Изобретение относится к медицинской технике, а именно к устройствам для изучения вестибулярного аппарата.
Известно устройство для определения работоспособности оператора по состоянию его вестибулярного аппарата, содержащего оптокинетический раздражитель, выполненный в виде бесконечной ленты с нанесенными на ней контрастными полосами, приводной механизм с электродвигателем, регулятор скорости движения оптокинетического раздражителя и регистратор 1.
Известное устройство представляет собой цилиндрическую кабину, на стенке которой нанесены контрастные полосы, например черно-белые, в центре установлено кресло. Кабина с по.1сйсами выполняет роль оптокинетического раздражителя.Вращая кабину (или кресло, у испытуемого вызывают состояние укачивания и по изменению функционального состояния организма судят о степени укачивания и о его влиянии на работоспособность человека. Самую большую группу вестибулярных реакций составляют вегетативные реакции. Для объективной регистрации изменений используют следующие методы клинического обследования: измерение пульса, кровяного давления, биохимических сдвигов в слюне, желудочном соке, изучают электрокардиограмму и электроэнцефалограмму и т.п. Выводу о состоянии вестибулярного аппарата делают на основании качественной оценки вышеуказанных характеристик, исследуя их отклонение от
10 нормы. Квалифицированно такая оценка может быть осуществлена только специалистами, имеющими соответствующую медицинскую подготовку. При этом :для проведения обследования и его
15 оценки требуется сложная техника и значительное время.
Таким образрм, известное устройство предназначено для использования в стационарных условиях и требует спе20циально оборудованного помещения для размещения кабины, кресла, сложной управляющей и регистрирующей аппаратуры, специально обученного обслуживающего персонала.
25
Цель изобретения - определение работоспособности оператора в процессе деятельности.
Поставленная цель достигается тем, что устройство для определения
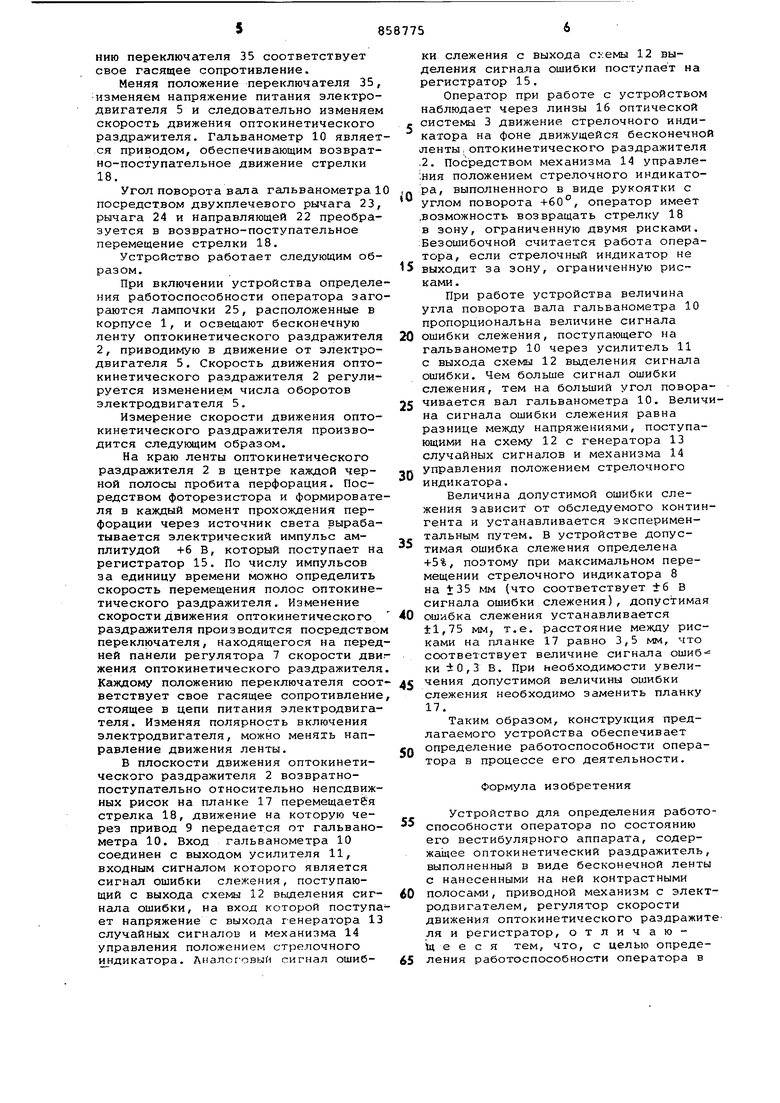
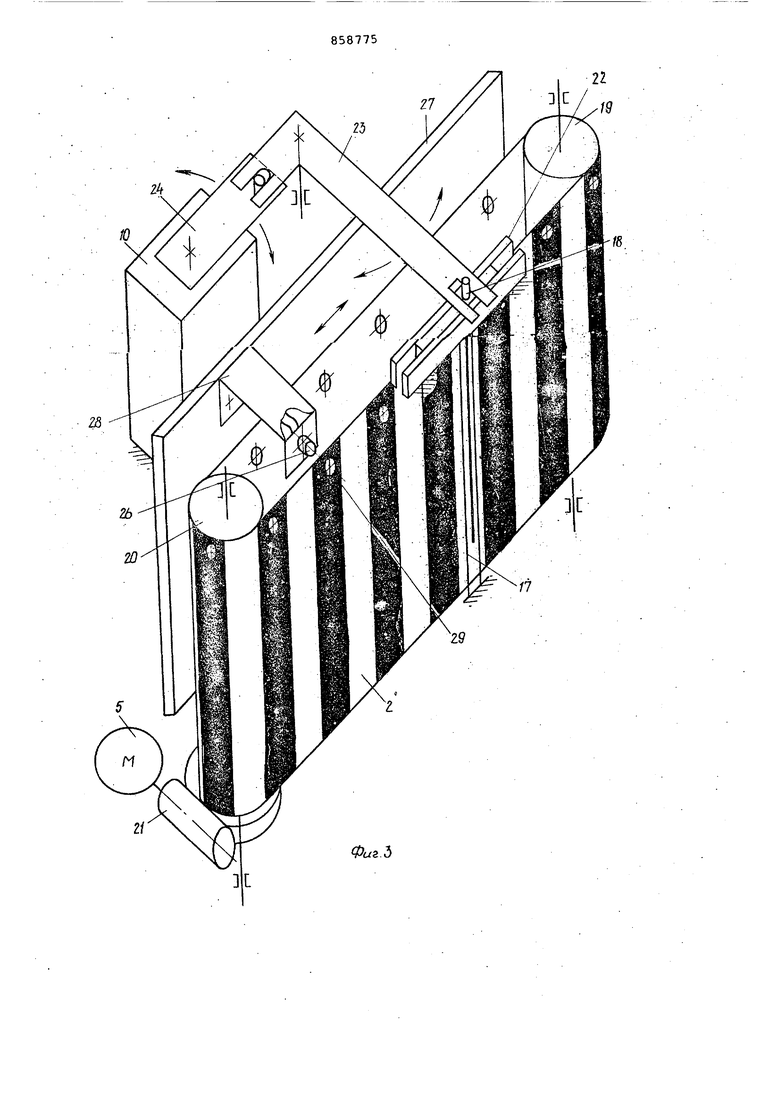
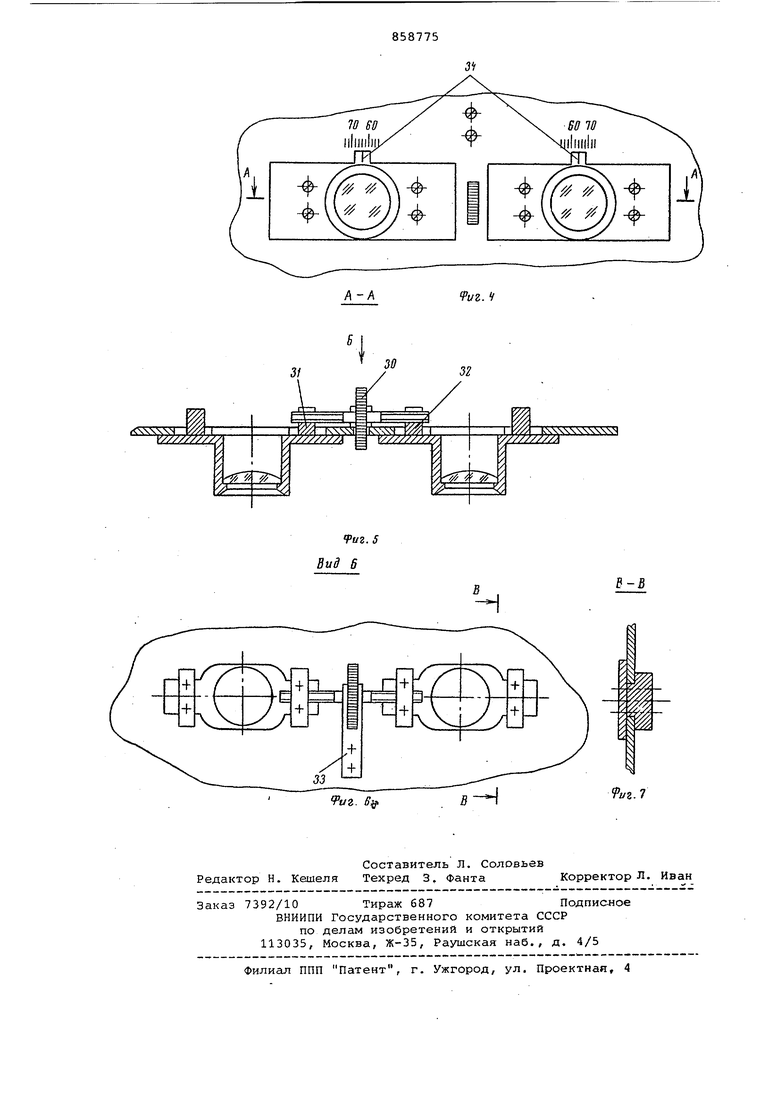
30 работоспособности оператора по соетоянию его вестибулярного аппарата, содержащее оптокинетический раздражи тель, выполненный в виде бесконечно ленты с нанесенными на ней контраст ными полосами, приводной механизм с электродвигателем, регулятор скорости движения оптокинетического ра дражителя и регистратор, снабжено светонепроницаемым корпусом с размещенными в нем источниками света и оптической системой,, включающей две линзы, установленные с возможностью изменения расстояния между ними, при этом регистратор содержит стрелочный индикатор с приводом его движения и механизмом управления его положением и геноратор случайных , соединенный с приводом движеiJi-iH индикатора через схему вьщеления сигнала ошибки, ко входу которой под ключен механизм управления положением индикатора, причем оптокинетически.и раздражитель установлен внутри корпуса в фокальной плоскости оптич Koi;. cHCieN-fci, а инд1- катор размещен фчг, J. изобршкепа структурная ;:;-: ь::; у;;:гройства для определения ):;::i6 У|Ч--:;;;(; сОб :ости оператора ; на фиг. 2 - устройство, общий вид о част -;чным сече; ием; на фиг, 3 - кин Mavi-piecKan с;хема устройства} на фкг. 4 -- лехапизм регулирования меж ueirrpoBoro расстояния линз; на фиг, 5 - сечение на фиг. на фиг. 7 фиг, б -- гзид Б на фиг, сечен - е U-B на фиг. 6. У р о ;{ с т 13 о с од е р жi-i т с в е т о н е и ро н и цаемый KOpiTyc 1 с источниками света в котором располагсгется оптокине- т и ч е с: к; i il р а з ,ц р а ж и т е ль 2 , о п т и ч е с к а я система 3, приводной механизм 4, связанный с электродвигателем 5, снабженный схемо 1 6 управления и г;ри}зодящий в двия;ение оптокинетический раздражитель 2, регулятор 7 скорости движения оптокинетического раздражителя 2. На фоне оптокинетического раздрг жи-теля 2 установлен стрелоч - ый индикатор 8, соединенный приво лом 9 с гальзанометром 10, являющимся нагрузкой ус - лителя 11. Уси.питель 11 подктпоч.ен к выходу схе г. 12 выделения скгна-ча ошибки, пер вый вхоя которой соединен с выходом renepfiTopia 13 случайных сигналов, а второй - с выходом мехгтнизма 14 управления положением стрелочного индикаГора 8, Усм-ройство оснащено регистг атором 15, соединенным со схемой 12 выделения сигнала ошибки и оптокинетическим раздражителем 2, Корпус 1 выполнен в виде камеры с мягким обратлопием для плотного при легания к лицу. На боковых стенках корпуса ук}::-сплены мягкие ремни для крепления к лицу. Оптическая система 3 включает две короткофокусные линзы 16 с НОСГОЯНН1-ЛМ фокусным расстоянием 68 мм и снабжена механизмом регулирования межцентрового расстояния. В фокальной плоскости оптической системы установлены оптокинетический раздражитель 2 и стрелочный индикатор 8. Оптокинетический раздражитель 2 выполнен в виде бесконечной ленты с нанесенными на ней контрастныгли полосами. Стрелочный индикатор 8 состоит из планки 17 с дисками и стрелки 18. Приводной механизм 4 содержит ведомый ролик 19 и ведущий ролик 20, соединенный посредством червяка 21 с электродвигателем 5, вход которого подсоединен к выходу схемы б управления электродвигателем. Привод 9 -включает направляющую 22, двухплечевой рычаг 23, рычаг 24, соединенный с выходом гальванометра 10. Лампочки 25 источника света (не менее двух) установлены внутри корпуса 1 перед наблюдаемым оператором участком ленты оптокинетического раздражителя 2 и расположены симметрично относительно оптической системы 3, что обеспечивает равномерность подсветки ленты. В устройстве фоторезистор 26 является датчиком формирователя импульсов скорости движения оптокинетического раздражителя 2. Формирователь выполнен по обычной схеме усилителя-ограничителя, собранного на плате 27, установленной внутри корпуса за лентой оптокинетического раздражителя 2. Фоторезистор укреплен на специальном кронштейне 28 и расположен за освещаемой лампочками 25 источника света лентой оптокинетического раздражителя 2 на уровне перфорации так,что при движении ленты отверстия 29, пробитые в центре каждой черной полосы, совпадают соосно с глазком фоторезистора 26. Регулировка межцентрового расстояния оптической системы 3 осуществляется при помощи.ходового винта 30, гайки 31 с левой резьбой, гайки 32 с правой резьбой и направляющей 33 при этом каждая гайка 31 и 32 жестко скреплена с корпусом одной из линз оптической системы 3. При вращении винта 30 гайки 31 и 32 перемещаются по нему либо к центру оптической системы 3, либо от центра, увлекая за собой линзы 16. Отсчет межцентрового расстояния осуществляется по риске 34. Переключатель 35 скорости движения оптокинетического раздражителя 2 расположен на правой боковой стенке корпуса 1 и является элементом регулятора 7 скорости движения оптокинетического раздражителя. Регулятор 7 установлен в корпусе 1 и содержит набор гасящих сопротивлений, включенный в цепь питания , электродвигателя 5. Каждому положениго переключателя 35 соответствует свое гасящее сопротивление.
Меняя положение переключателя 35, изменяем напряжение питания электродвигателя 5 и следовательно изменяем скорость движения оптокинетического раздражителя. Гальванометр 10 является приводом, обеспечивающим возвратно-поступательное движение стрелки 18.
Угол поворота вала гальванометра 1 посредством двухплечевого рычага 23, рычага 24 и направляющей 22 преобразуется в возвратно-поступательное перемещение стрелки 18.
Устройство работает следующим образом.
При включении устройства определения работоспособности оператора загораются лампочки 25, расположенные в корпусе 1, и освещают бесконечную ленту оптокинетического раздражителя 2, приводимую в движение от электродвигателя 5. Скорость движения оптокинетического раздражителя 2 регулируется изменением числа оборотов электродвигателя 5.
Измерение скорости движения оптокинетического раздражителя производится следукяцим образом.
На краю ленты оптокинетического раздражителя 2 в центре каждой черной полосы пробита перфорация. Посредством фоторезистора и формирователя в каждый момент прохождения перфорации через источник света вырабатывается электрический импульс амплитудой +6 В, который поступает на регистратор 15. По числу импульсов за единицу времени можно определить скорость перемещения полос оптокинетического раздражителя. Изменение скорости движения оптокинетического раздрс1жителя производится посредством переключателя, находящегося на передней панели регулятора 7 скорости движения оптокинетического раздражителя Каждому положению переключателя соот ветствует свое гасящее сопротивление стоящее в цепи питания электродвигателя. Изменяя полярность включения электродвигателя, можно менять направление движения ленты.
В плоскости движения оптокинетического раздражителя 2 возвратнопоступательно относительно неподвижных рисок на планке 17 перемещается стрелка 18, движение на которую через привод 9 передается от гальванометра 10. Вход гальванометра 10 соединен с выходом усилителя 11, входным сигналом которого является сигнал ошибки слежения, поступающий с выхода схемы 12 вьщеления сигнала ошибки, на вход которой поступает напряжение с выхода генератора 13 случайных сигналов и механизма 14 управления положением стрелочного ждикатора. Ляалоговын сигнал ошибки слежения с выхода 12 выделения сигнала ошибки поступает на регистратор 15.
Оператор при работе с устройством наблюдает через линзы 16 оптической системы 3 движение стрелочного индикатора на фоне движущейся бесконечной ленты;оптокинетического раздражителя .2. Посредством механизма 14 управле,ния положением стрелочного индикатора, выполненного в виде рукоятки с
О углом поворота +60°, оператор имеет .возможность возвращать стрелку 18 в зону, ограниченную двумя рисками. :Безошибочной считается работа оператора, если стрелочный индикатор не
5 выходит за зону, ограниченную рисками.
При работе устройства величина угла поворота вала гальванометра 10 пропорциональна величине сигнала
0 ошибки слежения, поступающего на гальванометр 10 через усилитель 11 с выхода схемы 12 выделения сигнала ошибки. Чем больше сигнал ошибки слежения, тем на больший угол поворачивается вал гальванометра 10. Величи5на сигнала ошибки слежения равна разнице между напряжениями, поступающими на схему 12 с генератора 13 случайных сигналов и механизма 14 управления положением стрелочного
0 индикатора.
Величина допустимой ошибки слежения зависит от обследуемого контингента и устанавливается экспериментальным путем. В устройстве допус5тимая ошибка слежения определена +5%, поэтому при максимальном перемещении стрелочного индикатора 8 на t35 мм (что соответствует ±6 В сигнала ошибки слежения), допустимая
0 ошибка слежения устанавливается ±1,75 мм, т.е. расстояние между рисками на планке 17 равно 3,5 мм, что соответствует величине сигнала ошиб- ки iO,3 В. При необходимости увеличения допустимой величины ошибки
5 слежения необходимо заменить планку 17.
Таким образом, конструкция предлагаемого устройства обеспечивает определение работоспособности опера0тора в процессе его деятельности.
Формула изобретения
Устройство для определения работо5способности оператора по состоянию его вестибулярного аппарата, содержащее оптокинетический раздражитель, выполненный в виде бесконечной ленты с нанесенными на ней контрастными
0 полосами, приводной механизм с электродвигателем, регулятор скорости движения оптокинетического раздражителя и регистратор, отличаю1д е е с я тем, что, с целью опреде5ления работоспособности оператора в
процессе деятельности, оно снабжено светонепроницаемым корпусом с размещенными в нем источниками света и оптической системой, включающей две линзы, установленные с возможностью изменения расстояния между ними, при этом регистратор содержит стрелочный индикатор с приводом его движения и механизмом управления его положением и генератор случайных чисел, соединенный с приводом движения индикатора через схему выделения сигнала ошибки, ко входу которой подключен механизм управления положением индикатора, причем оптокинетический раздражитель установлен внутри корпуса в фокальной плоскости оптической системы, а индикатор раз. мещен перед ним.
Источники информации, принятые во внимание при экспертизе 1. Actual Examination of nystagmus bu, means of ENG (e I ect ronys tagmography).-San . Instr. Co. Ltd., Япония.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИССЛЕДОВАНИЯ ВЕСТИБУЛЯРНОГО АНАЛИЗАТОРА В УСЛОВИЯХ МОДЕЛИРУЕМОЙ НЕВЕСОМОСТИ | 1997 |
|
RU2114772C1 |
| Способ исследования фузионной способности и устройство для его осуществления | 1981 |
|
SU1114415A1 |
| КОМПЬЮТЕРНЫЙ СПОСОБ КОМПЛЕКСНОЙ ОЦЕНКИ СОСТОЯНИЯ ВЕСТИБУЛЯРНОЙ ФУНКЦИИ, МЕЖСЕНСОРНЫХ ВЗАИМОДЕЙСТВИЙ И СЛЕДЯЩЕЙ ФУНКЦИИ ГЛАЗ | 2005 |
|
RU2307575C2 |
| Устройство для неадекватного раздражения вестибулярного анализатора | 1990 |
|
SU1734691A1 |
| Имитатор бимодального слежения | 1983 |
|
SU1123641A1 |
| КОРАБЕЛЬНАЯ ОПТИЧЕСКАЯ СИСТЕМА ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1993 |
|
RU2083443C1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ УСЛОВИЙ НЕВЕСОМОСТИ | 1993 |
|
RU2072955C1 |
| УСТРОЙСТВО ДЛЯ СТИМУЛЯЦИИ ОПТОКИНЕТИЧЕСКОГО НИСТАГМА | 1992 |
|
RU2044514C1 |
| Система слежения гелиоустановки | 1983 |
|
SU1135973A1 |
| Способ определения функционального состояния окуломоторной системы | 1986 |
|
SU1454374A1 |
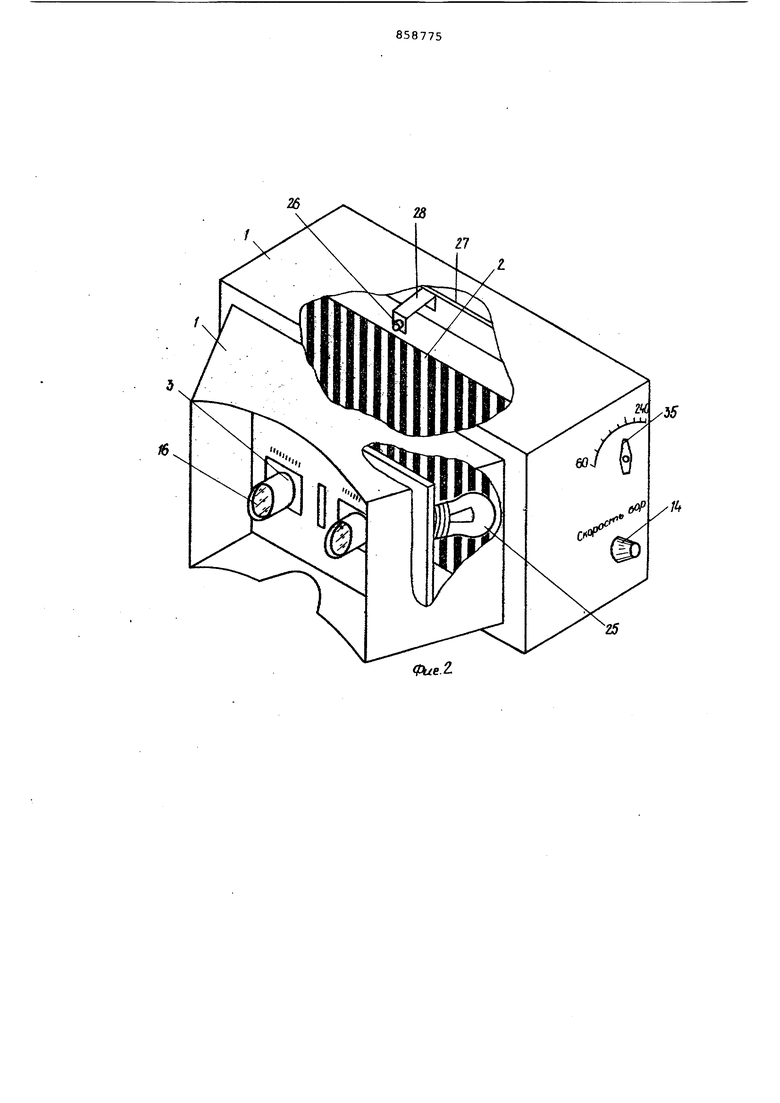
Фие.2.
Фиг 5
3t
32
