1
Изобретение относится к противоаварийной автоматике энергосистем и предназначено для определения момента возникновения асинхронного хода генератора.
Известен ряд способов, выявления асинхронного хода, согласно которым момент его возникновения фиксируется при прохождении углом критического значения.
Наиболее близким по технической сущности к предлагаемому является способ, по которому для определения момента прохояздения критическопо угла измеряют величину синхронизирующей NwmHOCTH, угла электропередачи, а также его второй - третьей производной Ci.
Недостаток известного способа связан с необходимостью измерения угла. При наличии разветвленных электрических сетей TpyjpHO выполнить моделирование векторов напряжения точек электропередачи, расположенных по разные стороны от электрического центра качаний. Непосредственное измерение угла электропередачи требует применения сложной и дорогостоящей аппаратуры телепередачи фазы вектора
напряжения противоположного конца электропередачи.
Цель изобретения - упрридение опf ределения начала нарушения устойчивости в энергосистеме.
Поставленная цель достигается тем что в способе определения момента
4п возникновения асинхронного хода генератора путем измерения активной.мощности и определения синхронизирующей мсмцности генератора измеряют мощность приводного двигателя, величину синхронизирующей мощности определяют
по разности сигналов, пропорциональных квёщрату напряжения и реактивной мощности, выявляют знаки первой производной активной мощности генерато„. ра, второй производной синхронизирующей мощности и результата сравнения мощности генератора с мощностью приводного двигателя, и, если знак второй производной синхронизирующей мощности положительный, а знаки первой производной активной мощности генератора и результата сравнения мощности генератора с мощностью приводного двигателя отрицательны, фиксируют начало асинхронного хода с положительным скольжением.
Моменту -возникновения асинхроннЪго- хода соответствует одновременное выполнение следующих условий
.
dPr
; -g 0; р - р о
О
dt
«где Р - активная мощность генератора ;
PC синхронизирующая мощность; Р - мощность приводного двигателя Генератора,
Ве.г1ичина синхронизирующей мощности может быть измерена как разность сигналов, пропорциональных квадрату напряжения и реактивной мощности, пр этим выходной сигнализмерителя синхронизирующей мощности строго пропорционален величине измеряемой синхронизирующей мощности только при неизменйом составе линий электропередачи . Однако в предлагаемом способе используется информация не об абсолютном значении синхронизиругачей мощности, а только о второй ее производной, то можно не предъявлять осо.бых требований к точности измерения величины синхронизирующей мощности и в этом случае вполне допустимо измерять синхронизирующую мощность по разности сигналов, пропорциона.аьных квадрату напряжения и реактивной, мощности.
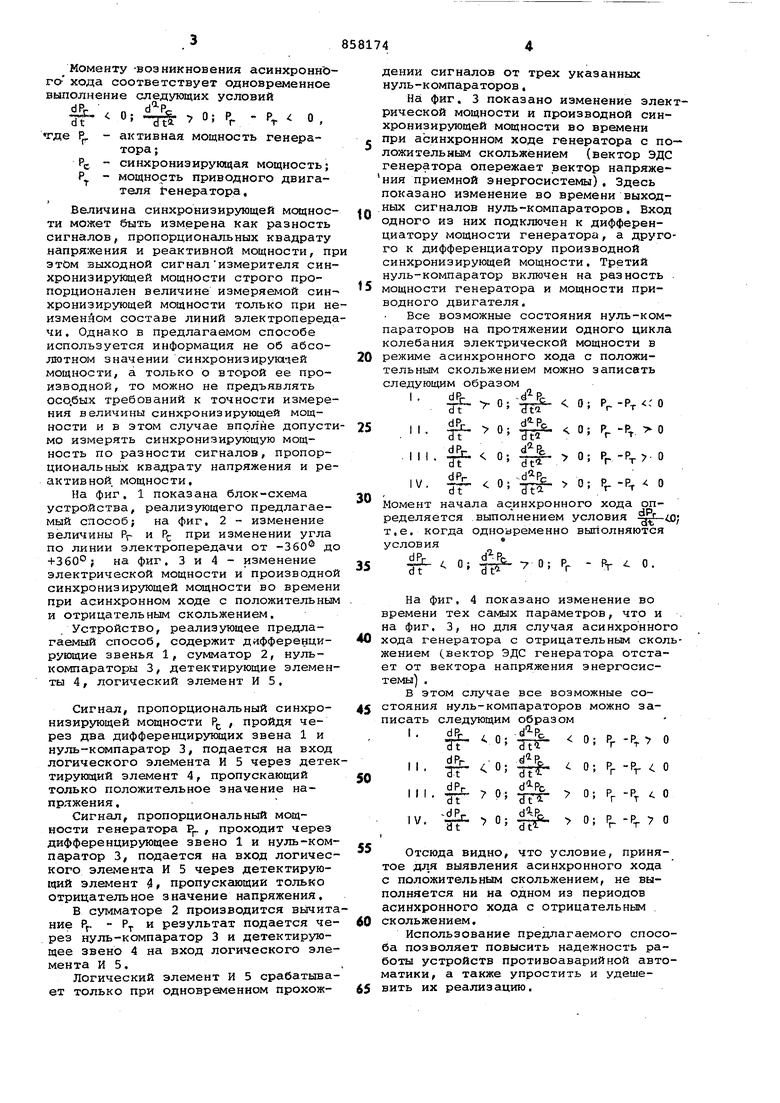
На фиг. 1 показана блок-схема устройства, реализующего предлагаемый способ; на фиг, 2 - изменение величины РГ и при изменении угла по линии электропередачи от -360 до +360°; на фиг. 3 и 4 - изменение электрической мощности и производной синхронизирующей мощности во времени при асинхронном ходе с положительным и отрицательным скольжением.
.Устройство, реализующее предлагаемый способ, содержит дифференцирующие звенья 1, сумматор 2, нулькомпараторы 3, детектирующие элементы 4, логический элемент И 5.
Сигнал, пропорциональный синхронизирующей мощности Рр , пройдя через два дифференцирующих звена 1 и нуль-компаратор 3, подается на вход логического элемента И 5 через детектирующий элемент 4, пропускающий только положительное значение напряжения.
Сигнал, пропорциональный мсадности генератора Рр , проходит через дифференцирующее звено 1 и нуль-компаратор 3, подается на вход логического эл€5мента И 5 через детектирую1аий элемент 4, пропускающий только отрицательное значение напряжения,
В сумматоре 2 производится вьгчитание Pf. - Р и результат подается через нуль-компаратор 3 и детектирующее звено 4 на вход логического элемента И 5.
Логический элемент И 5 срабатывает только при одновременном прохождении сигналов от трех указанных нуль-компараторов,
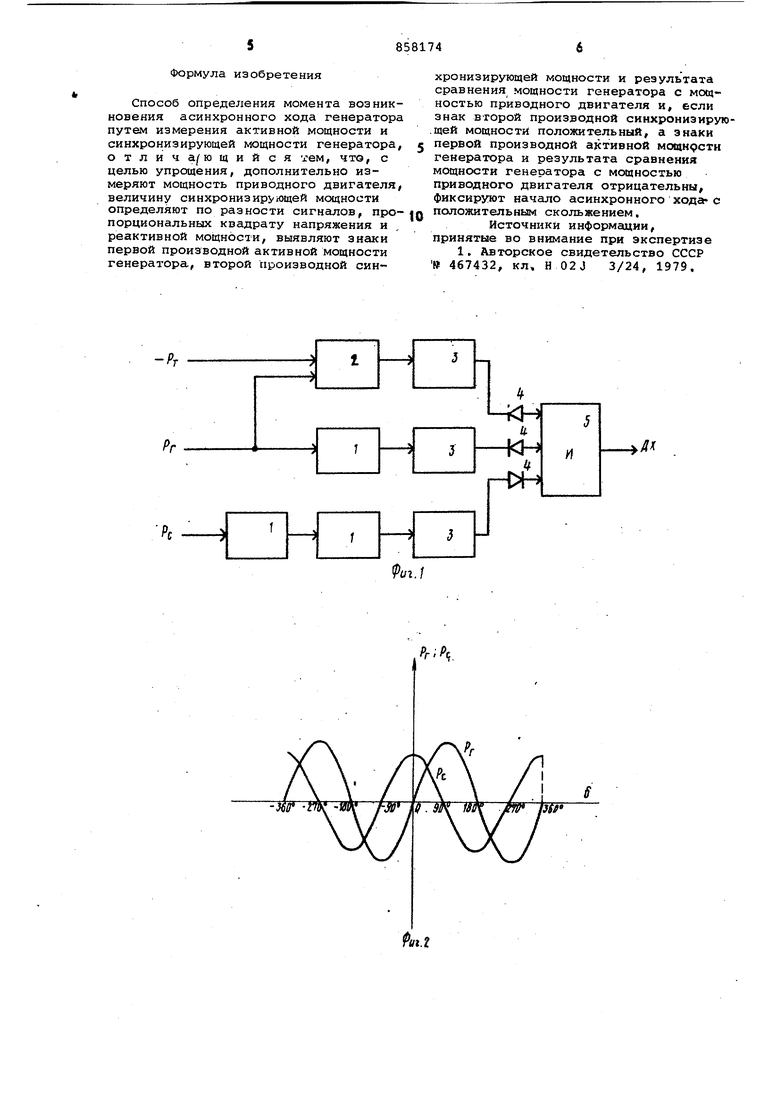
На фиг, 3 показано изменение электрической мощности и производной синхронизирующей мощности во времени при асинхронном ходе генератора с положительньм скольжением (вектор ЭДС генератора опережает вектор напряжения приемной энергосистемы), Здесь показано изменение во времени выходных сигналов нуль-компараторов, Вход одного из них подключен к дифференциатору мощности генератора, а другого к дифференциатору производной синхронизирующей мощности. Третий нуль-компаратор включен на разность . мощности генератора и мощности приводного двигателя.
Все возможные состояния нуль-компараторов на протяжении одного цикла колебания электрической мощности в режиме асинхронного хода с положительным скольжением можно записать следующим образом
-Й- 0 РГ-РТ О dPr . „
игг .. a гс.
0;
РГ -PT- 0
0;
p -p
I I
0 0;
T- T
.,
dPr
0;- 0;
РГ -P-r
0
IV.
dt
Момент начала ас инхронного хода определяется выполнением условия о/ т.е. когда одновременно выполняются условия
Лр
dt
0: 1 70;
- РГ 0.
i.
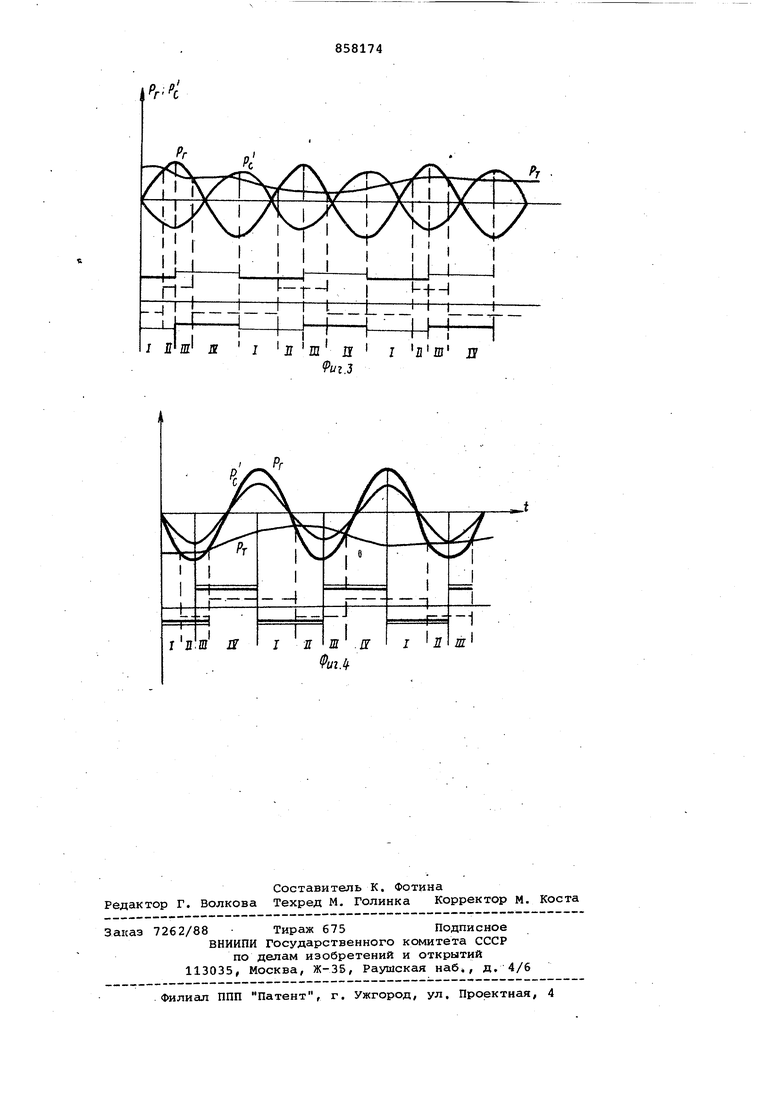
На фиг, 4 показано изменение во времени тех самых параметров, что и . на фиг, 3, но для случая асинхронного
0 хода генератора с отрицательным скольжением (вектор ЭДС генератора отстает от вектора напряжения энергосистемы) .
в этом случае все возможные соJ стояния нуль-компараторов можно записать следующим образом
0; 1 0; РГ-РГ о 1т- ° Г ° РГ -РГ о
dPr. 7 0; 0; Р, -Р, 4 О
I IV. - 0; 1 0; 7 О
Отсюда видно, что условие, принятое выявления асинхронного хода с положительным скольжением, не выполняется ни на одном из периодов асинхронного хода с отрицательным ,
скольжением.
Использование предлагаемого способа позволяет повысить надежность работы устройств противоаварийной автоматики, а также упростить и удешевить их реализацию.
Формула изобретения
Способ определения момента возникновения асинхронного хода генератора путем измерения активной мощности и синхронизирующей мощности генератора, отлича/ющийся тем, что, с целью упрощения, дополнительно измеряют мощность приводного двигателя, величину синхронизируизщей мощности определяют по разности сигналов, пропорциональных квадрату напряжения и реактивной мощности, выявляют знаки первой производной активной мощности генератора, второй производной синхронизирующей мощности и результата сравнения мощности генератора с мощностью приводного двигателя и, если знак второй производной синхронизиру.щей мощности положительный, а знаки первой производной активной мощнрстн генератора и результата сравнения мощности генератора с мощностью приводного двигателя отрицательны, фиксируют начало асинхронного хода-с положительным скольжением.
Источники информсщии, принятые во внимание при экспертизе
1, Авторское свидетельство СССР 467432, кл, Н 02J 3/24, 1979.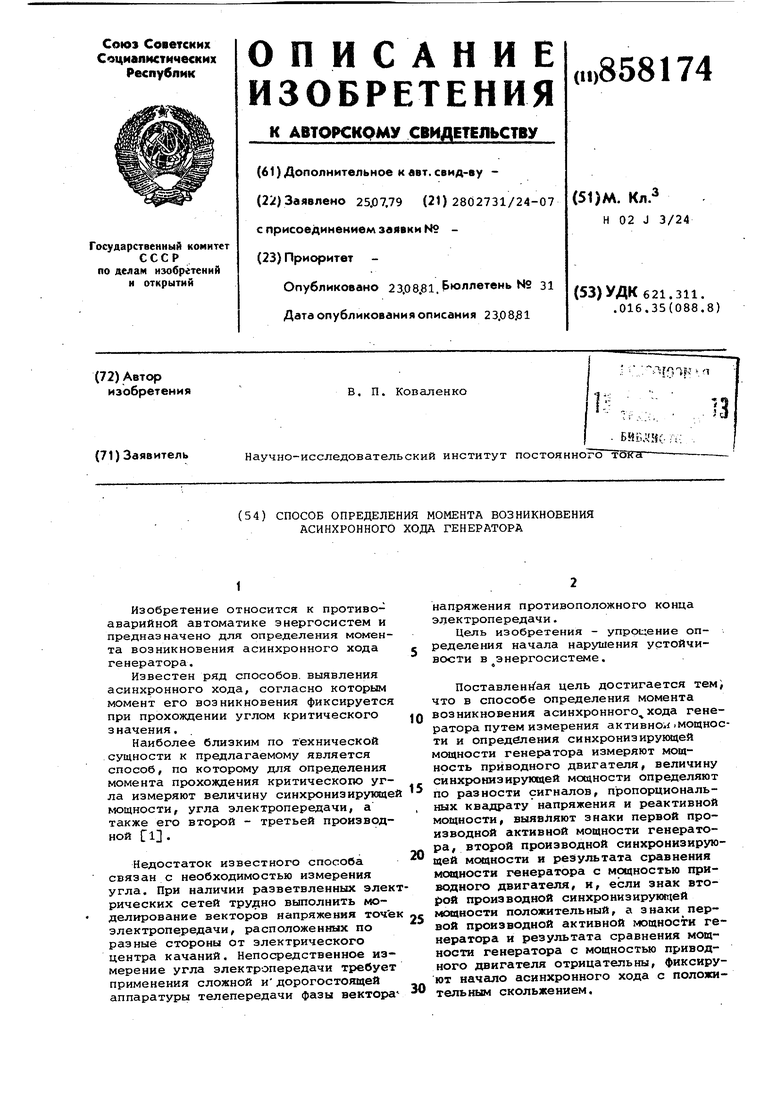
РГ
J(
fl-,
