формировании электромагнитного поля на калсдом участке с помощью последо- ватепьности опрашивакщих импульсов и преобразовании электромагнитного поля в электрические импульсы.
Устрс ство для осуществления способа содержит планшет с системами ээаимноортогональных координатных шин, соединенных с едними.из выходов блока управления, другие выходы ко-i торого подключены к одним из управЛЯЮИ1ИХ-входов блоков определения координат, съемник информации, индуктивно связанный с координатными шинами планшета и подключенный к входу усилителя, генератор опрашивающих импульсов, подключенный к счетным входам блоков определения координат и через делитель частоты - к соду блока управления 2,
Однако и этот известный способ и устройство для его. осуществления не обеипечивает достаточно высокой точ-i мости считывания, поскольку зависит мость электромагнитной связи съемника координат и шины от разделяющего их расстояния является Нелинейной, Кроме того, значение координат, измеренных, таким способом, зависит от толщины носителя.
Цель изобретения -. повышение точности считывания.
Указанная цель в предлагаемом способе достигается тем, что выделяют сигнал огибающей электрических импуль-сов путем I низкочастотной фильтрации, фиксируют временной интервал от момента начала формирования последовательности опрашиваквдих импульсов до.момента перехода сигнала ог ибаю1дей Через нулевой уровень и по полученному временному интервалу судят о координате считываемой точки.
Устройство содержит последовательно соединенные фильтр низкой частоты и пороговый элемент, выход которого подключен к ддаугим управлякнцим входа блоков определения координат, а выход усилителя соединен с входом фильра Низкой частоты.
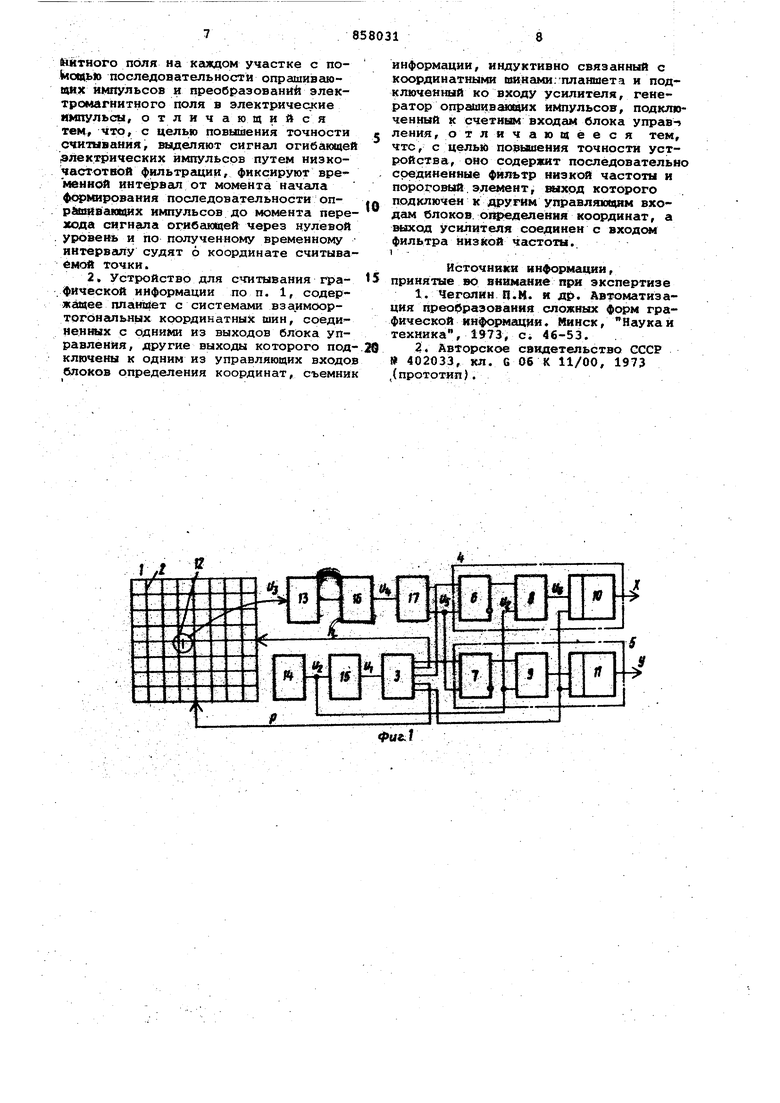
На фиг. 1 изображено устройство ДЛИ осуществления способа; на фиг. 2 - временные диагралилы, поясняюошв работу устройства и раскрывающие - сущность способа.
Устройство (фиг. 1) содержит планшет. 1 с системой взаимоортогональных прямолинейных, изолированных дру г от друга проводящих координатных шин 2, блок 3 управления, блоки 4 и 5 опЕдеделения кбординат, каждый из которых состоит йэ последовательно соединенных триггера 6(7), логического элемента И 8(9) и счетчика 10(11); съемник 12 инфсфмацйи, (вычокочастотный) .у Т1ии1ель 13, генера ор опраыивакяцих импул5 сов, делитель 15 частоты, фильтр 16 низкой частоты и порог вый элемент 17. Токопроводящие шины 2 планшета 1 соединены с выходами блока 3 управления, который входом , через делитель 15 частоты подключен к выходу генератора 14, а другими выходами - к одним из установочных входов триггеров 6 и 7. Съемник 12 координат индуктивно связан с шинами 2 и через последовательно соединенные усилитель 13, фильтр 16 низкой частоты и пороговый элемент 17 подключен, к другим установочным входам триггеров б и 7. В блоках 4 и 5 определения координат триггер 6(7), логический элемент И 8(9) и счетчик 10(11) соединены последовательно, причем свободный вход логического элмента 8(9) подключен к выходу генерат,ора 14.
На фиг. 2 показаны сечение участка планшета в направлении оси X; шины 2, находящиеся в корпусе планшета 1; съемник 12, восполненный в виде линзы, на цилиндрической поверхности которой разметаается катушка 18; носитель 19 графической информации, толщина которого может изменяться временная диаграмма напряжения U.(t) управлякяцего токовыми импульсами опрса шин, и временные диаграк вл напряЯ«ений: U 2.( t) - на выходе генератора 14« (t) - на выходе усилителя 13, Ujj(t) - на выходе фильтра 16, Uy(t) на исходе порогового элемента 17 и U(t) - на выходе счетчика 10 координат.
Сущность способа состоит в следую щем.
Импульсами опроса последовательно во времени одна за другой возбуждаются ишны в начале по одной, а затем и по другой координатным осям. В результате над поверхностью планшета один за ДРУГИМ в двух ортогональиах направлениях пробегают радиоимпульсов. Они перемещаются над планшетом дискретно - от одной шины к другой. С помощью индукционной катушки 1В съемника 12 радиоимпульсы р зоне считывания преобразуются в непрерывную последовательность эле1 трических управляющих мг«алов (iy(t}. Огибающая этих сигналов (на фиг. 2 показана пунктире) имеет сложную ,форму, которая в общем случае зависи от длительности импульсов опроса шин а также типа и цилиндрической катушки 18 съемника 12.
Основной особенностью огибаияцей управляющих сигналов ttj(t) является то, что дереход ее ноль Т9чно совпадает с центром катушки 18 съемника 12 (фиг. 2). Следовательно, и мёрить координату - это значит определить временное положение момента перехода огибактей через ноль,
Устройство, реализукядее способ, работает следуквдим образом.
В момент включения устройства начинает работать в автоколебательном режиме генератор 14, вырабатывая импульсную последовательность U(t) и на выходе делителя 15 частоты появляются импульсы U(t), управляющие токами опроса шин. Импульсы тока опроса вырабатывает блок 13 упрар.ления, который последовательно возбуждает шины в начале по одной, а затем и по другой координатным эсям. В результате над поверхностью планшета один за другим в двух орто гональных направлениях пробегают фр Ты радиоимпульсов, которым с помощ индукционной система съемника 12 пр дается форма, показанная на фиг.2 Чв|3€менная диаграмма Uj(t)). Получе ный на выходе съемника 12 сигнал ) усиливается высокочастотным усилителем 13 и поступает далее на фильтр 16, выделяющий сигнал огибаю щей управляющих импульсов Ugd). в результате на выходе этого фильтр появляется сигнал U.(t), переход через ноль которого при расположении съемника 12 в любой точке планшета 1 всегда связан с центром (ось катушкн 18. Временное положение момента пере хода волны и(t) через ноль определяется с помощью генератора 14 и соответствующего блока 4 или 5 определения координат .В момент време ни ty , соответствукмяий началу крординаты X, импульсом с блока 3 управ ления опрокидывается триггер бив счетчик 10 начинают поступать импул сы счета U-j (t) . Когда распространяю щаяся над планшетом в направлении оси X волна достигает съемника 12, выходе фильтра 16 появляется сигнал 4 при переходе через ноль которого на выходе порогового элемент 17 образуется перепад напряжения, возвращающий триггер 6 в исходное состояние (момент времени t на :фиг. 2). Поступление импульсов UjCt в счетчик 10 прекращается и в нем фиксируется координата X. Очевидно дискретность, с которой будет описываться координата в промежутках между шинами, определяется коэффициентом деления делителя 15 частоты. На фиг. 2 показан пример разбиения расстояния между шинами на 5 равных интервалов. По окончании опроса шин в направлении оси X начинается опрос шин в направлении оси У. При этом- импульсом с блока Э Управления орокидывается триггер 7, разрешающий поступление импульсов U,j(t) в счетчик 11. Когда же волна, распространяющаяся J3 направлении оси У, достигает съемника 12, на выходе фильтра 16 появляется второй сигнгш Ux(t)BO3вращаквций триггер 7 в исходное состояние. В счетчике 11 фиксируется координата У., Общий измерительный цикл заканчивается выдачей координат во внешнее устройство. После этого все процессы в устройстве повторяются. Предлагаеный способ позволяет реализовать устройства с непрерывным принципом действия. Это дает возможность квантовать координаты практически с любой днскретностью. Непрерывность измерения координат обеспечивается за счет преобразования дискретно перемещакмцегося от шины к шине поля в аналоговый сигнгш, являющийся непрерывной функцией времени. В результате задача определения координат сводится к преобразованию времени распространения в цифровой код. Причем скорость распространения волны задается разработчиком устоойства it зависит только от частоты опроса шин (в то время как, например, в устройствах с акустическим принципом съема координат она зависит от многих вшенних дефектов). Пусть требуется обеспечить разрешающую способность 25 мкм на рабочем поле 500x500 мм при шаге между шинами равном 5 мм. Примем, что шины уложены с более высокой точностью, чем 25 мкм, например 5 мкм. При этом точность измерения координат будет определяться главным образом температургаам коэффициентом расширения материгша планшета. Общее количество шин 200. Пусть требуется выдавать координаты со ско остью 100 изм/с. Опрос шин последовательный. Полное время опроса всех 200 шин составит, t : 10 мс, 100 изм частота опроса шин 20 кГц. Частота генератора импульсов счеf 4 МГц. 0,025 мм ш Скорость распространения волны о полк планшета 0,5м + 0,5 м 100 м/с Формула изобретения 1. Способ считывания графичес- v ой информации, основанный на разиении поля считывания на дискрете участки, формировании электромаг- йитного поля на каждом участке с помощь последовательности опрашивающих импульсов и преобразований электромагнитного поля в электрические импульсы, отличающийся тем что, с целью повышения точности счи-швания, выделяют сигнал огибающе электрических импульсов путем низкочастотвой фильтрации, фиксируют временной интервал от момента начала фсфмиррвания последовательности опР йВакщих импульсов до момента пере хода сигнала огибающей через нулевой уровень и по полученному временному интервалу судят 6 координате считыва емой точки. 2, Устройство для считывания .фической информации по п. 1, содержащее план111ет с системами взаимоортогонапьных координатных шин, соединен1шх с одними из выходов блока управления, другие выходы которого под ключены к одним из управляющих входов блоков определения координат, съемник информации, индуктивно связанный с координатными щи-ками:планшета и подключенный ко входу усилителя, генератор опргааившоадих импульсов, подключенный к счетиБил входам блока управ- ления, отличающееся тем, что, с целый повышения точности устройства, оно содержит последовательно соединенные фильтр низкой частоты и пороговый.элемент, «лход которого подключен к другим управляювцим входам блоков опЕределения координат, а выход Усилителя соединен с входом фильтра низкой частоты. Источники информации, принятые во внимание при экспертизе 1. Чеголйн т.н. и др. Автоматизация преобразования сложных форм графической кнформации. Минск, Наука и техника, 1973, Ci 46-53. З. Авторское свидетельство СССР I 402033, кл. G 06 К 11/00, 1973 {прототип).
19
JV
I i/. / 11 I 1 I I Ml 1 I I 111 I i I I l t| I I II11 11 I 11 /1111 till n |iil| hi I I I) I I I I I я1ш in tin i{r ji M ill 1,1 111 i


| название | год | авторы | номер документа |
|---|---|---|---|
| Способ считывания графической информации и устройство для его осуществления | 1980 |
|
SU982037A1 |
| Устройство для считывания графической информации | 1980 |
|
SU955133A1 |
| Устройство для считывания графической информации | 1981 |
|
SU1013989A1 |
| Устройство для считывания графической информации | 1983 |
|
SU1096669A1 |
| Устройство для считывания графической информации | 1987 |
|
SU1564661A1 |
| Устройство для считывания графической информации | 1981 |
|
SU966711A1 |
| Способ считывания графической информации | 1981 |
|
SU982038A1 |
| Устройство для считывания графической информации | 1982 |
|
SU1018136A1 |
| Устройство для считывания графической информации | 1980 |
|
SU894751A1 |
| Способ считывания графической информации и устройство для его осуществления | 1979 |
|
SU1119043A1 |

