Предлагаемый способ относится к космической технике и может быть использован на космических аппаратах, находящихся на орбите искусственного спутника Земли, кроме геостационарной, стабилизируемых вращением вдоль вертикальной оси.
Известны способы и системы определения координат аварийного объекта (патенты РФ №№2.155.352, 2.158.003, 2.040.860, 2.59.423, 2.174.092, 2.193.990, 2.201.601, 2.206.902, 2.226.479, 2.240.950; патенты США №№4.161.730, 4.646.090, 4.947.177; Скубко Р.А. и др. Спутник у штурвала. - Л.: Судостроение, 1989. - 168 с. и другие).
Из известных способов и систем наиболее близким к предлагаемому является "Угломестно-временной доплеровский способ определения координат аварийного объекта" (патент РФ №2.174.092, В64G 1/10, 1999), который и выбран в качестве прототипа.
Согласно известному способу производят поиск такого пространственного положения приемной антенны спутника при наличии факта работы передатчика аварийного объекта, когда частота Доплера принимаемого сигнала равна нулю. В этот момент измеряют угол между осью приемной антенны и осью датчика горизонта. Координаты подспутниковой точки трассы космического аппарата в момент измерения вычисляются. Измерения проводят два раза. По координатам двух подспутниковых точек и двум измерениям указанного угла определяют местоположение аварийного объекта.
Известный способ обеспечивает однозначное определение и повышение точности вычисления координат аварийного объекта, находящегося на поверхности Земли, а также расширение площади просматриваемой поверхности и увеличение отношения сигнал/шум в приемной радиолинии.
Для реализации известного способа на аварийном объекте размещается передатчик сигналов, обладающий высокой стабильностью частоты. На борту космического аппарата (КА) размещается измерительное устройство, имеющее в своем составе высокостабильный эталон частоты, частота которого равна частоте аварийного передатчика или отличается от нее на строго фиксированную величину. Сравнение частот принимаемых колебаний с частотой эталона позволяет установить величину доплеровского смещения частоты и по нему определить скорость.
Однако при этом необходимо обеспечить весьма высокую стабильность частоты передатчика и эталонного генератора.
Действительно, только для того, чтобы заметить доплеровское изменение частоты, возникающее при движении КА со скоростью V, необходимо обеспечить относительную нестабильность частоты излучаемого колебания не ниже чем

где c - скорость распространения радиоволн.
При условии, что V=8 км/с, имеем
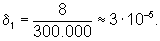
Если же требуется не только заменить доплеровское смещение частоты, но и измерить модуль скорости с погрешностью ΔV, то нестабильность частоты должна быть еще значительно снижена, а именно по крайней мере в (V/ΔV) раз. Общая нестабильность частоты излучаемых колебаний δ должна составлять

Таким образом, для измерения малых значений доплеровской частоты Fд и фиксации ее нулевого значения при прохождении КА точки траверза стабильность частоты передатчика аварийного объекта должна быть весьма высокой. Это обстоятельство и является недостатком известного способа и препятствием на пути широкого использования беззапросного метода измерения доплеровской частоты.
Технической задачей изобретения является повышение точности измерения малых значений доплеровской частоты и фиксации ее нулевого значения путем предварительного понижения частоты принимаемых колебаний с помощью гетеродинирования в двух каналах обработки.
Поставленная задача решается тем, что согласно угломестно-временному доплеровскому способу определения координат аварийного объекта, находящегося на поверхности Земли с помощью космического аппарата, стабилизированного вращением вдоль вертикальной оси, заключающемуся в том, что при появлении сигнала передатчика аварийного объекта на просматриваемой с космического аппарата полосе на поверхности Земли измеряют частоту Доплера беззапросным методом, находят пространственное положение космического аппарата в момент, когда частота Доплера принимаемого сигнала равна нулю, измеряют в этот момент времени угол между механической осью приемной антенны космического аппарата и осью датчика горизонта с привязкой измерения к бортовому времени, вычисляют координаты подспутниковой точки в момент указанного измерения, при этом измерения проводят два раза и по координатам двух подспутниковых точек и двум измерениям угла между механической осью приемной антенны космического аппарата и осью датчика горизонта определяют местонахождение аварийного объекта на поверхности Земли, для измерения частоты Доплера беззапросным методом используют два канала обработки, в которых принимают сигнал, преобразуют по частоте с использованием задающего генератора, при этом в первом канале обработки напряжение задающего генератора сдвигают по фазе на 90°, выделяют напряжения разностной частоты, усиливают и ограничивают их по амплитуде, преобразуя в клиппированные напряжения прямоугольной формы, клиппированное напряжение первого канала обработки преобразуют в последовательность коротких положительных импульсов, временное положение которых соответствует моментам перехода напряжения через нулевой уровень с положительной производной, а клиппированное напряжение второго канала обработки инвертируют по фазе на 180°, полученными короткими положительными импульсами квантуют положительные соседние напряжения клиппированного напряжения второго канала обработки, сравнивают их между собой и автоматически в цифровой форме определяют не только величину доплеровской частоты, но и ее знак, при нулевом значении доплеровской частоты, что соответствует прохождению космическим аппаратом точки траверза, формируют импульс управления для разрешения дальнейшей обработки принимаемого сигнала.
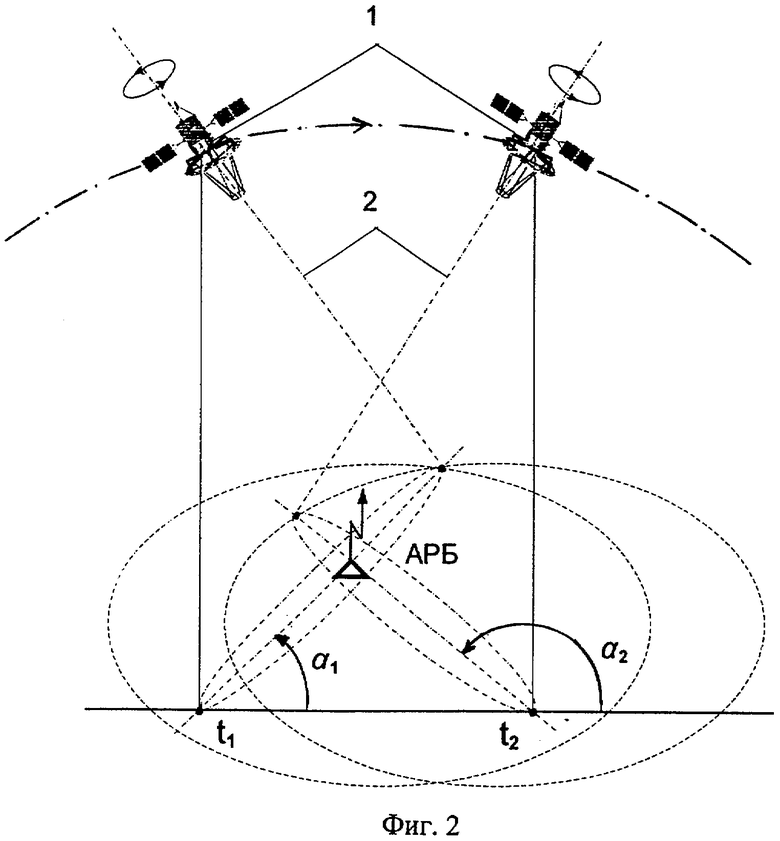
Геометрическая схема расположения КА и двух подспутниковых точек показана на фиг.1 и 2. Структурная схема бортовой аппаратуры КА изображена на фиг.3.
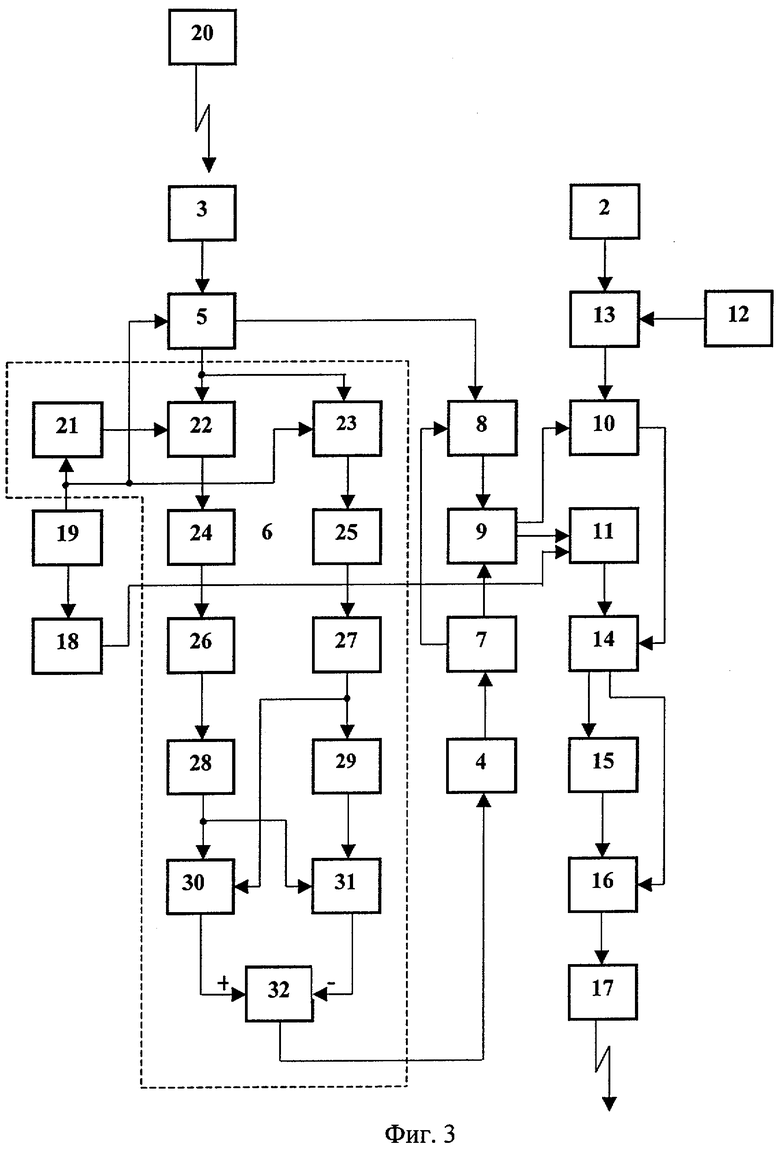
Бортовая аппаратура КА содержит корпус 1, импульсный инфракрасный датчик 2 горизонта и последовательно включенные приемную антенну 3, размещенную на одной оси противоположно инфракрасному датчику 2 горизонта, механическая ось которой не совпадает с осью вращения КА, приемное устройство 5, второй вход которого соединен с выходом бортового задающего генератора 19, измеритель 6 частоты Доплера, устройство 4 сравнения, заторможенный блокинг-генератор 7, схему И 9, второй вход которой через схему И 8 соединен с вторыми выходами приемного устройства 5 и блокинг-генератора 7, вентиль 10, схему 14 коммутации, магнитное запоминающее устройство 15, передатчик 16, второй вход которого соединен со вторым выходом схемы 14 коммутации, и передающую антенну 17. Ко второму выходу бортового задающего генератора 19 последовательно подключены бортовое временное устройство 18 и вентиль 11, второй вход которого соединен со вторым выходом схемы И 9, а выход подключен к второму входу схемы 14 коммутации. К выходу импульсного инфракрасного датчика 2 горизонта подключен счетчик 13 импульсов, второй вход которого соединен с выходом генератора 12 импульсов, а выход соединен со вторым входом вентиля 10.
Измеритель 6 частоты Доплера содержит два канала обработки, каждый их которых состоит из последовательно подключенных к первому выходу приемного устройства 5, смесителя 22 (23), второй вход которого соединен с первым выходом бортового задающего генератора 19 через фазовращатель 21 на 90° (и непосредственно), усилителя 24 (25) разностной частоты и усилителя-ограничителя 26 (27). К выходу усилителя-ограничителя 26 последовательно подключены формирователь 28 импульсов, первая схема И 30, второй вход которого соединен с выходом усилителя-ограничителя 27, и суммирующий вход реверсивного счетчика 32, выход которого подключен к входу устройства 4 сравнения. К выходу усилителя-ограничителя 27 последовательно подключены фазоинвертор 29 на 180° и вторая схема И 31, второй вход которой соединен с выходом формирователя 28 импульсов, а выход подключен к вычитающему входу реверсивного счетчика 32.
Предлагаемый способ осуществляется следующим образом.
Поступательное движение КА по орбите осуществляется с линейной скоростью V. Небольшой отрезок орбиты вблизи от точки А траверза будем считать отрезком прямой линии. Ось вращения КА отклонена от местной вертикали, она не совпадает с механической осью приемной антенны 3. Импульсный датчик 2 горизонта размещен на одной оси противоположно приемной антенне 3 (фиг.1, 2).
Поступательное движение КА, ось вращения которого отклонена от местной вертикали, обеспечивает перемещение линии сканирования диаграммы направленности приемной антенны 3 и последовательный просмотр полосы на поверхности Земли вдоль орбиты космического аппарата. Частота вращения КА выбирается из условия просмотра поверхности Земли без пропуска. Приемная антенна 3 выбирается такой, чтобы ось диаграммы направленности совпадала с механической осью антенны. Для устранения неоднозначности механическая ось приемной антенны 3 космического аппарата сдвигается относительно оси вращения на угол β, равный ширине диаграммы направленности приемной антенны (фиг.1, 2).
При появлении сигнала
uc(t)=Uccos(ωct+ϕc), 0≤t≤Tc,
где Uc, ωc, ϕc, Tc - амплитуда, несущая частота, начальная фаза и длительность сигнала
передатчика 20 аварийного объекта в просматриваемой полосе на поверхности Земли, он с выхода приемника 5 поступает на первый вход смесителей 22 и 23 измерителя 6 частоты Доплера, на второй вход которых подается напряжение бортового задающего генератора 19 через фазовращатель 21 на 90° и непосредственно соответственно:
uг1(t)=UГ·sin(ωгt+ϕг),
uг2(t)=UГ·cos(ωгt+ϕг),
где UГ, ωГ, ϕГ - амплитуда, частота и начальная фаза напряжения задающего генератора 19.
На выходе смесителей 22 и 23 образуются напряжения комбинационных частот. Усилителями 24 и 25 выделяются напряжения разностной частоты, т.е. частоты расстройки (частоты биений):
up1(t)=Up·sin(ωpt+ϕp),
up2(t)=Up·cos(ωpt+ϕp),
где 
K1 - коэффициент передачи смесителей;
ωр=ωc-ωГ - промежуточная частота;
ϕр=ϕс-ϕГ,
которые поступают на входы усилителей-ограничителей 26 и 27 соответственно. При этом если частота ωс принимаемого сигнала выше частоты ωГ задающего генератора 19, то напряжения разностной частоты up1(t) и up2(t), выделяемые усилителями 24 и 25 разностной частоты, будут сдвинуты относительно друг друга на 90°, в противном случае на -90°. Следовательно, фазовый сдвиг на разностной частоте ωр меняется скачком на 180° при изменении знака расстройки.
Измерение разностной частоты ωр производится электронно-счетным методом. Для этого напряжения разностной частоты up1(t) и up2(t) преобразуются с помощью усилителей-ограничителей 26 и 27 в клиппированные напряжения прямоугольной формы. Причем напряжение прямоугольной формы с выхода усилителя-ограничителя 26 с помощью формирователя 28 импульсов преобразуется в последовательность коротких положительных импульсов, временное положение которых соответствует моментам перехода напряжения через нулевой уровень с положительной производной. Напряжение прямоугольной формы с выхода усилителя-ограничителя 27 инвертируется по фазе на 180° с помощью фазоинвертора 29. Полученные короткие положительные импульсы поступают на первые входы схем совпадения И 30 и И 31, на вторые входы которых подается напряжение прямоугольной формы с выхода усилителя-ограничителя 27. Короткие положительные импульсы появляются на выходе той схемы совпадения И 30 и И 31, на выходе которой моменты появления коротких положительных импульсов совпадают с положительным значением прямоугольного напряжения, а их количество будет определяться частотой расстройки ωр. При этом показания реверсивного счетчика 32 будут соответствовать величине и знаку данной расстройки (доплеровской частоты).
Таким образом, измеритель 6 частоты Доплера позволяет автоматически определять не только величину доплеровской частоты, но и ее знак.
Достоинством данного измерителя является высокая точность измерения и представление результата измерения в двоичном коде.
При достижении частоты Доплера значения, равного нулю, механическая ось приемной антенны 3 находится в точке траверза. В этот момент устройством 4 сравнения формируется импульс управления для разрешения дальнейшей обработки принимаемого сигнала. В этот же момент времени измеряется значение угла между осью датчика 2 горизонта и положением механической оси приемной антенны 3 (угла α). Измерения привязываются к бортовому времени устройством 18 и записываются в магнитное запоминающее устройство 15 или передаются через передатчик 16 на наземный приемный пункт. Для определения координат аварийного объекта необходимо измерить угол α и вычислить координаты подспутниковой точки. По координатам двух подспутниковых точек и двум измеренным углам α1 и α2 однозначно определяется местоположение аварийного объекта.
Вычисление координат аварийного объекта возможно на борту КА при наличии бортовой цифровой вычислительной машины либо на наземном приемном пункте.
В исходном состоянии до попадания сигнала с передатчика 20 аварийного объекта в диаграмму направленности приемной антенны 3 на выходе приемника 5 сигнал отсутствует. На выходе схемы совпадения И 8 - нуль. Схема совпадения И 9 закрыта, на выходах схемы совпадения И 9 - нуль. Импульсный или инфракрасный датчик 2 горизонта в момент пересечения трассы космического аппарата вырабатывает импульс, который обнуляет счетчик 13 импульсов. С генератора 12 импульсов импульсы поступают на счетчик 13. Схема совпадения И 9 закрыта, вентили 10, 11 - закрыты.
При появлении сигнала с передатчика 20 аварийного объекта в полосе земной поверхности, просматриваемой диаграммой направленности приемной антенны 3, появляется сигнал на выходе приемника 5. На выходе схемы совпадения И 8 - единица. При достижении значения частоты Доплера на выходе измерителя 6, равного нулю, открывается устройство 4 сравнения, которое формирует импульс управления. Последний запускает заторможенный блокинг-генератор 7, на выходах схемы совпадения И 9 появляется единица. Открываются вентили 10, 11. Информация о значении угла α (количество импульсов, записанных в счетчик 13 импульсов) и времени измерения записывается через схему 14 коммутации на магнитное запоминающее устройство 15. В зоне приема наземного пункта управления космическим аппаратом информация сбрасывается с магнитного запоминающего устройства 15 через передатчик 16 и передающую антенну 17.
При срабатывании импульсного датчика 2 горизонта система возвращается в исходное состояние.
Последовательность описанных выше операций позволяет однозначно определять координаты аварийного объекта, сократить время его поиска, увеличить площадь просматриваемой поверхности Земли за счет сканирования приемной диаграммы направленности, увеличить соотношение сигнал/шум приемной радиолинии за счет использования приемных антенн с узкой диаграммой направленности.
Таким образом, предлагаемый способ по сравнению с прототипом и другими техническими решениями аналогичного назначения обеспечивает повышение точности измерения малых значений доплеровской частоты и фиксацию ее нулевого значения. Это достигается путем предварительного понижения частоты принимаемых колебаний с помощью гетеродинирования в двух каналах обработки. Достоинством предлагаемого способа является также представление результата измерения в двоичном коде.
В системе, реализующей предложенный способ, не проявляется каких-либо специфических жестких требований к стабильности несущей частоты ωс, излучаемой передатчиком аварийного объекта. Это является ее существенным преимуществом.
| название | год | авторы | номер документа |
|---|---|---|---|
| УГЛОМЕСТНО-ВРЕМЕННОЙ ДОПЛЕРОВСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ АВАРИЙНОГО ОБЪЕКТА | 2006 |
|
RU2329921C2 |
| УГЛОМЕСТНО-ВРЕМЕННОЙ ДОПЛЕРОВСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ АВАРИЙНОГО ОБЪЕКТА | 2006 |
|
RU2302645C1 |
| УГЛОМЕСТНО-ВРЕМЕННОЙ ДОПЛЕРОВСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ АВАРИЙНОГО ОБЪЕКТА | 2006 |
|
RU2313477C1 |
| УГЛОМЕСТНО-ВРЕМЕННАЯ ДОППЛЕРОВСКАЯ СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ АВАРИЙНОГО ОБЪЕКТА | 2007 |
|
RU2328416C1 |
| УГЛОМЕСТНО-ВРЕМЕННАЯ ДОПЛЕРОВСКАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ КООРДИНАТ АВАРИЙНОГО ОБЪЕКТА | 2008 |
|
RU2368550C1 |
| УГЛОМЕСТНО-ВРЕМЕННОЙ ДОПЛЕРОВСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ АВАРИЙНОГО ОБЪЕКТА | 1999 |
|
RU2174092C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ | 2019 |
|
RU2734108C1 |
| СПОСОБ РАДИОТЕХНИЧЕСКИХ ДОПЛЕРОВСКИХ УГЛОМЕРНЫХ ИЗМЕРЕНИЙ КОСМИЧЕСКОГО АППАРАТА И СИСТЕМА ДЛЯ ОСУЩЕСТВЛЕНИЯ ДАННОГО СПОСОБА | 2013 |
|
RU2526401C1 |
| СПОСОБ ПОСТРОЕНИЯ ФУНКЦИОНАЛЬНОГО ДОПОЛНЕНИЯ ОРБИТАЛЬНОГО БАЗИРОВАНИЯ К ГЛОБАЛЬНОЙ НАВИГАЦИОННОЙ СПУТНИКОВОЙ СИСТЕМЕ | 2008 |
|
RU2367910C1 |
| Способ измерения гравитационного ускорения космического аппарата | 2021 |
|
RU2768557C1 |
Изобретение относится к космической технике и может быть использовано для космических аппаратов, находящихся на орбите искусственного спутника Земли, кроме геостационарной, стабилизируемых вращением вдоль вертикальной оси. Система, реализующая предлагаемый способ, содержит корпус космического аппарата, импульсный инфракрасный датчик горизонта, приемную антенну, устройство сравнения, приемное устройство, измеритель частоты Доплера, заторможенный блокинг-генератор, две схемы совпадения, два вентиля, генератор импульсов, счетчик импульсов, схему коммутации, магнитное запоминающее устройство, передатчик, передающую антенну, бортовое временное устройство, бортовой задающий генератор и передатчик аварийного объекта. В состав измерителя частоты Доплера входят фазовращатель на 90°, два смесителя, два усилителя разностной частоты, два усилителя-ограничителя, формирователь импульсов, фазоинвертор на 180°, две схемы совпадения и реверсивный счетчик. В системе осуществляется предварительное понижение частоты принимаемых колебаний в двух каналах обработки. Изобретение позволяет повысить точность определения координат за счет точного измерения малых значений доплеровской частоты и фиксации ее нулевого значения. 3 ил.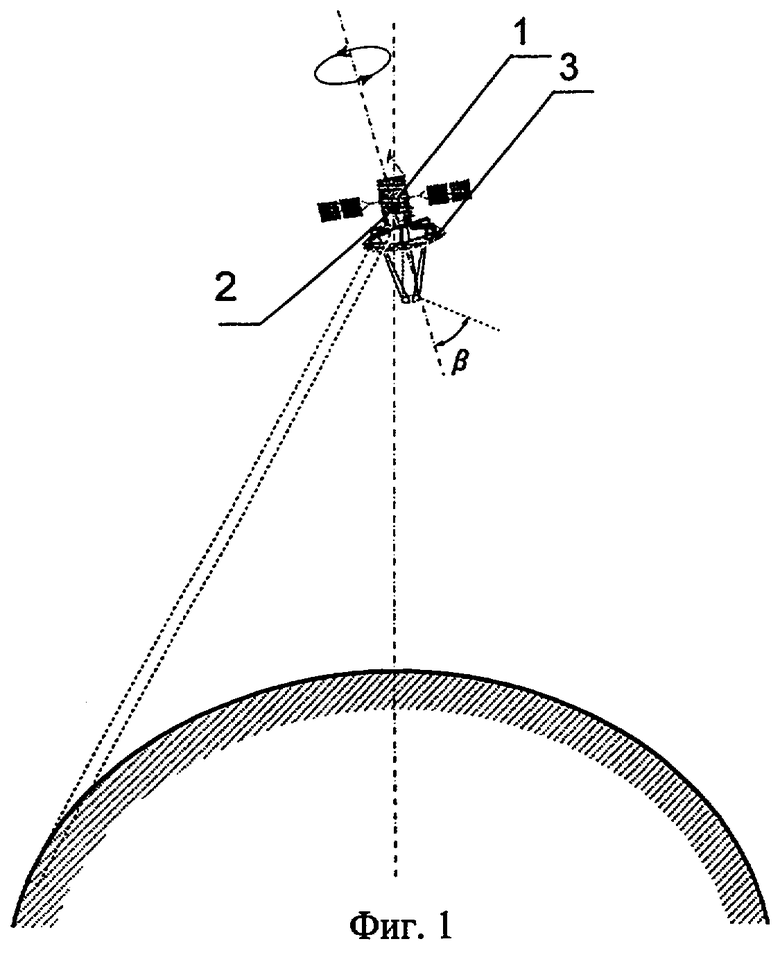
Угломестно-временной доплеровский способ определения координат аварийного объекта, находящегося на поверхности Земли, с помощью космического аппарата, стабилизируемого вращением вдоль вертикальной оси, заключающийся в том, что при появлении сигнала передатчика аварийного объекта на просматриваемой с космического аппарата полосе на поверхности Земли измеряют частоту Доплера беззапросным методом, находят пространственное положение космического аппарата в момент, когда частота Доплера принимаемого сигнала равна нулю, измеряют в этот момент времени угол между механической осью приемной антенны космического аппарата и осью датчика горизонта с привязкой измерения к бортовому времени, вычисляют координаты подспутниковой точки в момент указанного измерения, при этом измерения проводят два раза и по координатам двух подспутниковых точек и двум измерениям угла между механической осью приемной антенны космического аппарата и осью датчика горизонта определяют местоположение аварийного объекта на поверхности Земли, отличающийся тем, что для измерения частоты Доплера беззапросным методом используют два канала обработки, в которых принимаемый сигнал преобразуют по частоте с использованием бортового задающего генератора, при этом в первом канале обработки напряжение задающего генератора сдвигают по фазе на 90°, выделяют напряжения разностной частоты, усиливают и ограничивают их по амплитуде, преобразуют в клиппированные напряжения прямоугольной формы, клиппированное напряжение первого канала обработки преобразуют в последовательность коротких положительных импульсов, временное положение которых соответствует моментам перехода напряжения через нулевой уровень с положительной производной, а клиппированное напряжение второго канала обработки инвертируют по фазе на 180°, полученными короткими положительными импульсами квантуют положительные соседние напряжения клиппированного напряжения второго канала обработки, сравнивают их между собой и автоматически в цифровой форме определяют не только величину доплеровской частоты, но и ее знак, при нулевом значении доплеровской частоты, что соответствует прохождению космическим аппаратом точки траверза, формируют импульс управления для разрешения дальнейшей обработки принимаемого сигнала.
| УГЛОМЕСТНО-ВРЕМЕННОЙ ДОПЛЕРОВСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ АВАРИЙНОГО ОБЪЕКТА | 1999 |
|
RU2174092C2 |
| СПУТНИКОВАЯ СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ СУДОВ И САМОЛЕТОВ, ПОТЕРПЕВШИХ АВАРИЮ | 2003 |
|
RU2258940C1 |
| СПУТНИКОВАЯ СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ СУДОВ И САМОЛЁТОВ, ПОТЕРПЕВШИХ АВАРИЮ | 2001 |
|
RU2201601C2 |
| СПУТНИКОВАЯ СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ СУДОВ И САМОЛЕТОВ, ПОТЕРПЕВШИХ АВАРИЮ | 1992 |
|
RU2027195C1 |

