...:- . .
Изобретение Огносится к фазовым AajiibifOiiepHbM радионавигационным системам и может использоваться для уп равлея11в пО|движны в1 объектами при 90Цденки их по заданным траекторюш.
ocHOBiKHny авт. св. 819767 иэаестна дгшьнОмерная система с измерением разности фаз на частоте модуляции, содвржакая бортовую приемнопередамцую станцию, включаюшую приёмно передаздую антенну, передатчик, приемник, состояадий из преобразователя и усилителя-ограничителя, генератор частоты, индикатор отклонения, делитель частоты, блок переменной згщержки и блок статистическоЛ обработки достоверных сигналов, и наземную приемно- передаюиую станцию Jl}.
Однако помехоустойчивость известной дгльномер ной систеьш недостаточна. , -,
Цель изобретения - повышение помехоустойчивости системы.
Указанная цель достигается тем, что в дальномерной системе с измерением разности фаз на частоте модуляции, содержашей бортовую приемноперевдаицую станцию, включающую приемно-передащую антенну, передатчик.
приемник, состоящий из преобразователя и усилителя-ограничителя, генератор опорной частоты, индикатор отклонения, делитель частоти, блок переменной задержки и блок статистической обработки достоверных сигналов, и наземную приемно-передающую станцию, в бортовую приемно-передаю«цую станцию введен Цифровой фильтр,
to один из входов которого соединен с генератором опорной частоты, другой вход - с преобразователем приемника, а выход - с усилителем-ограничителем приемника.
15
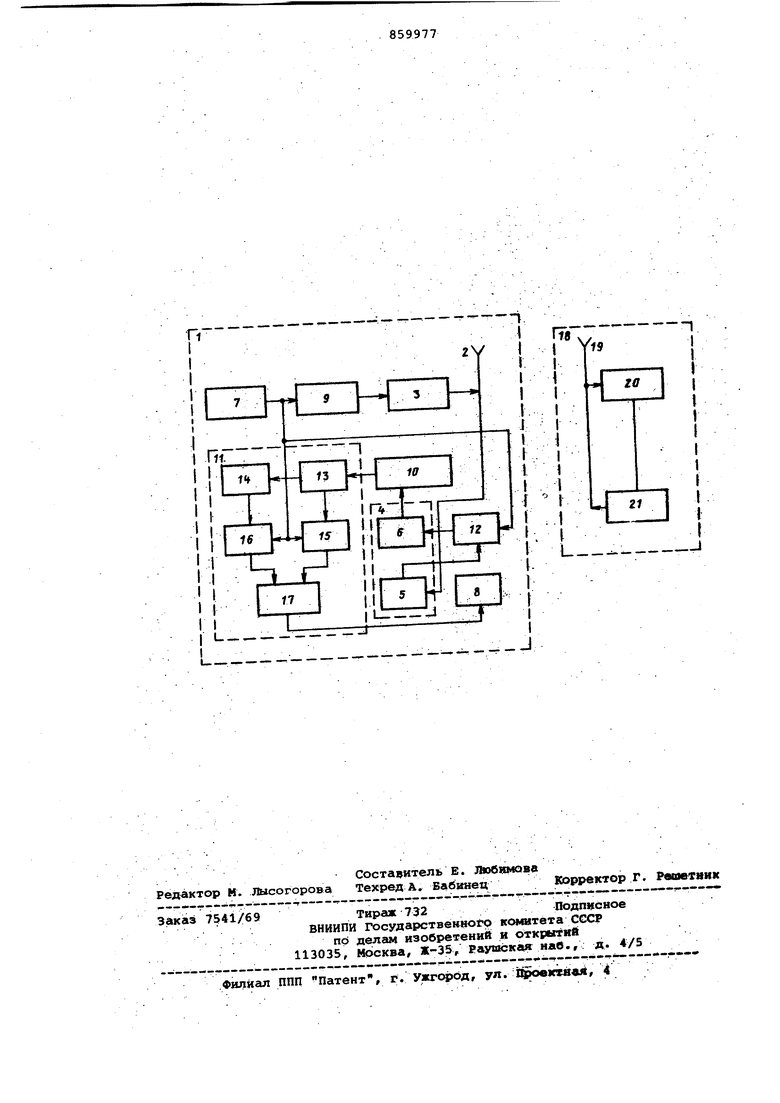
На чертеже представлена структурная электрическая схема предлагаемой дальномерной систе.
Дальномерная система с измерением разности фаз на частоте модуляции 20 содержит бортовую приемно-передающую станцию 1, включающую пряемно-передакхцую антенну 2, передатчик 3, приемник 4, состоящий из преобразователя S и усилителя-ограничителя б, ге25нератор 7 опорной частоты, индикатор 8 отклонения, делитель 9 частоты, блок 10 переменной згщержки и блок 11 статистической обработки достоверных сигналов, цифровой фильтр
30 12, один КЗ входов которого соединен с генератором 7 опорной -частоты,другой вход - с преобразователем 5 приемника 4, а выход - с усилителем-огра ничителем б приемника 4. Блок 11 статистической Обработки.достоверных сигнало выполнен в виде двух формирователей 1з и 14 импульсов, двух схем 15 и 16 совпадения и усредняющего дифференциально-разностного звена 17, кроме того, дальномерная система содержит наземную приемо-передающую станцию 18, состоящую из приемно.-передающей антейны 19, приемника 20 и передатчика 21. Система работает, следующим образом. На модуляционный вход передатчи ка 3 поступают импульсы с генератора 7 через делитель 9 частоты. Частота импульсов соответствует модуляционной частоте. .Из иМпульсов опорной частоты в передатчике 3 эырабатывается синусоидальный сигнал, которым модулируют ся собственные высокочастотные колебания. Модулированные высокочастотные йолебания излучаются приемо-передающей антенной 2 и через приемно-передающую антенну 19 наземной примнопередающей станции 18 поступают на вход приемника 20. В пр иемнике 20 вы деляется частота модуляции. С помощь этой частоты модулируются .собственные высокочастотные колебания передатчика 21, частота которого отличаё.тся от частоты передатчика 3. Модулированное высокочастотные ко лебания, излучаемые приемно-передающёй антенной 19, принимаются приемно передающей антенной 2 и поступают на вход преобразователя 5, в котором .выделяется частота модуляции и посту пает на вход цифрового фильтра. 12, на второй вход которого подаются импульсы с генератора 7. Сигнал модуля ционной частоты подвергается цифровым фильтром 12 нецреЕЯЛвному квантованию. На выходе цифрового фильтра 1 появляется квантованный вариант вход ного сигнала в случае совпадения его рабочей частоты и частоты .входного :сигнала, .т.е. появляется только сигнал с частотой модуляции. Далее сигнал с модуляционной частотой поступает и.а усилитель-ограничитель 6, на выходе которого появляется опорный импульс в момент перехода входного сигнала через нулевую линию Опорный импульс поступает на .вход блока Ю. БЛОКОМ 10 осуществляется сдвиг им- пульса в пределах длительности перио да следования импульсов генератора 7 Передним фронтом выходного импуль са блока 10 запускается формирователь 13, длительность выходного импульса которого ра.вна длительности импульса генератора 7 Этот импульс поступает на входы схемы 15 сов.падений и второго формирователя 14, который запуска ется по заднему фронту входного импульса. йлходной сигнал с усредняющего дифференциально-разностного звена 17 поступает на вход индикатора 8. Б момент калибровки с помощью блока 10 совмеща отся стробимпульсы с формирователей 13 и 14 с одним из ближайших по временному положению импульсов генератора 7. в этом случае со схем 15 и 16 совпадений на интегрирующие цепи (не показаны) усредняющего дифференциально-разностного звена 17 поступают импульсы. Равенство по длительности выходных импульсов со схем 15 и 16 совпадений наступает лишь в момент.половинного перекрытия импульсов генератора 7 с импульсами формирователей 13 и 14, что соответствует равенству входных напряжений на интегрирувздих цепях усредняющего дифференциально-разностного звена 17, на выходе которого автоматически устанавливается условный нуль. Это соответствует выбранной трассе перемещения. При наличии отклонения полвижного объекта от заданной трассы во вр1еменном интервале сдвигается пара стробИмпульсов с формирователей 13 и 14., нарушается равенство длительности выходных импульсов со схем 15 и 16 совпадения, а следовательно, на выходе блока 11 появляется информация о величине и направлении отклонения подвижного объекта от заданной трассы. Предлагаемая система повышает точность управления подвижным объектом при вождении его по эквидистантнь1м трассам -В зонах, насыщенных радиотехническими средствами навигации. Формула изобретения Дальномерная система с измерением разности фаз на частоте модуляции по авт. св. № 819767, о т.л и ч а ю щ а Я с я ТИМ, что, с целью повышений помехоустойчивости, в бортовую прйемно пJpeдaraцyю станцию введен . цифровой фильтр, один из входов которого соединен с генератором опорной частоты, другой вход - с преобраэоватгелем приемника, а выход - с усилитeлeм-t гpaничиteлeм приемника. Источники информации, принятые во внимание при экспертизе 1. свидетельство СССР 8197б7 кл. G 01 S 1/32, 31.03.76.
| название | год | авторы | номер документа |
|---|---|---|---|
| Дальномерная система с измерениемРАзНОСТи фАз HA чАСТОТЕ МОдуляции | 1976 |
|
SU819767A1 |
| Дальномерная система с измерением разности фаз на частоте модуляции | 1976 |
|
SU949570A2 |
| УГЛОМЕСТНО-ВРЕМЕННОЙ ДОПЛЕРОВСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ АВАРИЙНОГО ОБЪЕКТА | 2006 |
|
RU2305057C1 |
| ФАЗОВАЯ РАДИОГЕОДЕЗИЧЕСКАЯ СИСТЕМА | 1991 |
|
RU2088948C1 |
| МЕТКА РАДИОЧАСТОТНОЙ ИДЕНТИФИКАЦИИ ОБЪЕКТА И СИСТЕМА И СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ И КОНТРОЛЯ ОБЪЕКТОВ | 2007 |
|
RU2371734C2 |
| РАДИОДАЛЬНОМЕР | 2000 |
|
RU2197000C2 |
| Бортовая радиолокационная станция дистанционно управляемого летательного аппарата | 2017 |
|
RU2668995C1 |
| УГЛОМЕСТНО-ВРЕМЕННОЙ ДОПЛЕРОВСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ АВАРИЙНОГО ОБЪЕКТА | 2006 |
|
RU2329921C2 |
| СПОСОБ РАДИОНАВИГАЦИОННЫХ ИЗМЕРЕНИЙ В ИМПУЛЬСНО-ФАЗОВОЙ РАДИОНАВИГАЦИОННОЙ СИСТЕМЕ | 1997 |
|
RU2115937C1 |
| РАДИОДАЛЬНОМЕР | 2000 |
|
RU2197001C2 |