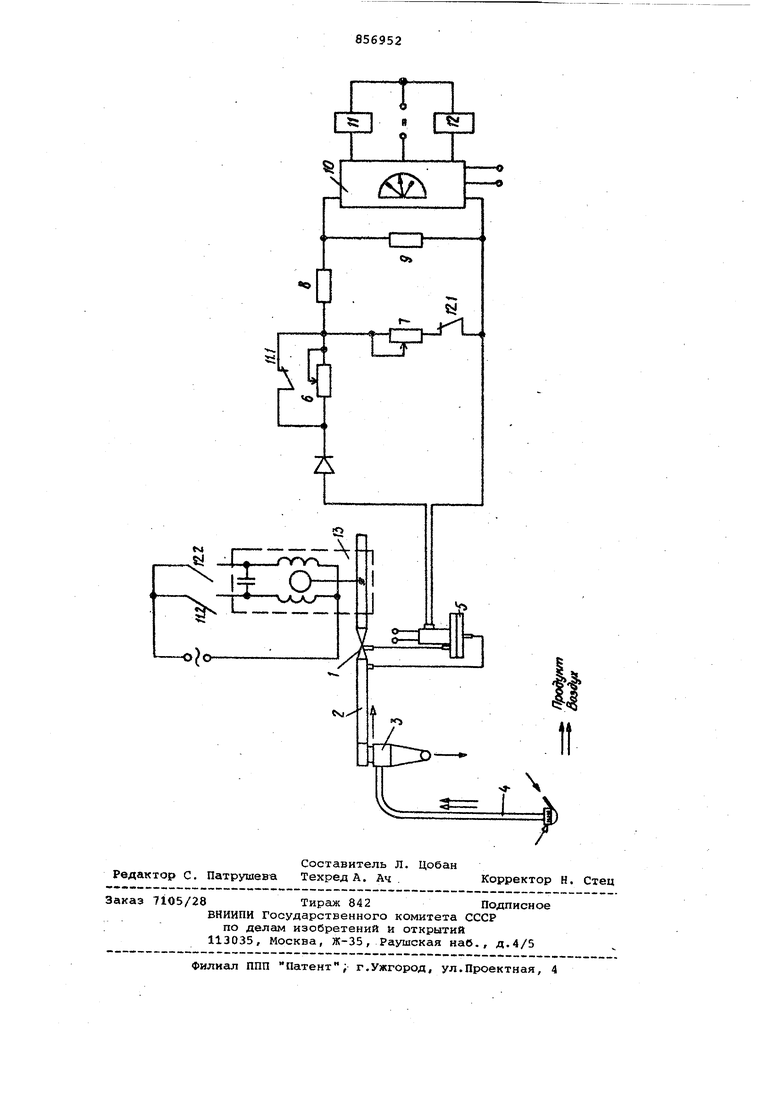
адей знакопеременные циклические нагрузки при пульсирующем режиме работы устройства, в результатечего снижается его надежность. Кроме того,, в указанном устройстве отсутствует возможность дистанционно контролировать регулируемый параметр и устанавливать его заданное значение, так как в устройстве ;применен дифманометр с пружинным задатчиком. Недостатком также является дискретность параметров динамической настройки устройства, устанавливаемых путем .замены калиброванных пневматических дросселей в пневматических магистралях устройства. Цель изобретения - повышение надежности работы устройства , облегчение его настройки и эксплуатации. Эта цель достигается тем, что преобразователь разности давлений 1выполнен аналоговым, трехпозиционный релейный элемент выполнен на электроизмерительном приборе, снабженном регулируемыми контактаг/1и верхнего и нижнего пределов срабатывания, а цепи обратной связи образованы резисторами, один из которых включен последовательно с прибором и зашунтированным размыкающим контактом промежуточного реле верхнего предела срабатывания, а второй включен параллельно с злектроизмерительным прибором и последовательно с ра мыкающим контактом реле нижнего пре дела срабатывания, На чертеже показана схема устройства. Устройство содержит сопло Вентури 1, установленное в воздуховоде 2 отводящем очищенный от продукта воздух из циклона 3 пневмотранспортера 4 в вентилятор (на чертеже не показан). Сопло соединено с преобра зователем 5 разности давлений, имею щим аналоговый электрический выход. В качестве преобразователя может быть использован дифференциальный тягомер ДГ-2, либо любой другой дифманометр с электрическим аналоговым выходным сигналом. Выход преобразователя 5 подключён к измерительной схеме, в которую входят переменные ре;зисторы 6 и 7 обратной связи. Резисторы 8 и 9 также входят в измерительную схему и служат для статической настройки устройства. . Измерительная схема подключена к эл троизмерительному прибору 10, в качестве которого могут быть использо ваны электроизмерительные контактны приборы М 303 К, М 333 К -или М 1330 снабженные трехпозиционным контактным узлом срегулируемыми пределами срабатывания. К контактному выходу прибора 10 подключены промежуточные реле 11 (верхнего предела срабатыва ния) и 12 (нижнего предела), причем размыкакидий контакт 11.1 реле 11 вк ен параллельно резистору б, а размыкающий контакт 12.1 реле 12 последовательно с резистором 7. Замьжшощий контакт 11,2 реле 11 и замыкающий контакт 12,2 реле 12 включены в цепь управления заслоночным исполнительным механизмом 13. Устройство работает следующим образом. В случае, когда значение скорости воздуха в пневмотранспортере 4 лежит в заданных пределах, устройство находится в равновесии, то есть величина тока f протекающего через прибор 10, находится в заданных пределах срабатывания контактного узла прибора. При увеличении скорости воздуха {например в случае уменьшения родачи продукта) разность давлений в сопле Вентури 1 возрастает. Возрастает также величина сигнала на выходе преобразователя 5 и тока через прибор 10. Когда величина тока пре- вышает верхний предел срабатывания , контактный узел включает реле 11. При этом контакт 11,2 включает исполнительный механизм 13, который, закрываясь, уменьшает скорость воздуха. Одновременно размыкается контакт 11,1 и резистор б оказывается включенным последовательно с прибог ром 12, в результате чего ток через.прибор уменьшается и становится ниже верхнего предела срабатывания, При этом реле 11 отключается, исполнительный механизм 13 останавливается, а контакт 11 вновь Зс1мыкается. Поскольку измерительная система прибора 12 обладает определенной инерцией, обусловленной массой подвижных частей и взаимодействием PCIMки с магнитныгл полем, между моментом размыкания контакта 11.1 и моментом отключения исполнительного механизма проходит некоторый отрезок времени, определяющий длительность включения исполнительного механизма. При этом исполнительный механизм работает как интегратор импульса , сформированного на выходе прибора 12. Если за время работы исполнительнбго механизма 13 величина скорости воздуха не вошла в заданные пределы, то после замыкания контакта 11.1 величина тока вновь превысит верхний предел и процесс формирования и1-шульса на выxoj5e прибора 10 повторится. При этом по уже упомянутой причине между моментом замыкания контакта 11.1 и моментом повторного срабатывания Контактного узла прибора 10 пройдет отрезок времени, «определяющий длительность паузы между двумя последовательными импульсами . Импульсный режим будет осу1аествляться до тех пор, пока значение скорости воздуха не войдет в заданные пределы. При уменьшении скорости воздуха (например в результате увеличения подачи продукта) величина тока становится меньше нижнего предала ерабатывания, включается реле 12, замыкается контакт 12.2 f а контакт ;Э размыкается. Исполнительный меха изм 13 начинает открываться, а ре зистор 7 перестает шунтировать прибор 12, в результате чего ток через прибор возрастает. Дальнейший процесс формирования импульсного режима аналогичен описанно /1у. Инерционность измерительной системы прибора 10 зависит, как извест от величины внешнего сопротивления присоединенной к нему цепи. Пос кольку выходное сопротивление преоб разователя 5 постоянно, а сопротивление резисторов 8 и 9 подбирается при статической настройке, т.е. при равновесии схемы, TOf изменяя сопротивление резисторов б и 7 , можно изменять частоту следования и скваж ность импульсов, т.е. осуществлять динамическую настройку устройства. Выполнение резисторов переменными позволяет плавно производить настро ку. Поскольку сигналы обратной связи вводятся на вход прибора 12 , то мем брана преобразователя 5 не испытывает знакопеременных циклических нагрузок, что повышает надежность всего устройства. Использование в устройстве прибора 12 позволяет по показаниям стрелки дистанционно контролировать скорость воздуха в пневмотранспортере, а также дистанционно устанавливать Зсщанное значение скорости, регулируя подвижные контакты прибора 12. Внедрение устройства на пневмотранспорт ных установках предприятия системы заготовок позволит на 25-30 снизить энергоемкость этих установок. Формула изобретения Устройство для автоматического регулирования скорости воздуха в пневмотранспортере, содержащее сопло Вентури, присоединенный к нему мембранный преобразователь разности давлений, соединенный ее входом трехпозиционного релейного элемента , выход которого через промежуточнью реле верхнего и нижнего пределов срабатывания связан с цепью управления заслоночным исполнительным механизмом и со входами двух переключаемых цепей отрицательной инерционной обратной связи, отличающееся тем, что с целью .повышения надежности работы устройства и облегчения его настройки и эксплуатации, преобразователь разности давлений выполнен аналоговым, трехпозиционный релейный элемент выполнен на электроизмерительном приборе, снабженном регулируе ыми контактами верхнего и нижнего предалов срабатывания , а цепи обратной связи образованы резисторги 1и, один из которых включен последовательно с прибором и зашунтирован размыкающими контактагли промежуточного реле верхнего предела срабатывания, а второй включен параллельно с электроизмерительным прибором и последовательно с размыкающим контактом рее нижнего предела срабатывания. Источники информации, принятые во внимание при экспертизе 1.Городецкий А.Э. и др. Автоматическое регулирование работы пневмотранспортных сетей на мельницах. Мукомольно-элеваторная и комбикормовая промышленность. М., 1974/ 11 , с. 27-28. 2.Ptuskin А.Т. Shtltelman 8.А. Automatic control of low-concentre11 on pneumatic conveyer proceedings of the second conference on pneumatic conveying. Hungary, Pecs, 1518 March, 1978, pp. 31-36 (прототип).
LSJ LEJ
k
CDo
«
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического регулирования скорости воздуха в пневмотранспортере | 1983 |
|
SU1123968A2 |
| Устройство для автоматической раз-гРузКи гидРОКлАССифиКАциОННыХ АппА-PATOB | 1979 |
|
SU812346A1 |
| Регулятор давления для насосной станции магистрального трубопровода | 1985 |
|
SU1256002A2 |
| СИГНАЛИЗАТОР НАЧАЛА ОБЛЕДЕНЕНИЯ ПРОВОДОВ ВОЗДУШНЫХ ЛИНИЙ ЭЛЕКТРОПЕРЕДАЧИ | 1995 |
|
RU2080723C1 |
| МОДУЛЬНАЯ ИНЖЕНЕРНАЯ СИСТЕМА | 2006 |
|
RU2363973C2 |
| УСТРОЙСТВО КОНТРОЛЯ ФАЗ ТРЕХФАЗНОЙ СЕТИ | 1991 |
|
RU2022287C1 |
| УСТРОЙСТВО ДЛЯ ЗАРЯДА АККУМУЛЯТОРНОЙ БАТАРЕИ АСИММЕТРИЧНЫМ ТОКОМ | 1992 |
|
RU2025022C1 |
| Устройство для автоматического включения напряжения на секционированном участке контактной сети | 1981 |
|
SU958159A1 |
| Устройство для сортировки кусков губчатого титана | 1981 |
|
SU967572A1 |
| Устройство для ресурсных испытаний электрических переключателей | 1978 |
|
SU744479A1 |