(54) УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СКОРОСТИ ДВИЖЕНИЯ ОЗЬЕКТА
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения скорости движения объекта | 1981 |
|
SU953569A1 |
| СТАБИЛИЗИРОВАННОЕ ТЕПЛОВИЗИОННОЕ УСТРОЙСТВО НАВЕДЕНИЯ | 1995 |
|
RU2099750C1 |
| Устройство для измерения скорости движения объекта | 1983 |
|
SU1118919A1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ПРОДОЛЬНЫХ И ПОПЕРЕЧНЫХ СМЕЩЕНИЙ | 1992 |
|
RU2054626C1 |
| Датчик скорости | 1975 |
|
SU532816A1 |
| Устройство для измерения расстояний | 1983 |
|
SU1094009A1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ МНОГОГРАННОГО ЗЕРКАЛЬНОГО СКАНЕРА | 1994 |
|
RU2080636C1 |
| ИНФРАКРАСНОЕ ЛАЗЕРНОЕ СКАНИРУЮЩЕЕ УСТРОЙСТВО | 1987 |
|
RU2027202C1 |
| Устройство для считывания и обработки изображений объектов /его варианты/ | 1984 |
|
SU1280409A1 |
| ИРИДОТРОН | 1989 |
|
RU2019125C1 |
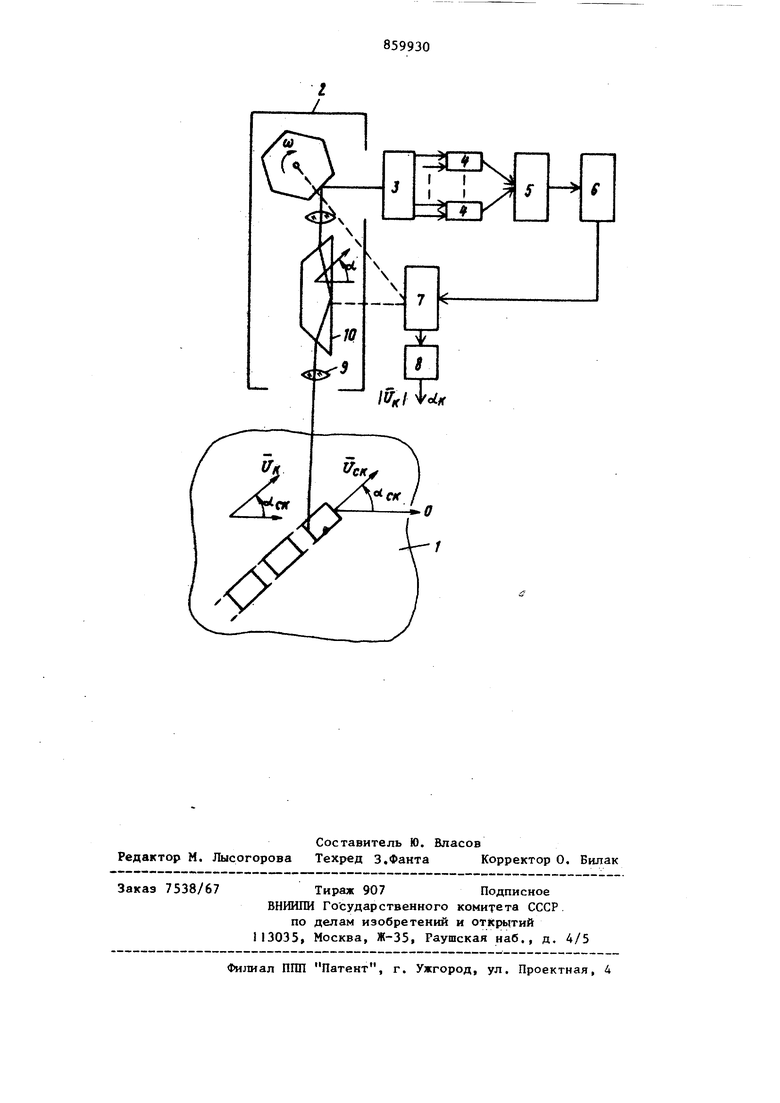
ИзобретенИ относится к приборостроению и может быть использовано для бесконтактного измерения вектора скорости движения относительно протяженных объектов со слабо выраженными оптическими неоднородностями поверхности. Известен бесконтактный измеритепь скорости движения, в котором перемеще ние изображения оптических неоднородностей преобразуется на выходе фотоприемника в частоту переменной составляют5ей напряжения, характеризующую скорость l . Известное устройство не может быть использовано для измерения вектора скорости при произвольном изменении направления искомого вектора скорости от О до 360. Известно ; устройство, содержащее сканер, выполненный в виде многогранной призмы, привод сканера, фотоприемник, экстремалыв)1й регулятор, выход которого соединен с приводом сканера. регистратор, соединенный с приводом сканера 2 . Известное устройство работает только в случаях, когда направление перемещения контролируемого объекта принимает лишь два значения - О ипи 180 и неработоспособно при произвольном изменении-направления искомого вектора скорости от О до 360°. Цель изобретения - получение возмо жности измерения вектора скорости сложного движения при произвольном изменении направления движения и повышение точности. Для достижения поставленной .цели в устройство введены система изменения направления сканирования, исполненная в виде последовательно установленных объектива и призмы Лове, оптически связанных с исследуемым объектом и многогранной призмой, при этом призма Дове выполнена с возможностью углового смещения и механически соединена с приводом сканера, а также . введены элементы сравнения и фильтр переменной составляющей, а фотоприемник выполне в внде фотоматрицы с параллельным считыванием, при этом выходы фотоматриц соединены с входами элементов сравнения, вход фильтра переменной составляющей соединен с выходами элементов сравнения, а его выход соединен со входом экстремального регулятора. На чертеже изображена структурная схема предлагаемого устройства. Изображение поверхности 1 сканером 2, составляющем из зеркального многогранника и -системы изменения направления сканирования, проектируется на фотоматрицу 3, каждый фотопреобразователь которой имеет собственный выход. Выходы фотоматрицы 3 соединены с входами элементов 4 сравнения. Выходы элементов 4 сравнения соединены с входами фильтра 5 переменной составляющей. Выход фильтра 5 переменной составляющей соединен с входом экстремального регулятора 6, Выход экстремального регулятора 6 соединен с входом привода сканера 7. Привод 7 сканера соединен с зеркальным многогранником и системой изменения направ ления сканирования скадера 2. Регистратор 8 соединен с приводом 7 -Сканера. Система изменения направления сканирования представляет собой объектив 9. содержащий призму Дове 10. Устройство работает следующим образом. Сканер 2 с помощью зеркального мно гогранника осуществляет перемещение поля зрения устройства на поверхности 1. Скорость сканирования по абсолютной величине задается угловой скоростью вращения (ij зеркального многогранника сканера 2. Направление сканирования задается углом поворота с( призмы Дове 10 вокруг визирной оси При повороте призмы Дове от О до 180 направление сканирования изменяется от О до ., Таким образом, если угол поворота призмы Дове - cL , то направление сканирования 2с( Результирующая скорость перемещения изображения на плоскости ф томатрицы 3 равна 7 V - 4 , где V - иско й.Iй вектор относительной скорости кон тролируемой поверхности 1. Если (V) О, то оптические неоднородности поверхности 1 поочередно изменяют освещенность элементов фотоматрицы 3. На 04 входе фильтра 5 переменной составляющей частота переменной составляющей напряжения F - ), где m - коэффициедт пропорциональности. Еати О, ск к F о. Очевидно, что при. F - О происходит совмещение вектора скорости сканирования i с искомым вектором V.,; Чтобы частота переменной составляющей напряжения F на входе фильтра 5 1еременной составляющей зависела только от скорости изображения на плоскости фотоматрицы 3 V, выходы фотопреобразователей фотоматрицы 3 соединены с входами элементов 4 сравнения. Элемент 4 сравнения представляет собой дифференг иональный усилитель, на входы которого подается напряжение с выхода двух соседних фотопреобразователей фотоматрицы 3. Напряжение на выходе дифференциального усилителя 4 Уд K() , где и и и - напряжения на выходе двух соседних фотопреобразователей фотоматрицы 3; К - коэффициент усилителя. При вращении зеркального многогранника сканера 2 возникает периодическая модуляция общей освещенности фотоматрицы 3, что вызывает изменение напряжения на выходе фотопреобразователей на величину ли. Напряжение на выходе элемента 4 сравнения при этом не изменяется, так как U4 К(и -KAU)-(U2 + ди) К X X (и (ij). При перемещении изображения на плоскости фотоматрицы 3, то есть при (V) О, изменяется .-поочередно освещенность соседних фотопреобразователей фотоматрицы 3, в результате чего при (V) О на выходе элементов 4 сравнения имеется переменная составлякнцая напряжения. Фильтр 5 переменной составляющей пропускает переменную составляющую напряжения на вход экстремального регулятора 6. Коэффициент передачи R(F) фильтра 5 имеет прямую зависимость от частоты переменной составляющей напряжения, то есть R(F) К F, где К - коэффициент пропорциональности. Экстремальный регулятор 6 через привод 7 сканера изменяет вектор сканирования таким образом, чтобы частота переменной составляющей напряжения Vf. при этом Vf.- V . Таким образом, экстремальный регулятор 6 осуществляет минимизацию частоты на входе фильтра 5. Минимизация частоты переменной составляющей может осуществляться тактированием управляющего воздействия на
сканер 2. Сначала минимизируется частота , изменяя угловую скорость uJ зеркального многогранника, после чего минимизация частоты осуществляется путем совмещения направления сканирования яаправлением перемещения контролируемой поверхности 1сз.к« В результате минимизации частоты F достигается равенство векторов V( V Регистратор 8, регистрируя значения СК и . однов еменно регистрирует искомую скорость (VK) и направление otjtконтролируемой поверхности I, так как при F О, /(.ц Vj.
Формула изобретения
. Устройство для измерения скорости движения объекта, содержащее сканер, выполненный в виде многогранной призьл, привод сканера, фотоприемник, экстремальный регулятор, выход которого соединен с приводом сканера, отличающееся тем, что, с целью определения вектора скорости при произвольном изменении направления движе1а1Я и повышения точности измерений, а него введена система изменения направления сканирования, выполненная в виде последовательно установленшях объектива и призмы Дове, опти чески связанные с исследуемым обьек- . том и многогранной призмой, при этом призма Дове выполнена с возможностью углового смещения и механически соединена с приводом сканера,
Источники информации, принятые во внимание при экспертизе
