Изобретение относится к балансировочной технике и может быть использовано для балансировки гироскопов, в частности динамически настраиваемых гироскопов.
Цель изобретения - повышение точности, универсальности и производительности балансировки гироскопов в условиях расширенной номенклатуры их типов и конструктивных особенностей. Это достигается реализацией технических решений, позволяющих максимально учитывать конструктивные особенности гироскопов.
Конструктивные особенности, которые необходимо учитывать при смене типов гироскопов, подлежащих балансировке, можно классифицировать следующим образом.
1. Радиусы трех плоскостей коррекции роторов.
2. Габаритные размеры.
3. Расстояния между плоскостями коррекции.
4. Расстояние средней плоскости коррекции от базовой (посадочной) поверхности корпуса гироскопа.
5. Резонансная частота вращения.
6. Температура термостабилизации.
В настоящее время известно устройство для автоматической балансировки гироскопов, содержащее основание, закрепленные на нем вибратор с вибростолом и корректирующий лазер, снабженный фокусирующим объективом, приспособление для крепления гироскопа и вакуумный колпак, закрепленные на вибростоле, подпружиненный подвижный фиксатор, установленный на основании и взаимодействующий с вибростолом, систему защиты, выполненную в виде последовательно соединенных пневматически пневмомагистрали, электропневмоклапана, сопла и блока отсоса, и систему управления, выполненную в виде соединенных последовательно датчика опорного сигнала, формирователя и фазовращателя, связанного со входом вибратора, двух каналов электрической пружины, каждый из которых содержит соединенные последовательно датчик угла, усилитель-демодулятор и датчик момента, блок тест - контроля, снабженный источником питания гироскопа и связанный входами с датчиком угла первого канала электрической пружины; фазовращателя, управляющей электронной вычислительной машины (ЭВМ), входы которой соединены с выходами блока тест - контроля и усилителей-демодуляторов и блока управления, выход которого соединен со входом лазера [1].
Недостатком данного устройства является снижение точности и производительности балансировки, вызванные возможностью поражения повторных участков поверхности ротора, а также необходимостью ручных операций смены положения оси гироскопа при определении параметров дисбалансов и их коррекции.
Наиболее близким по технической сущности к предлагаемому изобретению является устройство для автоматической балансировки гироскопов, содержащее основание, закрепленные на нем стол, установленные на последнем виброкамеру, включающую в себя: вибратор, корпус с герметичным откидным защитным кожухом, систему сдува, связанный с ней пневматически электропневмоклапан, приспособление для установки и закрепления гироскопа, содержащего датчики угла и момента, снабженное датчиком опорного сигнала с ротора, и арретир для фиксации осевого перемещения гироскопа внутри виброкамеры, привод осевого вращения гироскопа, связанный с приспособлением датчик вибрации, установленный на приспособлении; систему создания рабочей среды, связанную с корпусом, лазер с фокусирующим объективом и системой управления, пульт управления, объединяющий два канала "электрической пружины" по осям чувствительности X и Y, каждый из которых состоит из последовательно соединенных усилителя-демодулятора, подключенного к выходу соответствующего датчика угла, и токового усилителя, связанного выходом с входом соответствующего датчика момента, блок формирования напряжений питания привода гироскопа и усилитель-формирователь сигнала с датчика опорного сигнала с ротора, канал измерения величины и угла моментного дисбаланса, содержащий преобразователь эффективного напряжения в постоянный ток, канал формирования синусоидального сигнала вибрации, содержащий усилитель мощности, выход которого подключен к входу вибратора, и управляющую ЭВМ, содержащую следующие интерфейсы: аналого-цифровой преобразователь, блок входных регистров и блок выходных регистров, входы и выходы которых соединены с пультом управления, каналами измерения величины и угла моментного дисбаланса и формирования синусоидального сигнала вибрации, а именно, входы аналого-цифрового преобразователя соответственно соединены: первый и второй - с выходами усилителей мощности каналов "электрической пружины", третий - с выходом датчика вибрации, а четвертый - с выходом преобразователя эффективного напряжения в постоянный ток, выходы блока выходных регистров соединены соответственно: первый - с электропневмоклапаном, второй - с входом системы создания среды, третий - с входом арретира, четвертый - с входом управления привода осевого вращения гироскопа, пятый - с входом пульта управления, шестой - с входом управления усилителя мощности, а седьмой - с системой управления лазера [2].
Недостатками данного устройства является следующее:
- обязательное направление оси вращения гироскопа на Полярную звезду, что диктует дополнительные требования при размещении установки в производственном помещении, а также усложняет технологию измерения осевого дисбаланса (поворот и измерение через 90o, а не через 180o);
- наличие фазовращателя для определения статического дисбаланса, что значительно снижает возможность автоматизированного управления процессом балансировки;
- нет адаптации к широкой номенклатуре типов гироскопов и их конструктивным особенностям (различные радиусы зон коррекции в плоскостях коррекции, несимметричное расположение плоскостей коррекции и т.д.).
Это вносит дополнительные сложности, связанные с необходимостью учитывать азимут направления оси вращения гироскопа и угол наклона оси вращения к горизонту при определении осевого дисбаланса, а также иметь завышенное значение виброускорения при измерении статического дисбаланса. Кроме этого, в первом и во втором примерах балансировка ведется в вакууме на рабочих оборотах, что при применяемых технологиях измерения дисбалансов не только не дает существенного преимущества в производительности, но и затрудняет предохранение гироскопа от продуктов эрозии.
К тому же, в указанных примерах нет описаний перехода от одного типа гироскопа к другому, что при большой номенклатуре гироскопов очень важно.
Поэтому в предлагаемом балансировочном устройстве делается упор на:
- повышенную адаптацию устройства к различным типам гироскопов;
- надежную защиту гироскопа от попадания в него продуктов эрозии.
Поставленная цель достигается тем, что устройство для автоматической балансировки роторов гироскопов, содержащее основание, закрепленные на нем стол, установленные на последнем виброкамеру, включающую в себя: вибратор, корпус с герметичным откидным защитным кожухом, систему сдува, связанный с ней пневматически электропневмоклапан, приспособление для установки и закрепления гироскопа, содержащего датчики угла и момента, снабженное датчиком опорного сигнала с ротора, и арретир для фиксации осевого перемещения гироскопа внутри виброкамеры, привод осевого вращения гироскопа, связанный с приспособлением датчик вибрации, установленный на приспособлении; систему создания рабочей среды, связанную с корпусом, лазер с фокусирующим объективом и системой управления, пульт управления, объединяющий два канала "электрической пружины" по осям чувствительности X и Y, каждый из которых состоит из последовательно соединенных усилителя-демодулятора, подключенного к выходу соответствующего датчика угла, и токового усилителя, связанного выходом с входом соответствующего датчика момента, блок формирования напряжений питания привода гироскопа и усилитель-формирователь сигнала с датчика опорного сигнала с ротора, канал измерения величины и угла моментного дисбаланса, содержащий преобразователь эффективного напряжения в постоянный ток, канал формирования синусоидального сигнала вибрации, содержащий усилитель мощности, выход которого подключен к входу вибратора, и управляющую ЭВМ, содержащую следующие интерфейсы: аналого-цифровой преобразователь, блок входных регистров и блок выходных регистров, входы и выходы которых соединены с пультом управления, каналами измерения величины и угла моментного дисбаланса и формирования синусоидального сигнала вибрации, а именно, входы аналого-цифрового преобразователя соответственно соединены: первый и второй - с выходами усилителей мощности каналов "электрической пружины", третий - с выходом датчика вибрации, а четвертый - с выходом преобразователя эффективного напряжения в постоянный ток, выходы блока выходных регистров соединены соответственно: первый - с электропневмоклапаном, второй - с входом системы создания среды, третий - с входом арретира, четвертый - с входом управления привода осевого вращения гироскопа, пятый - с входом пульта управления, шестой - с входом управления усилителя мощности, а седьмой - с системой управления лазера, снабженной манипулятором перемещения лазера для совмещения фокуса его объектива с плоскостями коррекции (I, II, III) ротора балансируемого гироскопа, который содержит корпус с горизонтальными упорами, установленную внутри него с возможностью вертикального перемещения первую подвижную платформу, первый линейный пневмопривод перемещения первой подвижной платформы, установленную на последней съемную механическую кассету с тремя вертикальными профилями разной высоты, связанный с механической кассетой и неподвижно закрепленный на первой подвижной платформе трехпозиционный пневмопривод горизонтального перемещения механической кассеты, установленную на горизонтальных упорах в корпусе с возможностью вертикального перемещения вторую подвижную платформу с закрепленным в ее нижней части упором, взаимодействующим при подъеме механической кассеты с одним из вертикальных профилей, установленную на второй подвижной платформе с возможностью горизонтального перемещения в рабочей зоне третью подвижную платформу, содержащую первый поворотный барабан с регулируемыми упорами, второй линейный пневмопривод, предназначенный для перемещения третьей подвижной платформы от стенки корпуса до установленного в рабочей зоне регулируемого упора первого поворотного барабана и неподвижно закрепленный на второй подвижной платформе, установленную на третьей подвижной платформе с возможностью горизонтального перемещения четвертую подвижную платформу, содержащую второй и третий поворотные барабаны с регулируемыми упорами, на которой неподвижно закреплен лазер с объективом, и третий линейный пневмопривод, предназначенный для перемещения четвертой подвижной платформы между установленными в рабочей зоне регулируемыми упорами второго и третьего поворотных барабанов и неподвижно закрепленный на третьей подвижной платформе; связанных механически четвертым линейным пневмоприводом, внешним кольцом, закрепленным на столе горизонтально, и термостатом для поддержания необходимой температуры, закрепленным в корпусе, виброкамера является внутренним кольцом образованного с внешним кольцом подшипника скольжения и связана с валом привода осевого вращения гироскопа, обеспечивающего ее вращение вокруг горизонтальной оси в пределах угла 180o, вибратор соосно расположен в корпусе и имеет горизонтальную ось вибрации, передаваемой на приспособление для установки и закрепления гироскопа, канал измерения величины и угла моментного дисбаланса выполнен в виде подключенного к выходу датчика угла резистивного делителя, управляемого полосового фильтра с цифровым управлением, подключенных к его выходу компаратора перехода через ноль и фильтра нижних частот, выход которого связан с преобразователем эффективного напряжения в постоянный ток, первого регистра, связанного с входами управления полосового фильтра, для работы которого также формируется опорное напряжение частотой, в 100 раз большей частоты вращения гироскопа, создаваемое контуром автоматической подстройки частоты, состоящим из управляемого напряжением генератора импульсов, делителя частоты в 1000 раз и первого фазового детектора, на второй вход которого поступает сигнал с выхода усилителя-формирователя, второго фильтра нижних частот и первого интегратора, связанного с управляющим входом генератора импульсов, делителя частоты в 10 раз, подключенного к выходу последнего и связанного с опорным входом полосового фильтра, счетчика импульсов, подключенного к выходам усилителя-формирователя, компаратора перехода через ноль и генератора импульсов, и второго регистра, связанного с параллельными выходами счетчика импульсов, канал формирования синусоидального сигнала вибрации выполнен в виде второго контура автоматической подстройки частоты, состоящего из последовательно соединенных управляемого напряжением генератора гармонических колебаний, второго фазового детектора, на второй вход которого поступает сигнал с выхода усилителя-формирователя, третьего фильтра нижних частот и второго интегратора, связанного с управляющим входом генератора гармонических колебаний и подключенного к выходу последнего управляемого усилителя с регулируемым коэффициентом усиления, последовательно соединенного с усилителем мощности, а выходы блока выходных регистров соединены соответственно: восьмой и девятый - с входами управления второго и третьего приводов, десятый - одиннадцатый с пневмоприводом, двенадцатый - с входом управления первого линейного пневмопривода, тринадцатый - с входом термостата, четырнадцатый - с входом записи первого регистра, пятнадцатый - двадцать второй - с информационными входами первого регистра, двадцать третий - с входом записи второго регистра, двадцать четвертый - тридцать девятый - с входами переключения коэффициента передачи управляемого усилителя.
Устройство отличается также тем, что система сдува выполнена в виде единого откидного кожуха с прозрачной торцевой поверхностью, закрепленного на столе между ротором и фокусирующим объективом, содержит индикаторный лимб, нанесенный на прозрачную торцевую поверхность кожуха и расположенный соосно ротору, канал сдува продуктов эрозии, содержащий воздухораспределитель, подключенный к электропневмоклапану, сопло, разделенное на три зоны, направляющее сжатый воздух на соответствующую плоскость коррекции и состоящее из стеклянной пластины для прохода луча, металлического корпуса и снизу защитного элемента в виде ленты из тонкой вакуумной резины, закрывающей в рабочем положении ротор гироскопа и другие его уязвимые части от попадания продуктов эрозии, снабженной прорезью для доступа лазерного луча к поверхности ротора гироскопа, ловушки в виде короба и лабиринтного отражателя продуктов эрозии.
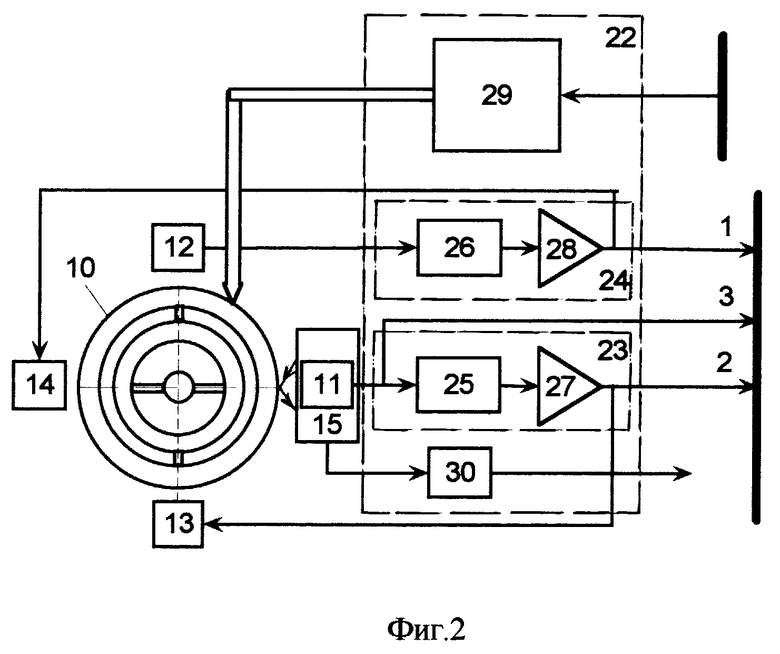
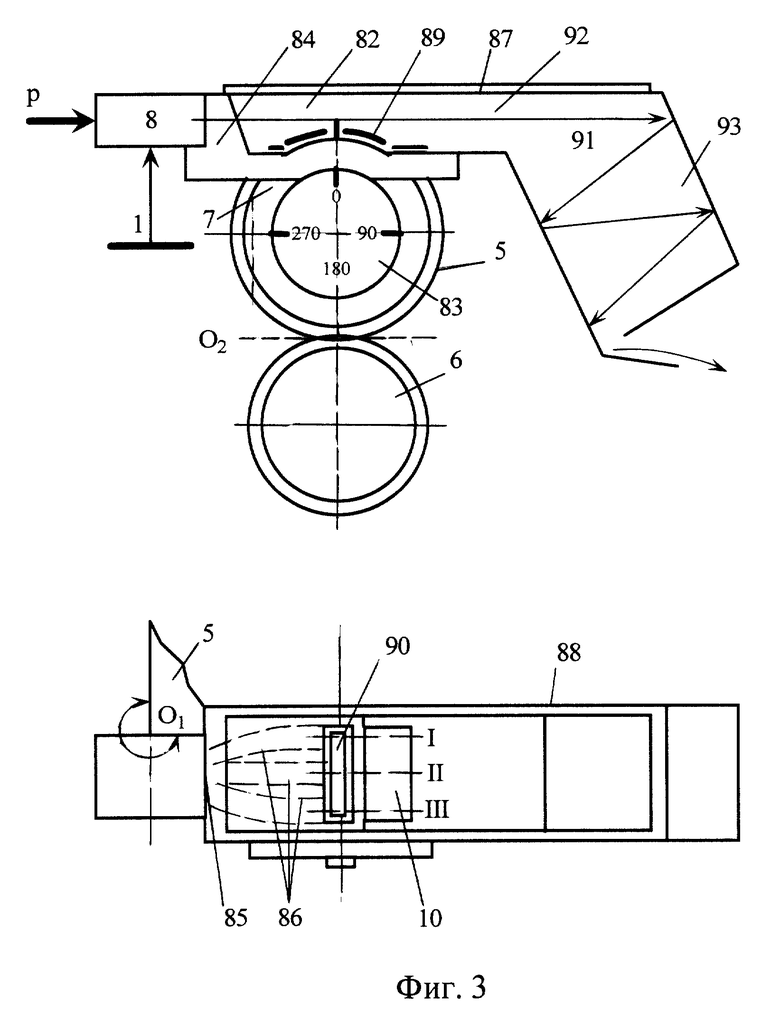
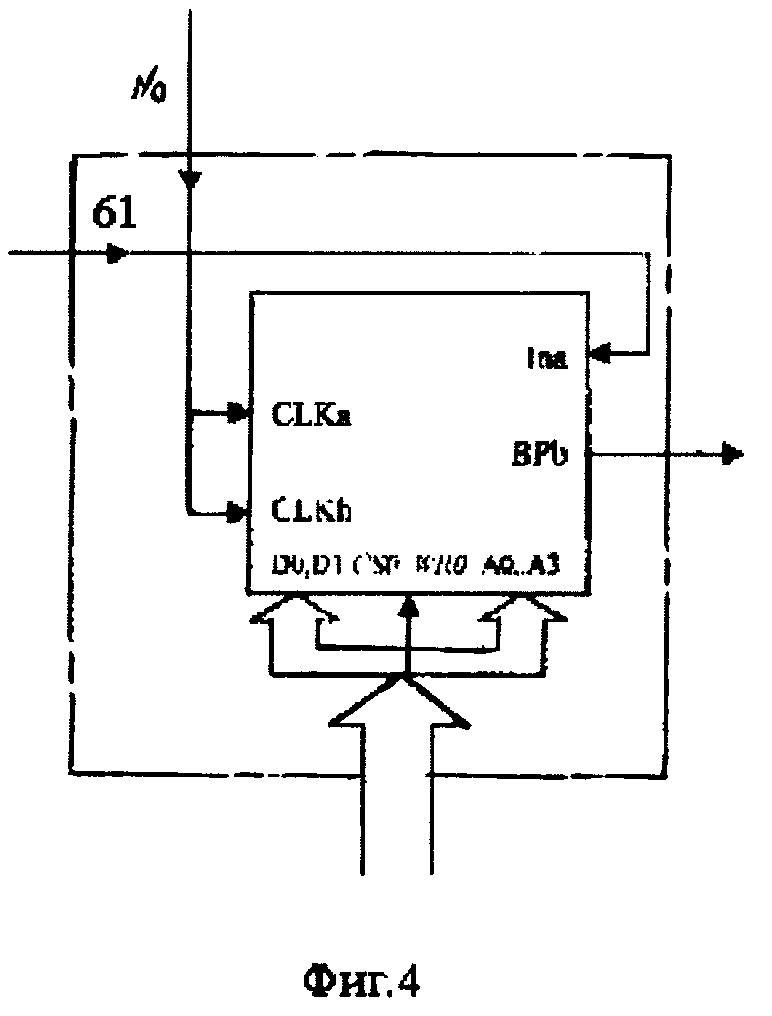
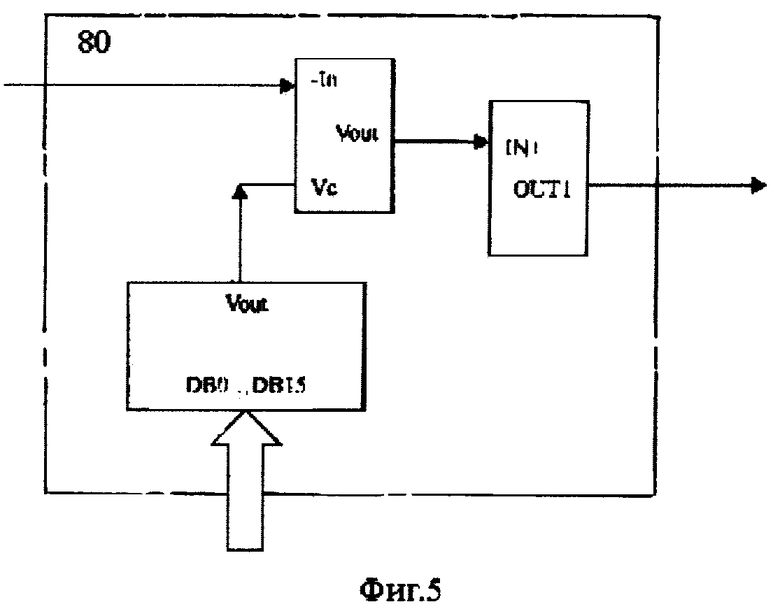
На фиг. 1 и 2 приведена структурная схема устройства; на фиг. 3 - система сдува, а на фиг. 4 и 5 - примеры реализации управляемого полосового фильтра с цифровым управлением и усилителя с регулируемым коэффициентом усиления.
Устройство для автоматической балансировки роторов гироскопов содержит основание 1, закрепленные на нем стол 2, установленные на последнем виброкамеру 3, включающую в себя: вибратор 4, корпус 5 с герметичным откидным защитным кожухом 6, систему 7 сдува, связанный с ней пневматически электропневмоклапан 8, приспособление 9 для установки и закрепления гироскопа 10, содержащего датчики 11 и 12 угла и датчики 13 и 14 момента, снабженное датчиком 15 опорного сигнала с ротора гироскопа 10, и арретир 16 для фиксации осевого перемещения гироскопа 10 внутри виброкамеры 3, датчик 17 вибрации, установленный на приспособлении 9; систему 18 создания рабочей среды, связанную с корпусом 5, лазер 19 с фокусирующим объективом 20, подключенную к лазеру 19 систему 21 управления, пульт 22 управления, объединяющий два канала 23 и 24 "электрической пружины" по осям чувствительности Х и Y, каждый из которых состоит из последовательно соединенных усилителя-демодулятора 25 (26), подключенного к выходу соответствующего датчика 11 (12) угла, и усилителя мощности 27 (28), связанного выходом с входом соответствующего датчика 13 (14) момента, блок 29 формирования напряжений питания привода гироскопа и усилитель-формирователь 30 сигнала с датчика опорного сигнала с ротора, канал 31 измерения величины и угла моментного дисбаланса, канал 32 формирования синусоидального сигнала вибрации и управляющую ЭВМ 33, содержащую следующие интерфейсы 34-36: аналого-цифровой преобразователь 34, блок 35 входных регистров и блок 36 выходных регистров, входы и выходы которых соединены с пультом 22 управления, каналами 31 и 32 измерения величины и угла моментного дисбаланса и формирования синусоидального сигнала вибрации, отличающееся тем, что устройство снабжено манипулятором 37 перемещения лазера 19 для совмещения фокуса его объектива 20 с плоскостями коррекции (I, II, III) ротора гироскопа 10, который содержит корпус 38 с горизонтальными упорами 39, установленную внутри корпуса 38 с возможностью вертикального перемещения первую подвижную платформу 40, первый линейный пневмопривод 41 перемещения первой подвижной платформы 40, установленную на последней механическую кассету 42 с тремя вертикальными профилями 43-45 разной высоты, связанный с механической кассетой 42 и неподвижно закрепленный на первой подвижной платформе 40 трехпозиционный пневмопривод 46 горизонтального перемещения механической кассеты 42 в плоскости чертежа, установленную на горизонтальных упорах 39 в корпусе 38 с возможностью вертикального перемещения вторую подвижную платформу 47 с закрепленным в ее нижней части упором 48, взаимодействующим при подъеме механической кассеты 42 с одним из вертикальных профилей 43, 44 или 45, установленную на второй подвижной платформе 47 с возможностью горизонтального перемещения в рабочей зоне третью подвижную платформу 49, содержащую первый поворотный барабан 50 с регулируемыми упорами, второй линейный пневмопривод 51, предназначенный для перемещения третьей подвижной платформы 49 от стенки корпуса 38 до установленного в рабочей зоне регулируемого упора первого поворотного барабана 50 и неподвижно закрепленный на второй подвижной платформе 47, установленную на третьей подвижной платформе 49 с возможностью горизонтального перемещения в плоскости чертежа четвертую подвижную платформу 52, содержащую второй и третий поворотные барабаны 53 и 54 с регулируемыми упорами, на которой неподвижно закреплен лазер 19 с фокусирующим объективом 20, и третий линейный пневмопривод 55, предназначенный для перемещения четвертой подвижной платформы 52 между установленными в рабочей зоне регулируемыми упорами второго и третьего поворотных барабанов 53 и 54 и неподвижно закрепленный на третьей подвижной платформе 49; связанными механически приводом осевого вращения гироскопа, выполненного виде четвертого линейного пневмопривода 56 и преобразователя 57 линейного перемещения во вращение, и внешним кольцом 58, закрепленным на столе горизонтально, и термостатом 59 для поддержания необходимой температуры, закрепленным в корпусе, виброкамера 3 является внутренним кольцом образованного с внешним кольцом подшипника скольжения и связана с валом преобразователя 57 линейного перемещения во вращение, обеспечивающего ее вращение вокруг горизонтальной оси в пределах угла 180o, вибратор 4 соосно расположен в корпусе 3 и имеет горизонтальную ось вибрации, передаваемой на приспособление 9 для установки и закрепления гироскопа 10; канал 31 измерения величины и угла моментного дисбаланса выполнен в виде подключенного к выходу датчика 11 угла резистивного делителя 60, управляемого полосового фильтра 61 с цифровым управлением, подключенных к его выходу компаратора 62 перехода через ноль и фильтра 63 нижних частот, выход которого связан с преобразователем 64 эффективного напряжения в постоянный ток, первого регистра 65, связанного с входами управления полосового фильтра 61, для работы которого также формируется опорное напряжение частотой, в 100 раз большей частоты вращения гироскопа 10, создаваемое контуром 66 автоматической подстройки частоты, состоящим из управляемого напряжением генератора 67 импульсов, делителя 68 частоты в 1000 раз, первого фазового детектора 69, на второй вход которого поступает сигнал с выхода усилителя-формирователя 30, второго фильтра 70 нижних частот и первого интегратора 71, связанного с управляющим входом генератора 67 импульсов, делителя 72 частоты в 10 раз, подключенного к выходу последнего и связанного с опорным входом полосового фильтра 61, счетчика 73 импульсов, подключенного к выходам усилителя-формирователя 30, компаратора 62 перехода через ноль и генератора 67 импульсов, и второго регистра 74, связанного с параллельными выходами счетчика импульсов 73, канал 32 формирования синусоидального сигнала вибрации выполнен в виде второго контура 75 автоматической подстройки частоты, состоящего из последовательно соединенных управляемого напряжением генератора 76 гармонических колебаний, второго фазового детектора 77, на второй вход которого поступает сигнал с выхода усилителя-формирователя 30, третьего фильтра 78 нижних частот и второго интегратора 79, связанного с управляющим входом генератора 76 гармонических колебаний, подключенного к выходу последнего управляемого усилителя 80 с регулируемым коэффициентом усиления и последовательно соединенного с ним усилителя 81 мощности, выход которого подключен к входу вибратора 4.
Входы аналого-цифрового преобразователя 34 соответственно соединены: первый и второй - с выходами первого и второго усилителей мощности 27 и 28, третий - с выходом датчика 59 вибрации, а четвертый - с выходом преобразователя 64 эффективного напряжения в постоянный ток, входы блока 35 входных регистров связаны с 1-9 выходами второго регистра 74, а выходы блока 36 выходных регистров соединены соответственно: первый - с входом электропневмоклапана 8, второй - с входом системы создания среды 18, третий - с входом арретира 16, четвертый - с управляющим входом привода 56, 57 осевого вращения гироскопа, пятый - с входом пульта 22 управления, шестой - с входом управления усилителя 81 мощности, седьмой - с системой 21 управления лазера 19, восьмой и девятый - с входами управления второго и третьего приводов 51 и 55, десятый и одиннадцатый - с пневмоприводом 46, двенадцатый - с входом управления первого линейного пневмопривода 41, тринадцатый - с входом термостата 59, четырнадцатый - с входом записи первого регистра 65, пятнадцатый - двадцать второй - с информационными входами первого регистра 65, двадцать третий - с входом записи второго регистра 74, двадцать четвертый - тридцать девятый - с входами переключения коэффициента передачи усилителя 80.
Устройство отличается также тем, что система 7 сдува выполнена в виде единого откидного кожуха 82 с прозрачной торцевой поверхностью, закрепленного на столе 2 между ротором гироскопа 10 и фокусирующим объективом 20, содержит индикаторный лимб 83, нанесенный на прозрачную торцевую поверхность кожуха 82 и расположенный соосно ротору, канал 84 сдува продуктов эрозии, содержащий воздухораспределитель 85, подключенный к электропневмоклапану 8, сопло 86, разделенное на три зоны, направляющее сжатый воздух на соответствующую плоскость коррекции ротора и состоящее из стеклянной пластины 87 для прохода луча, металлического корпуса 88 и снизу защитного элемента в виде ленты 89 из тонкой вакуумной резины, закрывающей в рабочем положении ротор гироскопа 10 и другие его уязвимые части от попадания продуктов эрозии, снабженной прорезью 90 для доступа лазерного луча к поверхности ротора гироскопа 10, ловушки 91 в виде короба 92 и лабиринтного отражателя 93 продуктов эрозии.
Рассмотрим возможную реализацию некоторых нестандартных элементов структуры предлагаемого устройства.
Управляемый полосовой фильтр 61 с цифровым управлением может быть выполнен, например, на микросхеме MAX260, фирмы MAXIM [3], фиг. 4.
Усилитель 80 с регулируемым коэффициентом усиления может быть выполнен, например, в виде структуры, фиг. 5, на микросхемах VCA610, фирмы BURR-BROWN, MAX412, фирмы MAXIM и аналого-цифрового преобразователя AD669, фирмы ANALOG DEVICE, фиг. 6 [3-5].
Усилитель 81 мощности может быть выполнен, например, в виде последовательно соединенных низкоомного прецизионного аналогового ключа MAX303, фирма MAXIM [6] и любого усилителя с выходной мощностью P = 100 Вт.
Воздушный трехпозиционный цилиндр 46, описанный в VI-VII томах труда И. И. Артоболевского "Механизмы в современной технике", предназначен для перемещения кассеты с размещением под хвостовиком 48 подвижной платформы 47 профилей кассеты 43, 44, 45, соответствующих радиусам плоскостей коррекции ротора: нижней средней и верхней.
Воздушный трехпозиционный цилиндр работает следующим образом.
По команде программы, соответствующей алгоритму работы устройства для автоматической балансировки роторов гироскопов, включаются электроклапаны, подающие сжатый воздух в одно из отверстий трехпозиционного воздушного цилиндра. При этом при подаче сжатого воздуха в среднее отверстие цилиндрической поверхности и сообщении с атмосферой отверстий крайнего цилиндрической поверхности и центрального торцевой поверхности шток цилиндра устанавливается в среднее положение и профиль 44 устанавливается под хвостовиком 48. Если подать воздух в центральное отверстие торцевой поверхности и сообщить с атмосферой отверстия среднее и крайнее цилиндрической поверхности, то оба внутренних поршня движутся влево и происходит выдвижение штока и профиль 45 устанавливается под хвостовиком 48. При подаче воздуха в крайнее отверстие цилиндрической поверхности и сообщении с атмосферой отверстий среднего цилиндрической поверхности и центрального торцевой поверхности оба внутренних поршня движутся вправо и происходит втягивание штока и профиль 43 устанавливается под хвостовиком 48.
Устройство работает следующим образом.
Перед балансировкой нового типа гироскопов 10 осуществляют настроечные операции для предлагаемого устройства.
На первой подвижной платформе 40 манипулятора 37 оператор вставляет механическую кассету 42 с тремя предварительно настроенными вертикальными профилями 43-45 разной высоты, соответствующими радиусам зон коррекции дисбалансов в плоскостях коррекции (I, II, III) для данного типа гироскопа 10, поворачивает барабаны 50, 53 и 54 так, чтобы их регулируемые упоры с соответствующим наименованием типа гироскопа расположились в рабочей зоне, а затем настраивает указанные регулируемые упоры по длине, чтобы при контакте:
- третьей подвижной платформы 49 с корпусом 38 (слева на фиг. 1), а регулируемого упора третьего поворотного барабана 54 с корпусом третьего линейного пневмопривода 55 положение фокуса объектива 20 находилось в плоскости коррекции I;
- регулируемого упора первого поворотного барабана 50 с корпусом второго линейного пневмопривода 51, а регулируемого упора второго поворотного барабана 53 с корпусом третьего линейного пневмопривода 55 положение фокуса объектива 20 находилось в плоскости коррекции II;
- третьей подвижной платформы 49 с корпусом 38 (слева на фиг. 1), а регулируемого упора второго поворотного барабана 53 с корпусом третьего линейного пневмопривода 55 положение фокуса объектива 20 находилось в плоскости коррекции III.
При балансировке любого количества гироскопов одного и того же типа перечисленные операции выполняются только один раз.
При балансировке динамически настраиваемых гироскопов иного типа с другими конструктивными особенностями ротора (радиусами коррекции и расстоянием между плоскостями коррекции) эти подготовительные операции повторяются (в частности, для иной механической кассеты 42 и другой группы регулируемых упоров поворотных барабанов 50, 53 и 54).
Балансируемый динамически настраиваемый гироскоп 10 при откинутых защитном кожухе 6 и системе 7 сдува устанавливается внутри корпуса 5, где базируется и закрепляется в приспособлении 9 и подключается к пульту 22 управления, затем закрывается защитный кожух 6. Приспособление 9, в котором закреплен гироскоп 10 в виброкамере 3, в исходном состоянии арретируется арретиром 16, что создает для него неподвижное основание.
В исходном состоянии сигналы на выходах блока 36 выходных регистров отсутствуют (на всех выходах сигнал логического нуля) и все системы выключены.
Оператор вносит в базу данных ЭВМ 33 с помощью клавиатуры исходные данные конкретного гироскопа 10, необходимые для расчета дисбалансов по формулам программы (коэффициенты передачи датчиков момента, угла и т.д.).
После этого происходит следующее:
ЭВМ 33 на время, достаточное для вакуумирования, выдает сигнал (логическая единица по выходу 2 блока 36 выходных регистров), который включает систему 18 создания рабочей среды, после чего происходит откачка воздуха из виброкамеры 3 до требуемого значения давления в пределах 10...1 мм рт. ст.
ЭВМ 33 на время, достаточное для термостатирования, выдает сигнал (логическая единица по выходу 13 блока 36 выходных регистров), который включает термостат 59, производящий нагрев гироскопа 10 до рабочей температуры, соответствующей данному типу гироскопа, например t = 90oC.
На время измерения дисбалансов гироскопа 10 ЭВМ 33 выдает сигнал (логическая единица по выходу 5 блока 36 выходных регистров), который включает подачу питающего напряжения на выходе блока 29 формирования напряжений питания гироскопа 10. После этого гироскоп 10 разгоняется до рабочей частоты fр вращения (время разгона t = 0,5...3 мин в зависимости от марки гироскопа). Частота fр вращения может контролироваться внешним частотомером (на чертеже условно не показан) по сигналу с датчика 15 опорного сигнала от светоконтрастной метки на роторе после усилителя-формирователя 30. Частота fр и фаза ϕ0 вращения, определяемые по указанной метке на роторе, являются опорными и на них настраиваются каналы 31 измерения величины и угла моментного дисбаланса и 32 формирования синусоидального сигнала вибрации.
Далее проводится измерение значения и угла моментного дисбаланса, ротора динамически настраиваемого гироскопа 10, проявляющегося в виде модуляции сигнала датчиков 11 и 12 угла из-за воздействия на ротор главного момента MD дисбалансов. Этот дисбаланс Dм определяют из спектра сигналов с одного из датчиков 11 (12) угла, например с выхода датчика 11 угла.
Спектр сигналов, первая гармоника которого имеет частоту вращения fр, аппаратно обрабатывается каналом 31 измерения величины и угла моментного дисбаланса.
Для этого после уменьшения по амплитуде в резистивном делителе 60, сигнал с выхода датчика 11 угла поступает на управляемый полосовой фильтр 61 с цифровым управлением, где из него выделяется синусоидальный сигнал, величина которого пропорциональна массе mм, а фаза - углу ϕм моментного дисбаланса.
Так как в различных типах гироскопов рабочая частота различная, то в предлагаемом устройстве приведена оригинальная схема фазовой синхронизации резонансной частоты управляемого полосового фильтра 61, с фазой и частотой вращения ротора гироскопа 10, обеспечивающая также формирование опорных сигналов, необходимых для измерения угла моментного дисбаланса. С этой целью на вход первого фазового детектора 69 поступает сигнал от датчика 15 опорного сигнала после усилителя-формирователя 30 и сравнивается с частотой, уменьшенной в 1000 раз с помощью делителя 68 частоты, управляемого напряжением генератора 67 импульсов. Разностный сигнал фильтруется во втором фильтре 70 нижних частот, интегрируется в первом интеграторе 71 и служит управляющим напряжением для генератора 67 импульсов. В результате на выходе генератора 67 импульсов будет поддерживаться частота, в 1000 раз большая частоты вращения гироскопа и синфазная с ней. После деления на 10 в делителе 72 частоты импульсы полученной частоты F0 = 100fр используется для синхронизации резонансной частоты полосового фильтра 61, управление которой осуществляется кодом с первого регистра 65, подаваемым с ЭВМ 33 (выходы 15-23 блока 36 выходных регистров), записываемым в нем по команде с ЭВМ 33 (импульс по выходу 14 блока 36 выходных регистров). В частности, например, при записи последовательности чисел 10, 11, 12, 23, 34, 35, 36, 27, 18, 19, 1A, 2B, 3C, 3D, 3E, 3F обеспечивается фильтрация на резонансной частоте гироскопа f = 240 Гц [5].
Сигнал с выхода полосового фильтра 61 после фильтрации в фильтре 63 нижних частот преобразуется преобразователем 64 в напряжение постоянного тока, соответствующее эффективному (среднеквадратичному) значению напряжения, пропорционального амплитуде первой гармоники, то есть величине моментного дисбаланса.
Это напряжение поступает на четвертый вход аналого-цифрового преобразователя 35, параллельный код на выходе которого соответствует величине модуляционного сигнала UМ, записывается в память ЭВМ 33.
Указанное напряжение служит для определения массы mм моментного дисбаланса по формуле:
mм = Kп•Uм, (1)
где Kп - постоянная прибора, включающая в себя как конструктивные параметры ротора, так и электрические параметры усилительно-преобразовательного тракта,
l - расстояние от центра неуравновешенных масс до центральной плоскости;
R - радиус ротора гироскопа 10;
K1 = Kду - крутизна датчика угла, мВ/мин;
K2 - коэффициент передачи резистивного делителя 60;
K3 - коэффициент усиления по переменной составляющей управляемого полосового фильтра 61.
Из гармонического напряжения с выхода полосового фильтра 61 с помощью компаратора 62 перехода через ноль выделяется фронт ϕc полученных прямоугольных импульсов, который определяет положение угла моментного дисбаланса ротора гироскопа 10. Далее данный сигнал вместе с сигналами от датчика 15 опорного сигнала и генератора 67 импульсов подается на счетчик 73 импульсов, код на параллельных выходах которого является величиной угла ϕм моментного дисбаланса, аппаратно определяемого как:
ϕм= ϕc+90°-ϕ0, (3)
где ϕ0 - фаза угла опорного сигнала с датчика 15.
Этот 9-ти разрядный двоичный код запоминается в регистре 74, по команде от ЭВМ (по выходу 22 блока 36 выходных регистров) записывается в ее памяти и обеспечивает измерение угла ϕм моментного дисбаланса с точностью ±0,5o.
После произведенных компьютером математических операций в соответствии с алгоритмом на экране монитора появляется сообщение о значении массы mм и угла ϕм моментного дисбаланса.
После этого проводится измерение массы mос осевого дисбаланса гироскопа 10, представляющего собой несовпадение центра его масс с центром подвеса ротора вдоль оси вращения.
Для этого аналого-цифровым преобразователем 34 по одному из входов 1 (2) измеряется его угловая скорость дрейфа в исходном положении виброкамеры 3 в пространстве. Величина измеренного сигнала пропорциональна току I0 с выхода датчика 13(14) моментов гироскопа 10.
ЭВМ 33 выдает сигнал (логическая единица по выходу 4 блока 36 выходных регистров), который включает четвертый линейный пневмопривод 56, который через преобразователь 57 приводит во вращение виброкамеру 3, поворачивая ее на 180o, и вновь производится указанное измерение. Величина измеренного сигнала пропорциональна току I180 с выхода датчика 13 (14) моментов гироскопа 10.
По программе ЭВМ вычисляет массу mос осевого дисбаланса:
где I0 - суммарный ток в курсовом канале в положении гироскопа 0o;
I180 - суммарный ток в курсовом канале в положении гироскопа 180o;
θ - широта места расположения гироскопа;
γ - азимут вертикальной плоскости, проходящей через ось вращения;
Iωз - ток в курсовом канале, вызванный угловой скоростью вращения Земли (константа);
l1 - расстояние от центра подвеса ротора до соответствующей плоскости коррекции.
Угол положения массы mос осевого дисбаланса не играет роли, так как дисбаланс направлен вдоль оси вращения ротора гироскопа 10. Знак его определяет плоскость коррекции, где он находится: "+" - плоскость I и "-" - плоскость III.
После произведенных компьютером математических операций в соответствии с алгоритмом на экране монитора появляется сообщение о значении массы mос осевого дисбаланса, после чего ЭВМ 33 выдает сигнал (логический ноль по выходу 4 блока 36 выходных регистров) и виброкамера 3 поворачивается на угол 180o в исходное положение.
Начинается измерение статического дисбаланса.
Измеряется угловая скорость дрейфа по обоим каналам 23 и 24 "электрической пружины". Для этого аналого-цифровым преобразователем 34 по обоим входам 1 и 2 измеряется его угловая скорость дрейфа в исходном положении виброкамеры 3 в пространстве. Величина измеренных сигналов пропорциональна токам I0x и I0y с выхода датчиков 13 и 14 моментов гироскопа 10.
ЭВМ 33 выдает сигналы, первый из которых выключает арретир и разарретирует приспособление 9 с гироскопом 10 в виброкамере 3 (логическая единица по выходу 3 блока 36 выходных регистров), второй - устанавливает коэффициент передачи усилителя 80 с регулируемым коэффициентом усиления (пятнадцатиразрядный код по выходам 23...38 блока 36 выходных регистров), а третий - на подачу сигнала вибрации из модуля измерения через усилитель мощности в вибратор 4 виброкамеры 3 (логическая единица по выходу 6 блока 36 выходных регистров).
Начинает работать канал 32 формирования синусоидального сигнала вибрации. Для синхронизации с частотой и фазой вращения ротора гироскопа 10 генератор 76 гармонических колебаний контура 75 автоматической подстройки частоты синхронизирован по фазе с сигналом с датчика 15 опорного сигнала, подаваемого на вход второго фазового детектора 77, где и сравнивается с частотой генератора 16 гармонических колебаний. Разностный сигнал фильтруется в третьем фильтре 78 и после интегрирования во втором интеграторе 79 служит управляющим напряжением для генератора 16 гармонических колебаний, подстраивая частоту и фазу генерируемого гармонического напряжения с частотой и фазой вращения ротора. В зависимости от требований к величине виброускорения вибратора 4, различного для различных типов гироскопов, это напряжение изменяется по амплитуде в управляемом от ЭВМ 33 усилителе 80 с регулируемым коэффициентом усиления и после усиления в усилителе 81 мощности поступает на вибратор 4. Для предотвращения возбуждения вибратора 4 при измерении других дисбалансов выход усилителя 18 мощности закорачивается по сигналу от ЭВМ.
Контроль амплитуды amax виброускорения осуществляется по команде с ЭВМ 33 с датчика 17 вибрации через аналого-цифровой преобразователь 34.
Аналогично измеряется угловая скорость дрейфа по обоим каналам 23 и 24 "электрической пружины" при включенной вибрации. Величина измеренных сигналов при постоянном значении амплитуды виброускорения пропорциональна токам Ix и Iy с выхода датчиков 13 и 14 моментов гироскопа 10.
По программе ЭВМ вычисляет массу mст и угол ϕст статического дисбаланса:
где K - коэффициент, определяемый крутизной системы: датчик момента - усилитель;
H - кинетический момент ротора гироскопа.
Так как виброускорение вибрации синхронизировано с сигналом датчика 15 опорного сигнала с ротора гироскопа 10, то угол коррекции неуравновешенности ϕ определялся из выражения:
На экране монитора ЭВМ 33 появляется сообщение об измеренных значениях статического дисбаланса.
ЭВМ 33 выдает сигналы, первый из которых включает арретир и арретирует приспособление 9 с гироскопом 10 в виброкамере 3 (логический ноль по выходу 3 блока 36 выходных регистров), второй прекращает подачу сигнала вибрации через усилитель мощности в вибратор 4 виброкамеры 3 (логический ноль по выходу 6 блока 36 выходных регистров), третий прекращает вращение ротора гироскопа 10 (логический ноль по выходу 5 блока 36 выходных регистров), выключая напряжение питания гироскопа 10; четвертый отключает систему 18 создания рабочей среды и развакуумирует виброкамеру 3 (логический ноль по выходу 2 блока 36 выходных регистров), а пятый отключает термостат 59 (логический ноль по выходу 13 блока 36 выходных регистров), выключая нагрев гироскопа.
После остановки гироскопа 10 на первом этапе оператор приступает к коррекции моментного дисбаланса в виде коррекции одинаковых неуравновешенных масс mм в плоскостях III и I коррекции, для чего откидывает защитный кожух 6, поворачивает систему 7 сдува в рабочее положение и, совмещая прорезь 90 с положением плоскостей коррекции, устанавливает систему 7 сдува между ротором гироскопа 10 и фокусирующим объективом 20 для предотвращения попадания продуктов эрозии вовнутрь гироскопа 10. Далее поворачивает ротор до совпадения светоконтрастной метки на нем с делением на шкале индикаторного лимба 83, соответствующим углу ϕм моментного дисбаланса. При этом "тяжелое место" ротора оказывается расположенным в вертикальной плоскости, т.е. в плоскости лазерного излучения.
Начинается установка фокуса объектива 20 относительно плоскости коррекции III.
ЭВМ 33 подает соответствующие команды на первый - третий линейные пневмоприводы 41, 51 и 55 и трехпозиционный пневмопривод 46.
По команде на второй линейный пневмопривод 51 (логическая единица по выходу 7 блока 36 выходных регистров) платформа 49 переместится вправо до касания регулируемым упором первого поворотного барабана 50 корпуса второго линейного пневмопривода 51.
По команде на третий линейный пневмопривод 55 (логическая единица по выходу 8 блока 36 выходных регистров) платформа 52 переместится вправо до касания регулируемым упором третьего поворотного барабана 54 корпуса третьего линейного пневмопривода 55.
По команде на трехпозиционный пневмопривод 46 (двоичный код 11 по выходам 9-10 блока 36 выходных регистров), последний переместит механическую кассету 42 с вертикальными профилями 43, 44 и 45 таким образом, чтобы под хвостовиком платформы 4 оказался профиль 45.
Подается команда на первый линейный пневмопривод 41 (логическая единица по выходу 11 блока 36 выходных регистров) и первая подвижная платформа 40 поднимается вверх до упора в горизонтальные упоры 39 корпуса 38, поднимая при этом за счет механического контакта профиля 45 с упором 48 через вторую - четвертую подвижные платформы 47, 49 и 52 лазер 19 совместно с фокусирующим объективом 20.
В результате этих перемещений фокус объектива 19 будет направлен на плоскость коррекции III и будет отстоять от поверхности ротора гироскопа 10 на расстоянии, равном фокусному.
Производится коррекция неуравновешенной массы mм в плоскости коррекции III.
ЭВМ 33 включают электропневмоклапан 8 и, следовательно, подает сжатый газ в систему 7 сдува (логическая единица на время коррекции по выходу 1 блока 36 выходных регистров). Возникает направленный поток газа, который через канал 84 сдува продуктов эрозии: воздухораспределитель 85, сопло 86, направляется на соответствующую плоскость коррекции ротора, защищая его поверхность и фокусирующий объектив 20 от продуктов эрозии, возникающих при лазерном воздействии. Через промежуток времени (t = 0,1 с), достаточный для срабатывания электропневмоклапана 8, импульсами с ЭВМ 33 на вход системы 21 управления осуществляется многократный запуск лазера 10 (Количество импульсов, поступающих по выходу 7 блока 36 выходных регистров, пропорционально величине неуравновешенной массы).
Лазерное излучение, пройдя через стеклянную пластину 87, попадает через прорезь 90 на образующую ротора и удаляет неуравновешенную массу mм в плоскости III коррекции. Защитный газ, проходя пространство между стеклянной пластиной 87, металлическим корпусом 88 и защитным элементом 89, увлекает продукты эрозии в короб 92 и лабиринтный отражатель 93 ловушки 91, где охлаждаются и теряют энергию за счет многократного отражения от стенок.
Подается команда на первый линейный пневмопривод 41 (логический ноль по выходу 11 блока 36 выходных регистров) и первая подвижная платформа 40 опустится, опустив на горизонтальные упоры 39 корпуса 38, вторую - четвертую подвижные платформы 47, 49 и 52, а следовательно, и лазер 19 совместно с фокусирующим объективом 20.
По команде на третий линейный пневмопривод 55 (логический ноль по выходу 8 блока 36 выходных регистров) платформа 52 переместится влево до касания регулируемым упором второго поворотного барабана 53 корпуса третьего линейного пневмопривода 55.
По команде на трехпозиционный пневмопривод 46 (двоичный код 01 по выходам 9-10 блока 36 выходных регистров), последний переместит механическую кассету 42 с вертикальными профилями 43, 44 и 45 таким образом, чтобы под хвостовиком платформы 4 оказался профиль 43.
Подается команда на первый линейный пневмопривод 41 (логическая единица по выходу 11 блока 36 выходных регистров) и первая подвижная платформа 40 поднимается вверх до упора в горизонтальные упоры 39 корпуса 38, поднимая при этом за счет механического контакта профиля 45 с упором 48 через вторую - четвертую подвижные платформы 47, 49 и 52 лазер 19 совместно с фокусирующим объективом 20.
В результате этих перемещений фокус объектива 19 будет направлен на плоскость коррекции 1 и будет отстоять от поверхности ротора гироскопа 10 на расстоянии, равном фокусному.
Оператор поворачивает ротор на 180o и, аналогично вышеописанному, по командам с ЭВМ 33 осуществляет синхронизированные импульсы - сдув, в результате которых с плоскости коррекции I снимается и удаляется в ловушку 91 вторая корректируемая масса mм.
Подается команда на первый линейный пневмопривод 41 (логический ноль по выходу 11 блока 36 выходных регистров) и первая подвижная платформа 40 опустится, опустив на горизонтальные упоры 39 корпуса 38 вторую - четвертую подвижные платформы 47, 49 и 52, а следовательно, и лазер 19 совместно с фокусирующим объективом 20.
На втором этапе происходит коррекция осевого дисбаланса, для чего манипулятор 37 устанавливает фокус объектива по ранее изложенному принципу в плоскости I или III коррекции (в зависимости от знака дисбаланса), а затем осуществляет коррекцию массы mос из двух диаметрально противоположных точек плоскости I или III коррекции.
На третьем этапе происходит коррекция статического дисбаланса в плоскости II коррекции, для чего по команде на второй линейный пневмопривод 51 (логический ноль по выходу 7 блока 36 выходных регистров) платформа 49 переместится влево до касания ее корпусом корпуса 38 манипулятора 37.
По команде на трехпозиционный пневмопривод 46 (двоичный код 10 по выходам 9-10 блока 36 выходных регистров), последний переместит механическую кассету 42 с вертикальными профилями 43, 44 и 45 таким образом, чтобы под хвостовиком платформы 4 оказался профиль 44.
По команде на первый линейный пневмопривод 41 (логическая единица по выходу 11 блока 36 выходных регистров) фокус объектива 19 будет направлен на плоскость коррекции II и будет отстоять от поверхности ротора гироскопа 10 в указанной плоскости коррекции на расстоянии, равном фокусному, а затем осуществляет коррекцию массы mст под углом ϕст в плоскости II коррекции.
ЭВМ 33 выключает электропневмоклапан 8 и прекращает подачу сжатого газа в систему 7 сдува (логический ноль по выходу 1 блока 36 выходных регистров) и лазер 10 (логический ноль по выходу 7 блока 36 выходных регистров). Платформы 49 и 52 находятся в произвольных положениях, платформа 47 - на упорах 39, платформа 40 опущена, хвостовик платформы освобожден, кассета 42 - в произвольном положении.
На этом процесс балансировки заканчивается, а гироскоп 10 удаляется.
Применение в предлагаемом устройстве оригинальных конструкций манипулятора, системы сдува, приспособления и схем построения каналов измерения величины и угла моментного дисбаланса и формирования синусоидального сигнала вибрации в совокупности с программным управлением от ЭВМ обеспечивает повышение точности и производительности процесса определения и коррекции моментного, статического и осевого дисбалансов роторов динамически настраиваемых гироскопов различных типов (с различными частотами вращения и различными условиями окружающей ротор среды: остаточным давлением и температурой ротора) и конструктивных особенностей роторов (радиусов расположения зон коррекции на роторе и расстояний между плоскостями коррекции) при быстром переходе от одного типа гироскопа к другому.
В частности, для перехода от одного типа гироскопа к другому при условии предварительного одноразового внесения особенностей гироскопа в базу данных компьютера и соответствующей одноразовой подготовки устройства в виде настройки кассет, индивидуальных для каждого типа гироскопа, и регулировки упоров пневмоприводов, соответствующих типам гироскопов, необходимо проделать следующее:
- вынуть кассету для предыдущего типа гироскопа;
- вставить кассету для типа балансируемого гироскопа;
- повернуть барабаны пневмодвигателей так, чтобы регулируемые упоры с соответствующим наименованием типа гироскопа расположились в рабочей зоне (плоскости чертежа);
- набрать на клавиатуре компьютера код нужного типа гироскопа и подать команду выполнения программы.
После этого все семь необходимых особенностей конкретного типа гироскопа будут автоматически учитываться в процессе лазерной балансировки согласно алгоритму программы.
Источники информации, принятые во внимание
1. Патент США N 3935746, кл. G 01 M 1/22, 1976.
2. Авторское свидетельство СССР N 1226090, кл. G 01 M 1/38, Бюл. N 15, 23.04.85 (прототип).
3. Каталог фирмы MAXIM (США), 1992 г., стр. 3-31.
4. CD-ROM каталог фирмы BURR-BROWN (США), файл VCA610.pdf.
5. Каталог фирмы ANALOG DEVICE том 1, 1997, стр. 2-139.
6. Каталог фирмы MAXIM (США), 1995 г., стр. 1-9.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОЛУАВТОМАТИЧЕСКИЙ БАЛАНСИРОВОЧНЫЙ СТАНОК | 2012 |
|
RU2515102C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ БАЛАНСИРОВКИ РЕЗОНАТОРА ТВЕРДОТЕЛЬНОГО ВОЛНОВОГО ГИРОСКОПА ЛУЧОМ ЛАЗЕРА | 1993 |
|
RU2079107C1 |
| СПОСОБ ГРАДУИРОВКИ АКСЕЛЕРОМЕТРОВ И ПОВОРОТНАЯ УСТАНОВКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2184979C1 |
| СПОСОБ ГРАДУИРОВКИ АКСЕЛЕРОМЕТРОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2165088C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ИСТИННОГО КУРСА С ПОМОЩЬЮ ДВУХКАНАЛЬНОГО ГИРОСКОПИЧЕСКОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ | 2000 |
|
RU2176780C1 |
| ФУНКЦИОНАЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ КОДА УГЛА В СИНУСНО-КОСИНУСНЫЕ НАПРЯЖЕНИЯ | 2001 |
|
RU2196383C1 |
| Устройство для автоматической балансировки роторов гироскопов | 1982 |
|
SU1055980A1 |
| СПОСОБ ГИРОКОМПАСИРОВАНИЯ С ПРИМЕНЕНИЕМ ГИРОСКОПИЧЕСКОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ И КОМБИНИРОВАННОЙ КОМПЕНСАЦИИ ЕГО ДРЕЙФА | 2001 |
|
RU2189564C1 |
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 2000 |
|
RU2178569C1 |
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 2002 |
|
RU2216713C2 |
Использование: в балансировочной технике. Устройство содержит горизонтально расположенную вращающуюся виброкамеру, обеспечивающую вращение вокруг горизонтальной оси в пределах угла 180o, снабженную вибратором, системами сдува, создания среды и термостатирования гироскопа и приспособлением для установки и закрепления гироскопа, лазер с фокусирующим объектом и системой управления, манипулятор перемещения лазера, пульт управления, каналы измерения величины и угла моментного дисбаланса и формирования синусоидального сигнала вибрации, управляющую ЭВМ с интерфейсами, обеспечивающую автоматическое управление узлами и измерительными каналами устройства в процессе подготовки, измерения и коррекции моментного, осевого и статического дисбалансов ротора гироскопа в рабочих условиях его эксплуатации. Технический результат - повышение точности, универсальности и производительности балансировки гироскопов в условиях расширенной номенклатуры их типов и конструктивных особенностей обеспечивается тем, что в состав устройства введены оригинальные манипулятор, элементы виброкамеры, система сдува с многократным отражением продуктов эрозии и схемы построения каналов измерения величины и угла моментного дисбаланса и формирования синусоидального сигнала вибрации в совокупности с программным управлением от ЭВМ. 1 з.п. ф-лы, 5 ил.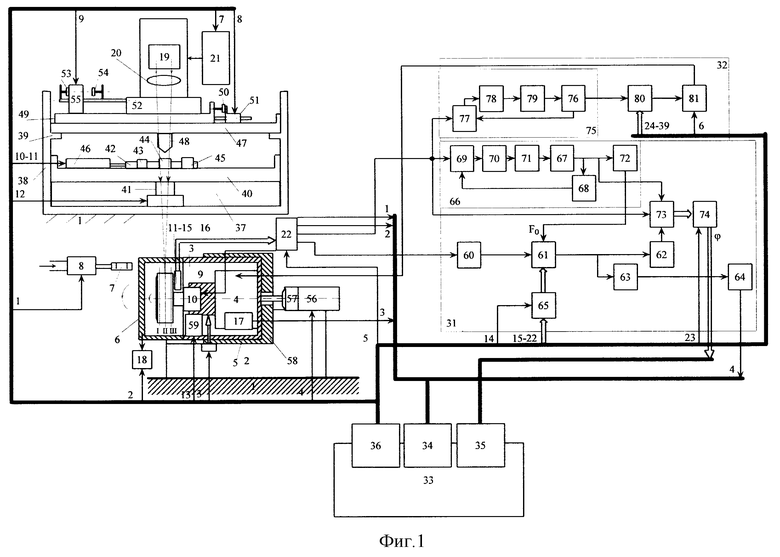
| Устройство для автоматической балансировки роторов гироскопов | 1985 |
|
SU1226090A1 |
| Устройство для динамической балансировки роторов лучом лазера | 1988 |
|
SU1515086A2 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ БАЛАНСИРОВКИ РЕЗОНАТОРА ТВЕРДОТЕЛЬНОГО ВОЛНОВОГО ГИРОСКОПА ЛУЧОМ ЛАЗЕРА | 1993 |
|
RU2079107C1 |

