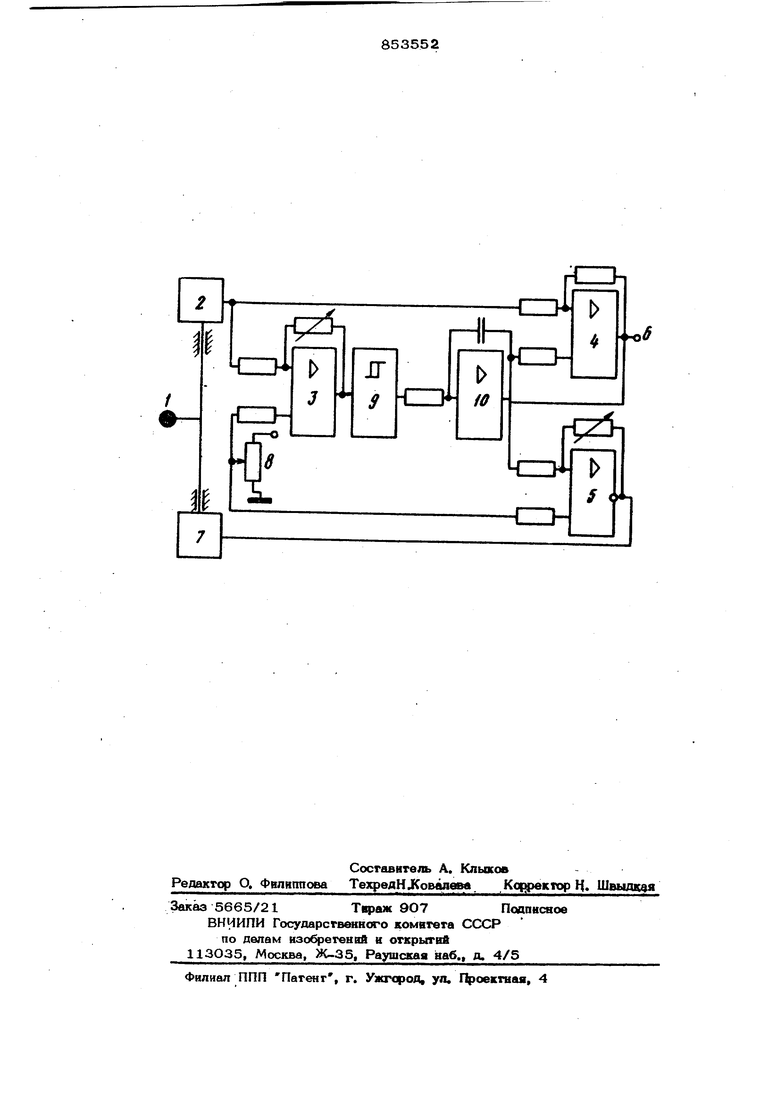
Изобрегение огноснгся к измеркгелям линейных ускорений и можег быть ис пользовано для измерения ускорения в навигационных системах управления и сгабилиз шии летательных аппаратов. Известны акселерометры компенсационного тяпа, содержащие физический маятник, датчик угла и датчик момента, подключенные соответственно ко входу и выходу усилителя обратной связи l. Однако известные акселерометры обла- дают характерным недостатком - наличием зоны нечувствительности. Наиболее близким по технической сущности и достигаемому эффекту к предлагаемому является устройство, содержащее инерционную массу, датчик угла, тчик момента, предварительный усилитель и сум матор, первые входы которых соединены с вьосодом датчика угла, усилитель о атной связи, один из входов котсчэого соединен с выходом сумматора, а выход - со входом датчика момента, установочный резистор, подвижный контакт которого под ключен ко второму входу предварительного усилителя, триггер Шмитта и интеграор 2. Недостатком этого устройства является невыссжая точность измерения за счет того, что дрейф нуля выходного усилителя и его динамическая погрешность полностью входят в погрешность aKceflepONteTpa. Цель изобретения - повышение точности измерения. Это обеспечивается тем, что подвижный контакт установочного резистора через предварительный усилитель и триггер Шмитта соединен со входом интегратора, выход которого подключен ко второму входу сумматора, а подвижный кс«такт установочного резистсч а соединен со вторым входом усилителя обратной связи. На чертеже представлена функциональная схема аксе{1ерометра. Акселерометр содержит инерционную массу 1, Датчик угла 2, подключенный к входам предварительного усилителя 3 и выходного сумматора 4, выход когорого соединен с первым входом усилнгеля обрагной связи 5 и выходной клеммой 6, Датчик момента 7 через усилитель обратной связи 5 соединен с вькодной клем мой 6, Подвижный кс«такт установочного резистора 8 соединен со вторыми входами предварительного усилителя 3 и усилителя обратной связи 5. Выход усилителя 3 через триггер Шмитта 9 и интегратор Ю соединен со вторым входом выходного сумматора 4, Регулируемым резистором 8 устанавливается рабочая точка акселерометра а ( fpT ).. Акселерометр работает следующим образом. При отсутствии входного воздействия триггер Шмитта находится в таком состоянии, что на его эькоде имеется положительный сигнал (при условии, что ) Это приводит к формированиюша выходе интегратора LO линейно возрастающего сигнала 0, , который через выходной сумматор 4 и усилитель обратной связи 5 подается на вход датчика момента 7. В когда Ujn становится момент времени, больше сигнала, соответствующего зоне нечувствительности Uaui подвижная система акселерометра начинает движение. С выхода датчика утла 2 снимается сигнал отрицательной полярности, которьй суммируется на входе предварительного усилителя 3 с сигналом UDT снимаемым с установочного резистс а 8. Увеличение дополнительного сигнала и происходит до момента времени, ког да на выходе предварительного.усилителя; 3 появится сигнал отрицательной полярности, т.е. ,,o, со где и - выходной сигнал датчика . Это привадит к изменению внутреннего состояния триггера Шмитта 9 и на ег выходе появляется сигнал отрицательной полярности. В этом случае сигнал U начинает линейно убывать. В момент времени, когда он уменьшится на величину, большую сигнала, соответствующего зоне нечувствитшьйостн, подвижная система акселерометра изменит направление движе ния, что приводит к умень цению по абсолютной величине сигнала с выхода датчика угла (JQ.. В момент времени, когда происходит изменение внутреннего г;остояния триггера Шмитта, и сигнал хода интегратора начинает линейно возрастать до выполнения равенства (1). В дальнейшем работа схем аналогична. Таким офазом, с .выхода акселерометра снимается периодический сигнал (J,. среднее значение которсго равно нулю При наличии входного воздействия () акселерометр работает следующим образом. Если входное воздействие положительной полярности ((ju-v 70). го ШВл выполняется при увеличении сигнала U. на величину, пропорциональную входному воздействию, что гфоисходит в переходном режиме. В дальнейшем работа схемы аналогична. При этом равенство (2) выполняется вследствие уменьшения выходного сигнала акселерометра на величину, соответствующую зоне нечувствительности. При наличии входного воздействия (ВХ -) отрицательной полярности (Швх -) выполнение равенства (l) обеспечивается увеличением отрицательного значения сигнала ( . По окончании переходного процесса схема работает так же, как и при отсутствии входного воздействия. Формула изобретения Акселерометр, содержащий инерционную массу, датчик угла, датчик момента, предварительньШ усилитель и сумматор, первые входы которых соединены с вьосодом датчика угла, усилитель обратной связи, один из входов которого соединен с выходом сумматрра, а выход - со входом датчика момента, установочный резистор, подвижный контакт подключен ко второму входу предварительнсго усилителя, триггер Шмитта и интегратор, oтJtичaющ и и с я тем, что, с целью повышения точности, выход предварительного усилителя через соединенные последовательно триггер Шмитта и интегратор подключен ко второму входу сумматора , а подвижный контакт установочного резистора соединен со вторым входом усилителя обратной связи.. Источники информации, принятые во внимание при экспертизе 1,Авторское свидетельство СССР № 404О16, кл. G О1 Р 1S/O8, 1973. 2.Авторское свидетельство СССР № 591776, кл. G О1 Р 15/О8, 1976 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2010 |
|
RU2449292C1 |
| Устройство для направленной защиты от однофазного замыкания на землю в сети с изолированной нейтралью | 1981 |
|
SU1034115A1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2009 |
|
RU2415442C1 |
| Устройство для измерения ускорений | 2021 |
|
RU2758196C1 |
| Измерительный преобразователь напряжения в частоту | 1984 |
|
SU1218467A1 |
| Акселерометр | 2017 |
|
RU2653140C1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО НАПРАВЛЕНИЯ ДВИЖЕНИЯ КОЛЕСНОГО ТРАКТОРА | 1970 |
|
SU266413A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСКОРЕНИЙ | 2005 |
|
RU2279094C1 |
| Дискретно-аналоговый интегратор | 1986 |
|
SU1372337A1 |
| ФУНКЦИОНАЛЬНЫЙ ГЕНЕРАТОР | 2001 |
|
RU2221327C2 |