости кривошипа.
| ОППОЗИТНЫЙ КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ | 1995 |
|
RU2085791C1 |
| Двигатель внутреннего горения с противоположно движущимися поршнями | 1929 |
|
SU19397A1 |
| Механизм для преобразования возвратно-поступательного движения во вращательное | 1988 |
|
SU1633208A1 |
| DE 1526464 A, 14.12.1972 | |||
| Устройство для программного управления группой технологических объектов | 1974 |
|
SU506002A1 |
| СПОСОБ СТОПОРЕНИЯ РЕЗЬБОВОГО СОЕДИНЕНИЯ ДЕТАЛЕЙ ИЗ УГЛЕРОДНЫХ МАТЕРИАЛОВ | 2015 |
|
RU2608711C1 |
| Артоболевский И.И | |||
| Курс теории механизмов и машин | |||
| - М.: ОГИЗ, Гостехиздат, 1945, с.272 - 288, 357 - 385 | |||
| Крайнев А.Ф | |||
| Словарь-справочник по механизмам | |||
| - М.: Машиностроение, 1981, с.148. | |||

